Recognition: unknown
GSCompleter: A Distillation-Free Plugin for Metric-Aware 3D Gaussian Splatting Completion in Seconds
Pith reviewed 2026-05-10 01:18 UTC · model grok-4.3
The pith
GSCompleter completes sparse-view 3D Gaussian Splatting scenes in seconds by lifting synthesized 2D references into metric 3D primitives.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that shifting from an iterative repair-then-distill loop to a generate-then-register pipeline, in which synthesized 2D references are lifted to metric-scale 3D primitives by a Stereo-Anchor mechanism and then integrated by ray-constrained registration, produces higher-quality 3DGS completion across three benchmarks, enhances baseline methods, and reaches new state-of-the-art performance without any distillation.
What carries the argument
The Stereo-Anchor mechanism that lifts synthesized 2D reference images into metric-scale 3D primitives, combined with Ray-Constrained Registration that places those primitives into the global scene context.
If this is right
- Superior 3DGS completion performance is obtained across three distinct benchmarks.
- Quality and efficiency of various existing baseline methods are improved without additional distillation training.
- New state-of-the-art results are achieved for metric-aware scene completion.
- Completion time drops to seconds because the workflow replaces iterative optimization with direct registration.
Where Pith is reading between the lines
- The registration-first strategy could be adapted to other sparse-input rendering pipelines that currently rely on optimization loops.
- In practice the method might allow shorter capture sessions for real-world 3D mapping tasks by tolerating fewer input views.
- Testing the approach on dynamic or large-scale scenes would reveal whether the Stereo-Anchor lift remains stable when synthesized references contain greater inconsistencies.
Load-bearing premise
The 2D reference images synthesized from the sparse views must be sufficiently plausible and geometrically consistent to be lifted into accurate metric-scale 3D primitives by the Stereo-Anchor without introducing new artifacts or scale errors.
What would settle it
Apply GSCompleter to the three reported benchmarks and measure whether the completed scenes show higher PSNR, lower geometric error on held-out views, and fewer visible artifacts than distillation-based baselines; failure to outperform would falsify the superiority claim.
Figures










read the original abstract
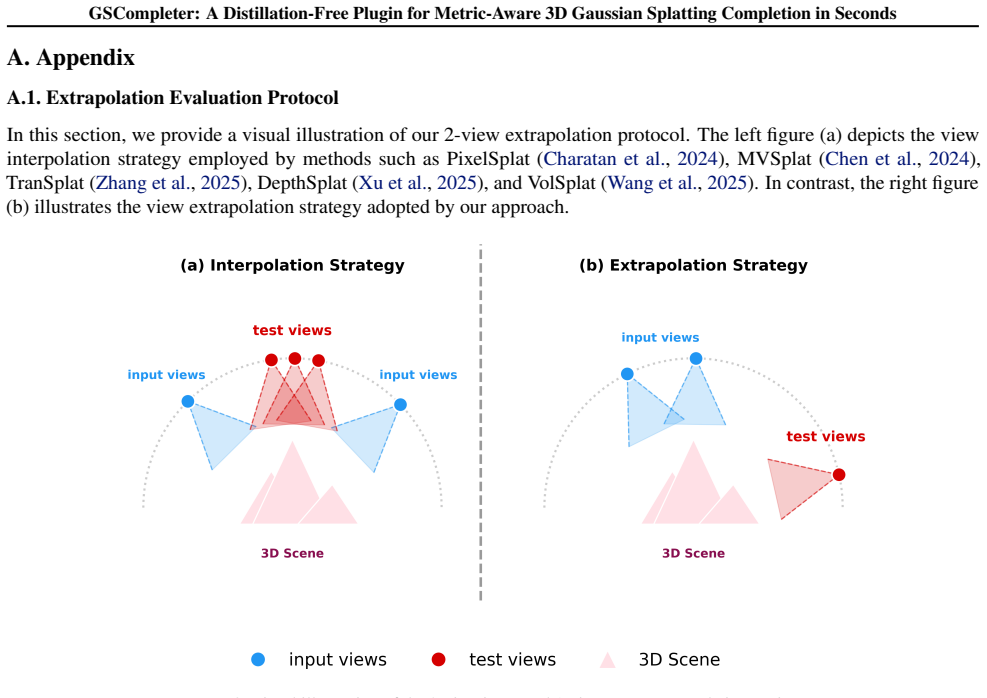
While 3D Gaussian Splatting (3DGS) has revolutionized real-time rendering, its performance degrades significantly under sparse-view extrapolation, manifesting as severe geometric voids and artifacts. Existing solutions primarily rely on an iterative "Repair-then-Distill" paradigm, which is inherently unstable and prone to overfitting. In this work, we propose GSCompleter, a distillation-free plugin that shifts scene completion to a stable "Generate-then-Register" workflow. Our approach first synthesizes plausible 2D reference images and explicitly lifts them into metric-scale 3D primitives via a robust Stereo-Anchor mechanism. These primitives are then seamlessly integrated into the global context through a novel Ray-Constrained Registration strategy. This shift to a rapid registration paradigm delivers superior 3DGS completion performance across three distinct benchmarks, enhancing the quality and efficiency of various baselines and achieving new SOTA results.