Recognition: unknown
A Gesture-Based Visual Learning Model for Acoustophoretic Interactions using a Swarm of AcoustoBots
Pith reviewed 2026-05-10 01:36 UTC · model grok-4.3
The pith
A vision-language model classifies hand gestures to switch AcoustoBot modalities with 87.8% accuracy in swarm experiments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
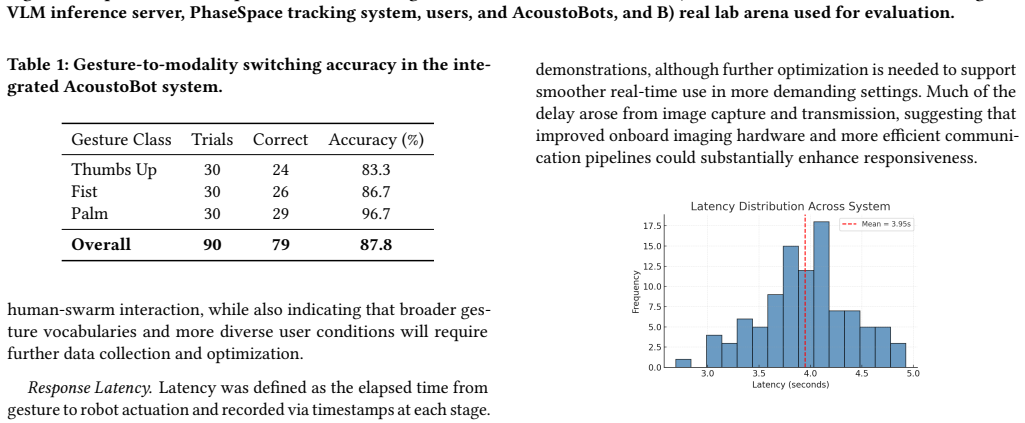
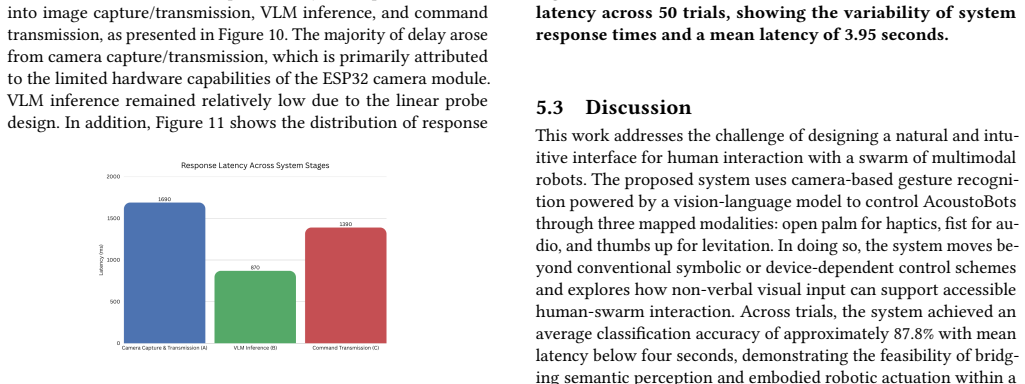
The paper establishes that an OpenCLIP-based visual learning model with linear probing can reliably classify three hand gestures captured by an ESP32-CAM and map them to haptics, audio, or levitation commands on a swarm of AcoustoBots, reaching 87.8% end-to-end switching accuracy and 3.95-second latency in controlled experiments with two robots while improving from 67% to 98% validation accuracy as the training dataset grows.
What carries the argument
The OpenCLIP-based visual learning model with linear probing, which takes ESP32-CAM gesture images as input, classifies them into one of three gestures, and directs the centralized processor to activate the matching modality on the AcoustoBots.
If this is right
- Larger gesture datasets directly improve classification accuracy up to nearly 98%.
- The mapping of gestures to modalities enables real-time contactless switching between haptics, audio, and levitation on the robots.
- Centralized processing supports the reported 3.95-second end-to-end latency in small-swarm trials.
- The approach provides a working foundation for replacing scripted commands with intuitive visual interfaces in acoustophoretic swarms.
Where Pith is reading between the lines
- Extending the gesture vocabulary beyond three classes could support more complex swarm behaviors without retraining the entire model from scratch.
