Strain in Sound: Soft Corrugated Tube for Local Strain Sensing with Acoustic Resonance
Pith reviewed 2026-05-10 01:33 UTC · model grok-4.3
The pith
A soft corrugated tube senses local strain by how air-flow resonance frequencies shift with stretch.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
When air flows through the corrugated tube, it excites standing wave resonances whose frequencies depend on length and cavity geometry; local stretching modifies these in distinguishable ways, allowing a machine learning model trained on swept flow rates to recover segmental strain values.
What carries the argument
The resonance frequency and frequency-flow speed relationship modulated by strain-altered cavity widths in the corrugated tube, processed by a gradient boosting regressor.
Load-bearing premise
That the observed changes in resonance frequency and frequency-flow relationship are caused primarily by strain-induced geometry changes rather than by temperature, humidity, material fatigue, or flow turbulence.
What would settle it
Repeat the experiments while intentionally varying temperature or humidity and check whether the mean absolute error of the strain estimates stays below 1 mm.
Figures






read the original abstract
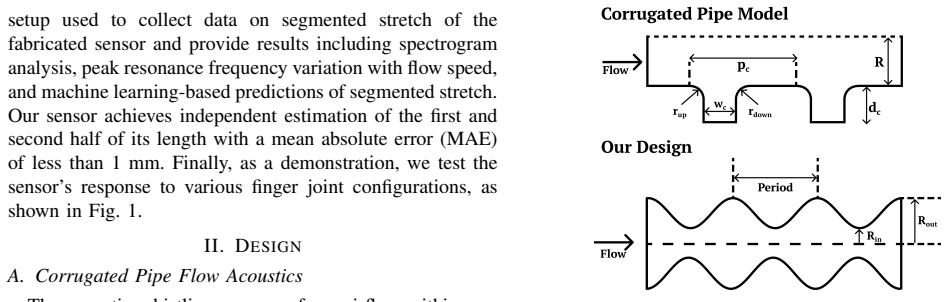
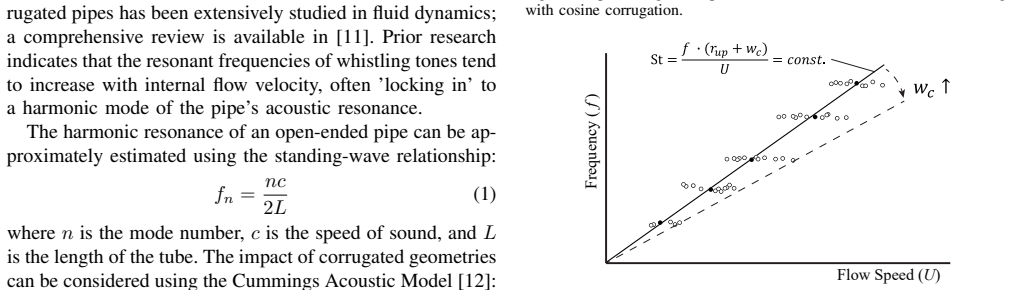
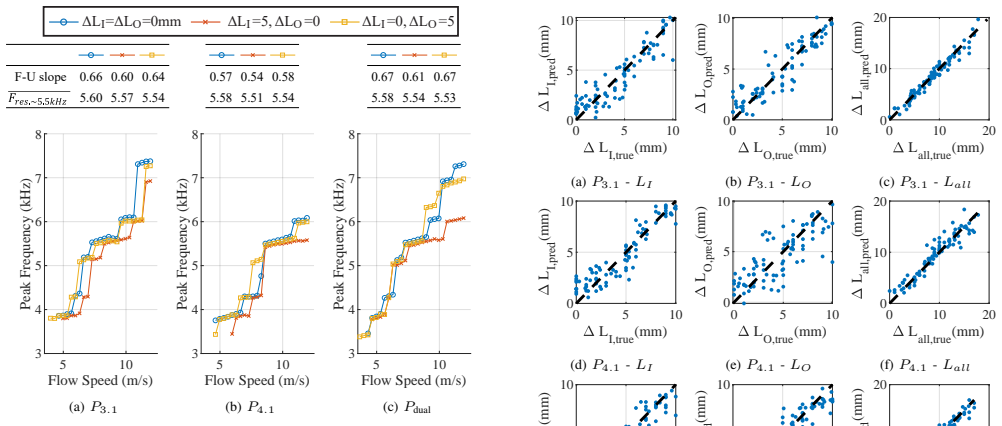
We present a soft corrugated tube sensor designed to estimate strain in each half segment. When air flows through the tube, the internal corrugated cavities induce pressure oscillations that excite the tube's standing wave resonance mode, generating an acoustic tone. Stretching the tube affects both the resonance mode frequency, due to changes in overall length, and the frequency-flow speed relationship, due to variations in cavity width, which is particularly useful for local strain estimation. By sweeping flow rates in a controlled manner, we collected resonance frequency data across flow speeds under various local stretch conditions, enabling a machine learning algorithm (gradient boosting regressor) to estimate segmental strain with high accuracy. The dual-period tube design (3.1 mm and 4.18 mm corrugation periods) achieved a mean absolute error (MAE) of 0.8 mm, while the single-period tube (3.1 mm) provided a satisfactory MAE of 1 mm. Testing on a mannequin finger demonstrated the sensor's capability to differentiate multi-joint configurations, showing its potential for estimating non-uniform deformations in soft bodies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a soft corrugated tube sensor for estimating local segmental strain. Air flow through the tube's internal corrugations generates pressure oscillations and acoustic resonance; stretching alters both the resonance frequency (via length change) and the frequency-flow relationship (via cavity width change). Resonance frequency data collected while sweeping flow rates under controlled local stretches are used to train a gradient boosting regressor, yielding MAE of 0.8 mm for a dual-period tube (3.1 mm and 4.18 mm corrugations) and 1 mm for a single-period tube. The sensor is demonstrated on a mannequin finger to differentiate multi-joint configurations.