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces GSCompleter, a distillation-free plugin for completing 3D Gaussian Splatting (3DGS) scenes under sparse-view extrapolation. It shifts from the unstable 'Repair-then-Distill' paradigm to a 'Generate-then-Register' workflow: plausible 2D reference images are synthesized, lifted into metric-scale 3D primitives via a Stereo-Anchor mechanism, and integrated into the global scene via Ray-Constrained Registration. The approach is claimed to enhance various baselines, run in seconds, and achieve new SOTA results across three distinct benchmarks.
Significance. If the core mechanisms hold, the work could meaningfully advance efficient 3D scene completion for real-time rendering by avoiding iterative overfitting. The plugin design and emphasis on metric awareness address practical limitations in current 3DGS pipelines, with potential benefits for applications requiring rapid completion from limited views.
major comments (2)
- [Stereo-Anchor mechanism (method section)] The central claim rests on the Stereo-Anchor successfully lifting synthesized 2D references into artifact-free metric 3D primitives without scale drift or new voids. This assumption is load-bearing for both the distillation-free advantage and the SOTA performance assertion, yet the manuscript provides insufficient validation (e.g., no quantitative view-consistency metrics or ablation on depth ambiguities in extrapolated views) to confirm the lifting step succeeds where prior methods fail.
- [Ray-Constrained Registration (method section)] The Ray-Constrained Registration strategy is presented as seamlessly integrating the lifted primitives, but without explicit analysis of how it handles potential geometric inconsistencies from the 2D synthesis step (e.g., in the registration equations or integration procedure), it is unclear whether the method truly recovers metric accuracy or simply masks residual errors.
minor comments (2)
- [Abstract] The abstract asserts SOTA results on three benchmarks but omits any quantitative metrics (PSNR, SSIM, completion-specific scores) or benchmark names, reducing immediate clarity for readers.
- [Introduction and method] Notation for 'metric-scale' and 'plausible 2D references' should be defined more precisely at first use to prevent ambiguity in later sections.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback on our manuscript. We address each major comment below, providing clarifications on the validation of our core mechanisms and committing to specific revisions that will strengthen the empirical support without altering the paper's claims.
read point-by-point responses
-
Referee: [Stereo-Anchor mechanism (method section)] The central claim rests on the Stereo-Anchor successfully lifting synthesized 2D references into artifact-free metric 3D primitives without scale drift or new voids. This assumption is load-bearing for both the distillation-free advantage and the SOTA performance assertion, yet the manuscript provides insufficient validation (e.g., no quantitative view-consistency metrics or ablation on depth ambiguities in extrapolated views) to confirm the lifting step succeeds where prior methods fail.