- Decentralizing the image processing across multiple ESP32-CAM units might lower latency when scaling to larger swarms.
- The same linear-probing technique could be tested on other pre-trained vision models to compare robustness for robotic gesture tasks.
- Real-world deployment would require explicit trials measuring accuracy under simultaneous multi-user input or outdoor lighting changes.
Load-bearing premise
The linear-probed OpenCLIP classifier trained on a small controlled dataset will keep high accuracy when gestures vary in speed, lighting, background, or when multiple users interact at once.
What would settle it
Running the gesture classifier in an experiment with changing background clutter or users performing the same gestures at different speeds and observing accuracy fall below 70% would show the model does not maintain reliable performance outside the training conditions.
Figures






read the original abstract
AcoustoBots are mobile acoustophoretic robots capable of delivering mid-air haptics, directional audio, and acoustic levitation, but existing implementations rely on scripted commands and lack an intuitive interface for real-time human control. This work presents a gesture-based visual learning framework for contactless human-swarm interaction with a multimodal AcoustoBot platform. The system combines ESP32-CAM gesture capture, PhaseSpace motion tracking, centralized processing, and an OpenCLIP-based visual learning model (VLM) with linear probing to classify three hand gestures and map them to haptics, audio, and levitation modalities. Validation accuracy improved from about 67% with a small dataset to nearly 98% with the largest dataset. In integrated experiments with two AcoustoBots, the system achieved an overall gesture-to-modality switching accuracy of 87.8% across 90 trials, with an average end-to-end latency of 3.95 seconds. These results demonstrate the feasibility of using a vision-language-model-based gesture interface for multimodal human-swarm interaction. While the current system is limited by centralized processing, a static gesture set, and controlled-environment evaluation, it establishes a foundation for more expressive, scalable, and accessible swarm robotic interfaces.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a gesture-based visual learning framework for contactless human-swarm interaction with AcoustoBots, which are mobile acoustophoretic robots. It uses an ESP32-CAM for gesture capture, PhaseSpace tracking, and a linear-probed OpenCLIP visual learning model to classify three hand gestures and map them to haptics, audio, and levitation modalities. The work reports validation accuracy improving to nearly 98% with larger datasets and an integrated experiment result of 87.8% gesture-to-modality switching accuracy across 90 trials with two AcoustoBots, along with 3.95s average end-to-end latency.
Significance. If the reported accuracies and low latency generalize, the work would establish a practical foundation for intuitive, vision-language-model-based interfaces in multimodal robotic swarms, advancing contactless human-swarm interaction for applications involving mid-air haptics and acoustic levitation. The use of linear probing on OpenCLIP is a lightweight and accessible technique that could be extended, though the current evaluation under controlled conditions limits broader claims.
major comments (3)
- [Abstract] Abstract: The headline claims of 87.8% overall accuracy across 90 trials and 3.95s latency are presented without any accompanying dataset sizes, number of samples per gesture class, training hyperparameters for the linear probe, baseline comparisons (e.g., to other classifiers or end-to-end models), error bars, or statistical tests, preventing verification of whether these numbers support the feasibility conclusion.
- [Experiments] Experiments section (integrated trials): The 87.8% gesture-to-modality accuracy is obtained under the same controlled-environment conditions used for training the OpenCLIP linear probe (reaching ~98% validation accuracy); no ablation, cross-validation, or test sets are described that vary gesture speed, lighting, background clutter, camera angle, or simultaneous multi-user input, so the result does not yet demonstrate robustness required for the claimed real-world human-swarm interface.
- [Methods] Methods (visual learning model): The linear-probed OpenCLIP classifier is the load-bearing component for mapping gestures to modalities, yet the manuscript provides no details on the size or diversity of the collected gesture image dataset, the exact probing procedure, or any regularization to mitigate overfitting to the small, controlled training distribution.
minor comments (2)
- [Abstract] The abstract and conclusion mention limitations (centralized processing, static gesture set, controlled evaluation) but do not quantify their impact or outline concrete next steps for addressing generalization.
- [Figures] Figure captions and system diagrams could more clearly label data flow between ESP32-CAM, PhaseSpace, centralized processor, and the VLM to improve readability for readers unfamiliar with the hardware.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive suggestions. We address each of the major comments below and outline the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline claims of 87.8% overall accuracy across 90 trials and 3.95s latency are presented without any accompanying dataset sizes, number of samples per gesture class, training hyperparameters for the linear probe, baseline comparisons (e.g., to other classifiers or end-to-end models), error bars, or statistical tests, preventing verification of whether these numbers support the feasibility conclusion.