Significance. If the reported performance holds under rigorous validation, the work introduces a low-cost, electronics-free acoustic method for local strain sensing in soft bodies, which could be valuable for soft robotics and wearable applications. The dual-period design and concrete experimental MAE numbers from flow-sweep data collection are positive elements that provide a clear performance benchmark.
major comments (2)
- [Abstract] Abstract: The headline MAE claims (0.8 mm dual-period, 1 mm single-period) are obtained via gradient boosting on resonance frequencies, yet the abstract supplies no information on the number of independent trials, cross-validation procedure, train/test split, or statistical variability. Without these, it is impossible to assess whether the reported accuracy reflects genuine strain sensitivity or overfitting to the specific experimental conditions.
- [Abstract] Abstract: The method's validity rests on the assumption that observed shifts in resonance frequency and frequency-flow curves are dominated by strain-induced changes in cavity geometry and tube length. The manuscript provides no quantitative evidence or controls demonstrating that temperature, humidity, material fatigue, or flow turbulence produce negligible effects relative to the strain signal; any of these factors can alter speed of sound or pressure oscillations at comparable scales.
minor comments (1)
- [Abstract] Abstract: The phrase 'satisfactory MAE of 1 mm' is vague; replacing it with a direct comparison to application tolerances or to a non-ML baseline would improve clarity.
Simulated Author's Rebuttal
We thank the referee for their constructive comments on our manuscript. We address each major comment below and describe the changes we will make to strengthen the presentation of our results and assumptions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline MAE claims (0.8 mm dual-period, 1 mm single-period) are obtained via gradient boosting on resonance frequencies, yet the abstract supplies no information on the number of independent trials, cross-validation procedure, train/test split, or statistical variability. Without these, it is impossible to assess whether the reported accuracy reflects genuine strain sensitivity or overfitting to the specific experimental conditions.
Authors: We agree that the abstract should convey more information about how the reported MAE values were obtained. The full manuscript describes data collection across multiple independent trials under controlled stretch conditions and the use of cross-validation for the gradient boosting regressor. In the revised manuscript we will update the abstract with a brief clause indicating that the MAE figures were obtained via cross-validation on data from independent trials, with full details on the procedure, splits, and observed variability provided in the methods and results sections. This change will allow readers to better evaluate the robustness of the performance claims. revision: yes
-
Referee: [Abstract] Abstract: The method's validity rests on the assumption that observed shifts in resonance frequency and frequency-flow curves are dominated by strain-induced changes in cavity geometry and tube length. The manuscript provides no quantitative evidence or controls demonstrating that temperature, humidity, material fatigue, or flow turbulence produce negligible effects relative to the strain signal; any of these factors can alter speed of sound or pressure oscillations at comparable scales.
Authors: We acknowledge that the manuscript does not supply quantitative controls or direct measurements isolating the effects of temperature, humidity, material fatigue, or flow turbulence. Experiments were performed in a temperature-controlled laboratory with short-duration trials to limit fatigue and turbulence, but no dedicated quantification of these factors relative to the strain signal was included. In the revision we will add a short discussion subsection that addresses these potential confounders using first-order physical estimates (e.g., the known temperature dependence of the speed of sound) and describes the experimental precautions taken. We will also explicitly list this as a limitation and an avenue for future work. This addition will make the underlying assumptions more transparent without requiring new experiments at this stage. revision: partial
Circularity Check
No circularity: purely empirical ML mapping from controlled experiments
full rationale
The paper describes an experimental workflow: air is flowed through the tube at swept rates while local stretches are applied, resonance frequencies are recorded, and a gradient boosting regressor is trained to map those frequencies to segmental strain values. The reported MAEs (0.8 mm dual-period, 1 mm single-period) are direct test-set performance numbers from this supervised learning procedure. No first-principles derivation, closed-form equation, or prediction step is claimed that reduces by construction to fitted constants or to the training inputs themselves. No self-citations, uniqueness theorems, or ansatzes are invoked as load-bearing elements. The method is therefore self-contained as a data-driven sensor calibration and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- corrugation periods
axioms (1)
- standard math Acoustic standing-wave resonance occurs inside a corrugated tube and its frequency depends on effective length and cavity geometry.