Authors: We appreciate the referee's emphasis on direct validation of the Stereo-Anchor lifting step. The SOTA results across three benchmarks (including metric-scale accuracy improvements over baselines) provide indirect but strong evidence that the lifting produces consistent, artifact-free primitives, as poor lifting would degrade downstream registration and rendering. However, we agree that explicit quantitative view-consistency metrics and targeted ablations would offer more granular confirmation. In the revised manuscript, we will add: (1) quantitative view-consistency metrics (e.g., multi-view PSNR/SSIM and depth variance on extrapolated regions) comparing Stereo-Anchor outputs to ground-truth and prior lifting methods; (2) an ablation isolating depth ambiguities in extrapolated views. These additions will directly demonstrate where Stereo-Anchor succeeds over alternatives. revision: yes
-
Referee: [Ray-Constrained Registration (method section)] The Ray-Constrained Registration strategy is presented as seamlessly integrating the lifted primitives, but without explicit analysis of how it handles potential geometric inconsistencies from the 2D synthesis step (e.g., in the registration equations or integration procedure), it is unclear whether the method truly recovers metric accuracy or simply masks residual errors.
Authors: We thank the referee for this point on analyzing inconsistency handling. The Ray-Constrained Registration explicitly projects lifted primitives onto rays originating from the original sparse views and optimizes under ray-based constraints (detailed in Equations 4-6 of the manuscript), which enforces geometric consistency and recovers metric scale rather than masking errors. This is evidenced by the consistent metric improvements in our benchmark results. To make this explicit, the revision will include: (1) expanded derivation and analysis in the method section showing how ray constraints mitigate synthesis-induced inconsistencies (with a new figure illustrating before/after error distributions); (2) additional quantitative results on depth error reduction pre- and post-registration. These changes will clarify the recovery mechanism. revision: yes
Circularity Check
No circularity in the derivation chain
full rationale
The paper describes a shift from 'Repair-then-Distill' to 'Generate-then-Register' using synthesized 2D references lifted via Stereo-Anchor and integrated via Ray-Constrained Registration. No equations, derivations, or self-referential reductions appear in the abstract or summary. The central claims rest on new mechanisms and empirical SOTA results across benchmarks rather than any fitted parameter renamed as prediction, self-definitional loop, or load-bearing self-citation chain. The derivation is self-contained against external benchmarks with no visible reduction of outputs to inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Communications of the ACM , volume=
Nerf: Representing scenes as neural radiance fields for view synthesis , author=. Communications of the ACM , volume=. 2021 , publisher=
2021
-
[2]
, author=
3d gaussian splatting for real-time radiance field rendering. , author=. ACM Trans. Graph. , volume=
-
[3]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Regnerf: Regularizing neural radiance fields for view synthesis from sparse inputs , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[4]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
pixelnerf: Neural radiance fields from one or few images , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[5]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Ibrnet: Learning multi-view image-based rendering , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[6]
Proceedings of the IEEE/CVF international conference on computer vision , pages=
Mvsnerf: Fast generalizable radiance field reconstruction from multi-view stereo , author=. Proceedings of the IEEE/CVF international conference on computer vision , pages=
-
[7]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Plenoxels: Radiance fields without neural networks , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[8]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
K-planes: Explicit radiance fields in space, time, and appearance , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[9]
ICCV , year=
Zip-NeRF: Anti-Aliased Grid-Based Neural Radiance Fields , author=. ICCV , year=
-
[10]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
pixelsplat: 3d gaussian splats from image pairs for scalable generalizable 3d reconstruction , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[11]
European conference on computer vision , pages=
Mvsplat: Efficient 3d gaussian splatting from sparse multi-view images , author=. European conference on computer vision , pages=. 2024 , organization=
2024
-
[12]
Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
Depthsplat: Connecting gaussian splatting and depth , author=. Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
-
[13]
arXiv preprint arXiv:2407.08236 , year=
FreeSplat: Generalizable 3D Gaussian Splatting with Geometric-Free Neural Rendering , author=. arXiv preprint arXiv:2407.08236 , year=
-
[14]