Authors: We agree that the abstract would benefit from additional context to support the reported figures. In the revised manuscript, we will incorporate the total size of the gesture dataset, the number of samples per gesture class, and the training hyperparameters used for the linear probe (such as the optimizer, learning rate, and number of epochs). For baseline comparisons, error bars, and statistical tests, these were not part of the original analysis; we will add a statement acknowledging this and include basic error bars derived from the trial data where possible. Full comparative baselines would require new experiments beyond the scope of this initial study. revision: partial
-
Referee: [Experiments] Experiments section (integrated trials): The 87.8% gesture-to-modality accuracy is obtained under the same controlled-environment conditions used for training the OpenCLIP linear probe (reaching ~98% validation accuracy); no ablation, cross-validation, or test sets are described that vary gesture speed, lighting, background clutter, camera angle, or simultaneous multi-user input, so the result does not yet demonstrate robustness required for the claimed real-world human-swarm interface.
Authors: The evaluation was indeed performed in a controlled laboratory setting to validate the core functionality of the gesture-to-modality mapping. We will revise the Experiments section to more clearly state the controlled conditions and add a new subsection on limitations that explicitly discusses the absence of ablations and tests under varying conditions such as lighting changes or multi-user scenarios. While we recognize that robustness testing would enhance the work, the current results establish initial feasibility for the proposed interface. We do not plan to conduct additional experiments for this revision but will temper the claims accordingly. revision: partial
-
Referee: [Methods] Methods (visual learning model): The linear-probed OpenCLIP classifier is the load-bearing component for mapping gestures to modalities, yet the manuscript provides no details on the size or diversity of the collected gesture image dataset, the exact probing procedure, or any regularization to mitigate overfitting to the small, controlled training distribution.
Authors: We acknowledge the need for greater transparency in the Methods section. The revised manuscript will specify the exact size and composition of the gesture image dataset, including the number of images per class and any measures of diversity (e.g., variations in hand poses within the controlled setup). We will detail the linear probing procedure, including how the OpenCLIP vision encoder was frozen and the classification head trained, along with any regularization applied (e.g., L2 regularization or early stopping) to address potential overfitting. revision: yes
Circularity Check
No circularity: empirical accuracies are measured outcomes, not derived by construction
full rationale
The paper presents a system description followed by empirical results: a linear probe on OpenCLIP is trained on the authors' collected gesture images, validation accuracy is reported on held-out portions of that data, and end-to-end accuracy is measured in 90 integrated trials with two physical AcoustoBots. No equations, derivations, or self-citations are invoked that reduce the reported 87.8% or 98% figures to fitted parameters or prior author work by definition. The performance numbers are direct experimental measurements under the stated conditions; they do not loop back to the inputs via any of the enumerated circular patterns. Generalization concerns exist but are separate from circularity.
Axiom & Free-Parameter Ledger
free parameters (1)
- linear probing weights
axioms (1)
- domain assumption OpenCLIP image embeddings contain sufficient information to distinguish the three chosen hand gestures under controlled lighting and pose conditions.
