Wrench-Aware Admittance Control for Unknown-Payload Manipulation
Pith reviewed 2026-05-10 02:09 UTC · model grok-4.3
The pith
A wrench-aware admittance controller uses wrist force-torque data to estimate unknown payload mass and center-of-mass offset, improving transport and placement accuracy while keeping motion compliant.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper presents a wrench-aware admittance control framework for a UR5e robot that first applies a translational excitation term to reduce payload-induced forces during transport and then uses post-grasp wrist measurements to estimate payload mass for transport compensation followed by CoM offset estimation relative to the tool center point for improved placement and stacking.
What carries the argument
The dual-role use of wrist force-torque measurements: an excitation term during motion to suppress payload wrench effects, plus sequential estimation of mass and CoM offset from the same sensor data collected in translational motion.
If this is right
- Transport trajectories exhibit smaller unintended compliant deviations caused by payload imbalance.
- Object placement and stacking accuracy increase because the controller corrects the effective tool-center-point location.
- Compliant behavior is retained because compensation is added only through the existing admittance law rather than by raising gains.
- The same sensor data serves both real-time force cancellation and offline parameter estimation, avoiding extra hardware.
Where Pith is reading between the lines
- The method may generalize to tasks where the payload changes mid-operation if re-estimation can be triggered by a short translation segment.
- Combining the estimator with a brief calibration motion before each new grasp could reduce sensitivity to initial grasp pose variation.
- In multi-arm or mobile manipulation settings the same wrist data stream could feed into shared payload models across robots.
Load-bearing premise
Wrist force-torque readings taken while the robot translates after grasping can isolate payload mass and center-of-mass offset without large interference from robot dynamics, friction, or sensor noise.
What would settle it
Perform repeated pick-and-place trials with payloads whose mass and CoM are measured independently by scale and balance; if the controller's estimates deviate by more than a few percent or placement error does not decrease relative to the uncorrected baseline, the compensation claim fails.
Figures


read the original abstract
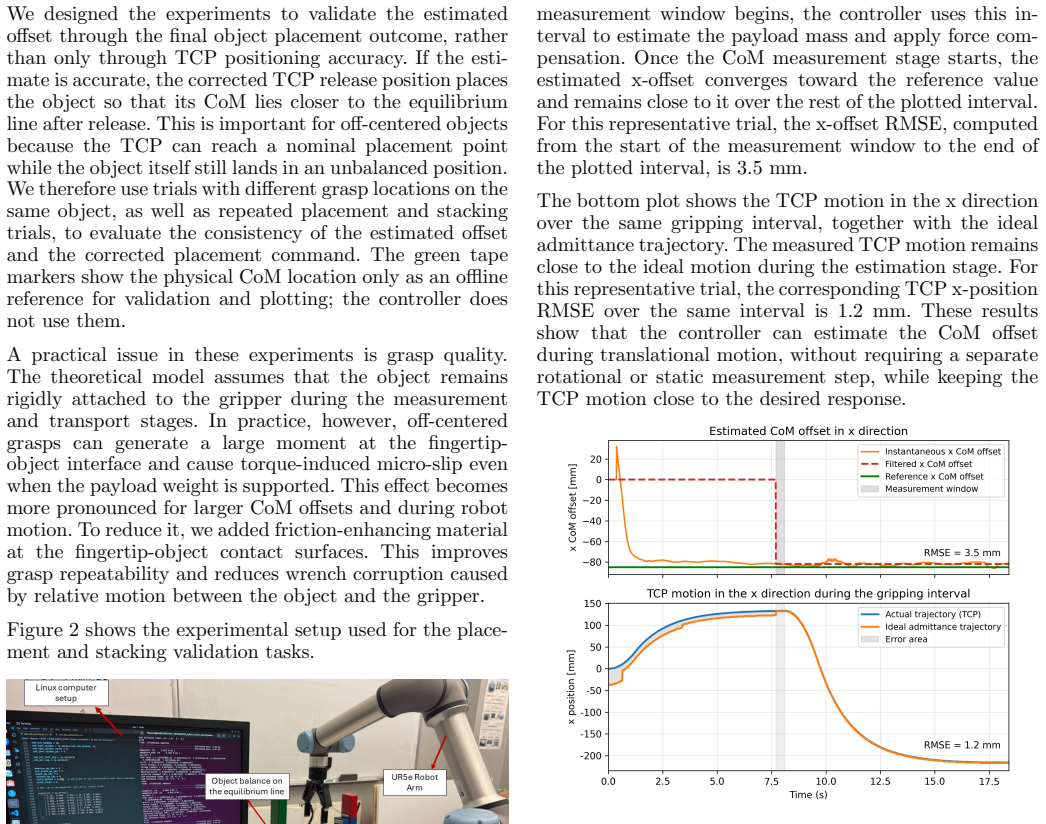
Unknown payloads can strongly affect compliant robotic manipulation, especially when the payload center of mass is not aligned with the tool center point. In this case, the payload generates an offset wrench at the robot wrist. During motion, this wrench is not only related to payload weight, but also to payload inertia. If it is not modeled, the compliant controller can interpret it as an external interaction wrench, which causes unintended compliant motion, larger tracking error, and reduced transport accuracy. This paper presents a wrench-aware admittance control framework for unknown-payload pick-and-place using a UR5e robot. The method uses force-torque measurements in two different roles. First, a three-axis translational excitation term is used to reduce payload-induced force effects during transport without making the robot excessively stiff. Second, after grasping, the controller first estimates payload mass for transport compensation