Reference graph
Works this paper leans on
-
[1]
Soft robots modeling: A structured overview,
C. Armanini, F. Boyer, A. T. Mathew, C. Duriez, and F. Renda, “Soft robots modeling: A structured overview,”IEEE Transactions on Robotics, vol. 39, no. 3, pp. 1728–1748, 2023
work page 2023
-
[2]
Model-based control of soft robots: A survey of the state of the art and open challenges,
C. Della Santina, C. Duriez, and D. Rus, “Model-based control of soft robots: A survey of the state of the art and open challenges,”IEEE Control Systems Magazine, vol. 43, no. 3, pp. 30–65, 2023
work page 2023
-
[3]
Data-driven control of soft robots using koopman operator theory,
D. Bruder, X. Fu, R. B. Gillespie, C. D. Remy, and R. Vasudevan, “Data-driven control of soft robots using koopman operator theory,” IEEE Transactions on Robotics, vol. 37, no. 3, pp. 948–961, 2020
work page 2020
-
[4]
Wearable and stretchable strain sensors: materials, sensing mechanisms, and applications,
H. Souri, H. Banerjee, A. Jusufi, N. Radacsi, A. A. Stokes, I. Park, M. Sitti, and M. Amjadi, “Wearable and stretchable strain sensors: materials, sensing mechanisms, and applications,”Advanced Intelli- gent Systems, vol. 2, no. 8, p. 2000039, 2020
work page 2020
-
[5]
Flexible and stretchable photonic sensors based on modulation of light transmission,
W. Peng and H. Wu, “Flexible and stretchable photonic sensors based on modulation of light transmission,”Advanced Optical Materials, vol. 7, no. 12, p. 1900329, 2019
work page 2019
-
[6]
Cnt-based sensor arrays for local strain measurements in soft pneumatic actuators,
T. Pinto, L. Cai, C. Wang, and X. Tan, “Cnt-based sensor arrays for local strain measurements in soft pneumatic actuators,”Int. J. Intelligent Robotics and Applications, vol. 1, pp. 157–166, 2017
work page 2017
-
[7]
Passive and active acoustic sensing for soft pneumatic actuators,
V . Wall, G. Z ¨oller, and O. Brock, “Passive and active acoustic sensing for soft pneumatic actuators,”The International Journal of Robotics Research, vol. 42, no. 3, pp. 108–122, 2023
work page 2023
-
[8]
Soft acoustic curva- ture sensor: Design and development,
M. S. Sofla, H. Golshanian, A. Ghalamzan,et al., “Soft acoustic curva- ture sensor: Design and development,”IEEE Robotics and Automation Letters, 2024
work page 2024
-
[9]
Acoustac: Tactile sensing with acoustic resonance for electronics-free soft skin,
M. S. Li and H. S. Stuart, “Acoustac: Tactile sensing with acoustic resonance for electronics-free soft skin,”Soft Robotics, 2024
work page 2024
-
[10]
Resonant pneumatic tactile sensing for soft grippers,
M. S. Li, T. M. Huh, C. R. Yahnker, and H. S. Stuart, “Resonant pneumatic tactile sensing for soft grippers,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 105–10 111, 2022
work page 2022
-
[11]
Acoustics of corrugated pipes: A review,
B. Rajavel and M. Prasad, “Acoustics of corrugated pipes: A review,” Applied Mechanics Reviews, vol. 65, no. 5, p. 050801, 2013
work page 2013
-
[12]
Lecture notes on the mathematics of acoustics,
M. C. M. Wright, “Lecture notes on the mathematics of acoustics,”
-
[13]
Available: https://api.semanticscholar.org/CorpusID: 120724789
[Online]. Available: https://api.semanticscholar.org/CorpusID: 120724789
-
[14]
Sound generation in corrugated tubes,
Y . Nakamura and N. Fukamachi, “Sound generation in corrugated tubes,”Fluid Dynamics Research, vol. 7, no. 5-6, pp. 255–261, 1991
work page 1991
-
[15]
Whistling behavior of periodic systems: Corrugated pipes and multi- ple side branch system,
G. Nakibo ˘glu, S. P. Belfroid, J. F. Willems, and A. Hirschberg, “Whistling behavior of periodic systems: Corrugated pipes and multi- ple side branch system,”International Journal of Mechanical Sciences, vol. 52, no. 11, pp. 1458–1470, 2010
work page 2010
-
[16]
C. K. Jha, K. Gajapure, and A. L. Chakraborty, “Design and evaluation of an fbg sensor-based glove to simultaneously monitor flexure of ten finger joints,”IEEE Sensors J., vol. 21, no. 6, pp. 7620–7630, 2020
work page 2020
-
[17]
Scikit-learn: Machine learning in python,
F. Pedregosa, G. Varoquaux, A. Gramfort, V . Michel, B. Thirion, O. Grisel, M. Blondel, P. Prettenhofer, R. Weiss, V . Dubourg,et al., “Scikit-learn: Machine learning in python,”the Journal of machine Learning research, vol. 12, pp. 2825–2830, 2011
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.