Reference graph
Works this paper leans on
-
[1]
Springer, 2018
Heiko Hamann.Swarm robotics: A formal approach, volume 221. Springer, 2018
2018
-
[2]
Human interaction with robot swarms: A survey.IEEE Transactions on Human-Machine Systems, 46(1):9–26, 2015
Andreas Kolling, Phillip Walker, Nilanjan Chakraborty, Katia Sycara, and Michael Lewis. Human interaction with robot swarms: A survey.IEEE Transactions on Human-Machine Systems, 46(1):9–26, 2015
2015
-
[3]
User- defined swarm robot control
Lawrence H Kim, Daniel S Drew, Veronika Domova, and Sean Follmer. User- defined swarm robot control. InProceedings of the 2020 CHI Conference on Human Factors in Computing Systems, pages 1–13, 2020
2020
-
[4]
Malaika Zafar, Roohan Ahmed Khan, Faryal Batool, Yasheerah Yaqoot, Ziang Guo, Mikhail Litvinov, Aleksey Fedoseev, and Dzmitry Tsetserukou. Swarmvlm: Vlm-guided impedance control for autonomous navigation of heterogeneous robots in dynamic warehousing.arXiv preprint arXiv:2508.07814, 2025
-
[5]
Faryal Batool, Malaika Zafar, Yasheerah Yaqoot, Roohan Ahmed Khan, Muham- mad Haris Khan, Aleksey Fedoseev, and Dzmitry Tsetserukou. Impedancegpt: Vlm-driven impedance control of swarm of mini-drones for intelligent navigation in dynamic environment.arXiv preprint arXiv:2503.02723, 2025
-
[6]
Swarm body: Embodied swarm robots
Sosuke Ichihashi, So Kuroki, Mai Nishimura, Kazumi Kasaura, Takefumi Hiraki, Kazutoshi Tanaka, and Shigeo Yoshida. Swarm body: Embodied swarm robots. In Proceedings of the 2024 CHI Conference on Human Factors in Computing Systems, pages 1–19, 2024
2024
-
[7]
Swarmpaint: Human-swarm interaction for trajectory generation and formation control by dnn-based gesture interface
Valerii Serpiva, Ekaterina Karmanova, Aleksey Fedoseev, Stepan Perminov, and Dzmitry Tsetserukou. Swarmpaint: Human-swarm interaction for trajectory generation and formation control by dnn-based gesture interface. In2021 Inter- national Conference on Unmanned Aircraft Systems (ICUAS), pages 1055–1062. IEEE, 2021
2021
-
[8]
Gesture-controlled aerial robot formation for human-swarm interaction in safety monitoring appli- cations.IEEE Robotics and Automation Letters, 2025
Vít Krátk `y, Giuseppe Silano, Matouš Vrba, Christos Papaioannidis, Ioannis Mademlis, Robert Pěnička, Ioannis Pitas, and Martin Saska. Gesture-controlled aerial robot formation for human-swarm interaction in safety monitoring appli- cations.IEEE Robotics and Automation Letters, 2025
2025
-
[9]
Sonarios: A design futuring-driven exploration of acoustophoresis
Ceylan Beşevli, Lei Gao, Narsimlu Kemsaram, Giada Brianza, Orestis Georgiou, Sriram Subramanian, and Marianna Obrist. Sonarios: A design futuring-driven exploration of acoustophoresis. InProceedings of the 2025 ACM Designing Inter- active Systems Conference, pages 740–753, 2025
2025
-
[10]
Gs-pat: high-speed multi-point sound-fields for phased arrays of transducers.ACM Transactions on Graphics (TOG), 39(4):138–1, 2020
Diego Martinez Plasencia, Ryuji Hirayama, Roberto Montano-Murillo, and Sriram Subramanian. Gs-pat: high-speed multi-point sound-fields for phased arrays of transducers.ACM Transactions on Graphics (TOG), 39(4):138–1, 2020
2020
-
[11]
Acoustobots: A swarm of robots for acoustophoretic multimodal interactions.Frontiers in Robotics and AI, Volume 12 - 2025, 2025
Narsimlu Kemsaram, James Hardwick, Jincheng Wang, Bonot Gautam, Cey- lan Besevli, Giorgos Christopoulos, Sourabh Dogra, Lei Gao, Akin Delibasi, Diego Martinez Plasencia, Orestis Georgiou, Marianna Obrist, Ryuji Hirayama, and Sriram Subramanian. Acoustobots: A swarm of robots for acoustophoretic multimodal interactions.Frontiers in Robotics and AI, Volume ...