and then estimates the payload CoM offset relative to the TCP using wrist force-torque measurements collected during the subsequent translational motion. This helps improve object placement and stacking behavior. Experimental results show improved transport and placement performance compared with uncorrected placement while preserving compliant motion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a wrench-aware admittance control framework for pick-and-place tasks with unknown payloads on a UR5e robot. It uses wrist force-torque (FT) measurements first to estimate payload mass, then to estimate the payload center-of-mass (CoM) offset relative to the tool center point (TCP) from data collected during post-grasp translational motion. These estimates are used to compensate the admittance controller so that payload-induced wrenches are not misinterpreted as external contacts, thereby improving transport accuracy and placement/stacking behavior while preserving compliant motion. Experimental results are claimed to show improvement over uncorrected placement.
Significance. If the CoM estimation procedure is shown to be robust against unmodeled dynamics, the approach could provide a practical, sensor-based way to handle unknown payloads in compliant manipulation without requiring full dynamic models or offline identification. The dual use of FT data for both mass and offset estimation is a potentially useful contribution to admittance control literature, but the absence of quantitative results, baselines, or error metrics in the provided description makes it difficult to gauge the magnitude of the improvement or its generalizability.
major comments (2)
- [Method / CoM estimation procedure] The central claim that post-grasp translational FT measurements suffice to isolate payload CoM offset (after mass estimation) is load-bearing, yet the abstract and method description provide no equations or procedure for removing acceleration-dependent inertial terms, joint friction, sensor bias, or dynamic coupling from the wrist wrench data. If these terms are non-negligible, the offset estimate will be biased and the subsequent admittance correction incorrect, directly undermining the reported placement improvement.
- [Experimental results] No quantitative experimental results, baselines, error bars, or statistical details are supplied to support the claim of improved transport and placement performance. Without these, it is impossible to evaluate whether the observed gains are statistically significant or practically meaningful relative to the uncorrected case.
minor comments (1)
- [Abstract] The abstract states that the wrench depends on payload inertia but does not clarify how this is handled during the translational excitation phase used for estimation.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment point by point below and indicate the revisions planned for the next version.
read point-by-point responses
-
Referee: [Method / CoM estimation procedure] The central claim that post-grasp translational FT measurements suffice to isolate payload CoM offset (after mass estimation) is load-bearing, yet the abstract and method description provide no equations or procedure for removing acceleration-dependent inertial terms, joint friction, sensor bias, or dynamic coupling from the wrist wrench data. If these terms are non-negligible, the offset estimate will be biased and the subsequent admittance correction incorrect, directly undermining the reported placement improvement.