2025
-
[12]
A cooperative contactless object transport with acoustic robots
Narsimlu Kemsaram, Akin Delibasi, James Hardwick, Bonot Gautam, Diego Mar- tinez Plasencia, and Sriram Subramanian. A cooperative contactless object transport with acoustic robots. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 18043–18050. IEEE, 2025
2025
-
[13]
Understanding deep learning requires rethinking generalization
Chiyuan Zhang, Samy Bengio, Moritz Hardt, Benjamin Recht, and Oriol Vinyals. Understanding deep learning requires rethinking generalization.arXiv preprint arXiv:1611.03530, 2016
work page internal anchor Pith review arXiv 2016
-
[14]
Learning transferable visual models from natural language supervision
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, et al. Learning transferable visual models from natural language supervision. In International conference on machine learning, pages 8748–8763. PmLR, 2021
2021
-
[15]
Reproducible scaling laws for contrastive language-image learning
Mehdi Cherti, Romain Beaumont, Ross Wightman, Mitchell Wortsman, Gabriel Ilharco, Cade Gordon, Christoph Schuhmann, Ludwig Schmidt, and Jenia Jitsev. Reproducible scaling laws for contrastive language-image learning. InProceed- ings of the IEEE/CVF conference on computer vision and pattern recognition, pages 2818–2829, 2023
2023
-
[16]
Hand gesture recognition based on computer vision: a review of techniques.journal of Imaging, 6(8):73, 2020
Munir Oudah, Ali Al-Naji, and Javaan Chahl. Hand gesture recognition based on computer vision: a review of techniques.journal of Imaging, 6(8):73, 2020
2020
-
[17]
Jia Chuan A Tan, Wesley P Chan, Nicole L Robinson, Elizabeth A Croft, and Dana Kulic. A proposed set of communicative gestures for human robot interaction and an rgb image-based gesture recognizer implemented in ros.arXiv preprint arXiv:2109.09908, 2021
-
[18]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
Alexey Dosovitskiy, Lucas Beyer, Alexander Kolesnikov, Dirk Weissenborn, Xi- aohua Zhai, Thomas Unterthiner, Mostafa Dehghani, Matthias Minderer, Georg Heigold, Sylvain Gelly, et al. An image is worth 16x16 words: Transformers for image recognition at scale.arXiv preprint arXiv:2010.11929, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[19]
A simple framework for contrastive learning of visual representations
Ting Chen, Simon Kornblith, Mohammad Norouzi, and Geoffrey Hinton. A simple framework for contrastive learning of visual representations. InInternational conference on machine learning, pages 1597–1607. PmLR, 2020
2020
-
[20]
Deep residual learning for image recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for image recognition. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 770–778, 2016
2016
-
[21]
Learning to prompt for vision-language models.International Journal of Computer Vision, 130(9):2337–2348, 2022
Kaiyang Zhou, Jingkang Yang, Chen Change Loy, and Ziwei Liu. Learning to prompt for vision-language models.International Journal of Computer Vision, 130(9):2337–2348, 2022
2022
-
[22]
Overcoming catastrophic forgetting in neural net- works.Proceedings of the national academy of sciences, 114(13):3521–3526, 2017
James Kirkpatrick, Razvan Pascanu, Neil Rabinowitz, Joel Veness, Guillaume Desjardins, Andrei A Rusu, Kieran Milan, John Quan, Tiago Ramalho, Agnieszka Grabska-Barwinska, et al. Overcoming catastrophic forgetting in neural net- works.Proceedings of the national academy of sciences, 114(13):3521–3526, 2017
2017
-
[23]
Learning to learn single domain generalization
Fengchun Qiao, Long Zhao, and Xi Peng. Learning to learn single domain generalization. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 12556–12565, 2020
2020
-
[24]
Ananya Kumar, Aditi Raghunathan, Robbie Jones, Tengyu Ma, and Percy Liang. Fine-tuning can distort pretrained features and underperform out-of-distribution. arXiv preprint arXiv:2202.10054, 2022
-
[25]
Decoupled Weight Decay Regularization
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[26]
MIT press Cambridge, 2016
Ian Goodfellow, Yoshua Bengio, Aaron Courville, and Yoshua Bengio.Deep learning, volume 1. MIT press Cambridge, 2016
2016
-
[27]
On Large-Batch Training for Deep Learning: Generalization Gap and Sharp Minima
Nitish Shirish Keskar, Dheevatsa Mudigere, Jorge Nocedal, Mikhail Smelyanskiy, and Ping Tak Peter Tang. On large-batch training for deep learning: Generaliza- tion gap and sharp minima.arXiv preprint arXiv:1609.04836, 2016
work page internal anchor Pith review arXiv 2016
-
[28]
John Bridle. Training stochastic model recognition algorithms as networks can lead to maximum mutual information estimation of parameters.Advances in neural information processing systems, 2, 1989
1989
-
[29]
Onnx: Open neural network exchange, 2019
Junjie Bai, Fang Lu, Ke Zhang, et al. Onnx: Open neural network exchange, 2019
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.