Authors: We agree that the method section lacks sufficient detail on this point. The manuscript describes using post-grasp translational FT data for CoM estimation after mass estimation but does not supply explicit equations or a step-by-step procedure for isolating the gravitational offset wrench by removing inertial, friction, bias, and coupling contributions. We will revise the method section to include the full wrench model, the estimation equations, the data collection and preprocessing steps, and a discussion of the assumptions (such as low-acceleration motion) and their limitations. This will directly address the concern about potential bias in the offset estimate. revision: yes
-
Referee: [Experimental results] No quantitative experimental results, baselines, error bars, or statistical details are supplied to support the claim of improved transport and placement performance. Without these, it is impossible to evaluate whether the observed gains are statistically significant or practically meaningful relative to the uncorrected case.
Authors: We acknowledge that the experimental results, while demonstrating improved transport and placement behavior through figures and qualitative descriptions, do not include sufficient quantitative metrics, baselines, error bars, or statistical analysis. We will revise the results section to add detailed quantitative comparisons (e.g., placement error, trajectory deviation, and stacking success rates) against the uncorrected admittance controller, along with error bars and any applicable statistical tests. This will allow a clearer assessment of the practical significance of the improvements. revision: yes
Circularity Check
No circularity: estimation grounded in external sensor measurements
full rationale
The paper's core procedure estimates payload mass and CoM offset directly from wrist force-torque sensor readings taken during post-grasp translational motion, then feeds those values into an admittance controller. This chain depends on physical measurements and modeling assumptions about which dynamic terms can be neglected, rather than any result being defined in terms of itself or a fitted parameter that is then renamed as a prediction. No self-definitional equations, load-bearing self-citations, or ansatz smuggling appear in the described method; the estimates remain falsifiable against independent sensor data and are not forced by construction from the control performance metric.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Wrist force-torque measurements during translational motion after grasping can be used to estimate payload mass and CoM offset relative to the TCP
Reference graph
Works this paper leans on
-
[1]
Gholampour, H. and Beaver, L.E. (2025). Trajectory tracking with reachability-guided quadratic programming and freeze-resume. IEEE Control Systems Letters, 9, 2795--2800
work page 2025
-
[2]
Gholampour, H., Slightam, J.E., and Beaver, L.E. (2025). Mass-adaptive admittance control for robotic manipulators. IFAC-PapersOnLine, 59, 988--993
work page 2025
-
[3]
Hogan, N. (1985). Impedance control: An approach to manipulation: Part ii—implementation. Journal of dynamic systems, measurement, and control, 107, 8--16
work page 1985
-
[4]
Keemink, A.Q., Van der Kooij, H., and Stienen, A.H. (2018). Admittance control for physical human--robot interaction. The International Journal of Robotics Research, 37, 1421--1444
work page 2018
- [5]
-
[6]
Park, J., Kim, J.J., and Koh, D.Y. (2025). Experimental evaluation of precise placement with pushing primitive based on cartesian force control. Applied Sciences, 15, 387
work page 2025
-
[7]
Siciliano, B. and Khatib, O. (eds.) (2016). Springer Handbook of Robotics. Springer
work page 2016
-
[8]
Suomalainen, M., Karayiannidis, Y., and Kyrki, V. (2022). A survey of robot manipulation in contact. Robotics and Autonomous Systems, 156, 104224
work page 2022
-
[9]
Wang, C., Zang, X., Zhang, X., Liu, Y., and Zhao, J. (2021). Parameter estimation and object gripping based on fingertip force/torque sensors. Measurement, 179, 109479
work page 2021
-
[10]
Wen, D., Xiao, J., Xie, Y., Luo, T., Zhang, J., and Zhou, W. (2025). A universal tool interaction force estimation approach for robotic tool manipulation. Sensors, 25, 6619
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.