GGN: Generative Gaussian Networks for Efficient 3D Content Creation , author=. arXiv preprint arXiv:2405.19896 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[15]
arXiv preprint arXiv:2407.01575 , year=
SelfSplat: Self-supervised 3D Gaussian Splatting from Monocular Video , author=. arXiv preprint arXiv:2407.01575 , year=
-
[16]
Advances in neural information processing systems , volume=
Denoising diffusion probabilistic models , author=. Advances in neural information processing systems , volume=
-
[17]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
High-resolution image synthesis with latent diffusion models , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[18]
arXiv preprint arXiv:2310.10473 , year=
GDP: Generative Detail Painting for Text-guided Image Inpainting , author=. arXiv preprint arXiv:2310.10473 , year=
-
[19]
ICLR , year=
DiffBIR: Towards Blind Image Restoration with Generative Diffusion Models , author=. ICLR , year=
-
[20]
ACM Transactions on Graphics (ToG) , volume=
Realfill: Reference-driven generation for authentic image completion , author=. ACM Transactions on Graphics (ToG) , volume=. 2024 , publisher=
2024
-
[21]
Proceedings of the IEEE/CVF international conference on computer vision , pages=
Zero-1-to-3: Zero-shot one image to 3d object , author=. Proceedings of the IEEE/CVF international conference on computer vision , pages=
-
[22]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Zeronvs: Zero-shot 360-degree view synthesis from a single image , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[23]
Cat3D: Create anything in 3d with multi-view diffusion models
Cat3d: Create anything in 3d with multi-view diffusion models , author=. arXiv preprint arXiv:2405.10314 , year=
-
[24]
CVPR , year=
ReconFusion: 3D Reconstruction with Diffusion Priors , author=. CVPR , year=
-
[25]
Advances in Neural Information Processing Systems , volume=
3dgs-enhancer: Enhancing unbounded 3d gaussian splatting with view-consistent 2d diffusion priors , author=. Advances in Neural Information Processing Systems , volume=
-
[26]
Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
Genfusion: Closing the loop between reconstruction and generation via videos , author=. Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
-
[27]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Difix3d+: Improving 3d reconstructions with single-step diffusion models , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[28]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Dngaussian: Optimizing sparse-view 3d gaussian radiance fields with global-local depth normalization , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[29]
2025 International Conference on 3D Vision (3DV) , pages=
SparseGS: sparse view synthesis using 3D Gaussian splatting , author=. 2025 International Conference on 3D Vision (3DV) , pages=. 2025 , organization=
2025
-
[30]
arXiv preprint arXiv:2403.20309 (2024)
Instantsplat: Sparse-view gaussian splatting in seconds , author=. arXiv preprint arXiv:2403.20309 , year=
-
[31]
European conference on computer vision , pages=
Fsgs: Real-time few-shot view synthesis using gaussian splatting , author=. European conference on computer vision , pages=. 2024 , organization=
2024
-
[32]
European conference on computer vision , pages=
Coherentgs: Sparse novel view synthesis with coherent 3d gaussians , author=. European conference on computer vision , pages=. 2024 , organization=
2024
-
[33]
Forty-first International Conference on Machine Learning , year=
Gaussianpro: 3d gaussian splatting with progressive propagation , author=. Forty-first International Conference on Machine Learning , year=
-
[34]
European Conference on Computer Vision , pages=
Pixel-gs: Density control with pixel-aware gradient for 3d gaussian splatting , author=. European Conference on Computer Vision , pages=. 2024 , organization=
2024
-
[35]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Fregs: 3d gaussian splatting with progressive frequency regularization , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[36]
DreamFusion: Text-to-3D using 2D Diffusion
Dreamfusion: Text-to-3d using 2d diffusion , author=. arXiv preprint arXiv:2209.14988 , year=
work page internal anchor Pith review arXiv
-
[37]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Ri3d: Few-shot gaussian splatting with repair and inpainting diffusion priors , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[38]
arXiv preprint arXiv:2510.20385 (2025)
Positional encoding field , author=. arXiv preprint arXiv:2510.20385 , year=
-
[39]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Reggs: Unposed sparse views gaussian splatting with 3dgs registration , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[40]
European Conference on Computer Vision , pages=
Gaussreg: Fast 3d registration with gaussian splatting , author=. European Conference on Computer Vision , pages=. 2024 , organization=
2024
-
[41]
Volsplat: Rethinking feed-forward 3d gaussian splatting with voxel-aligned prediction , author=. arXiv preprint arXiv:2509.19297 , year=
-
[42]
ACM Transactions on Graphics (TOG) , volume=
Anysplat: Feed-forward 3d gaussian splatting from unconstrained views , author=. ACM Transactions on Graphics (TOG) , volume=. 2025 , publisher=
2025
-
[43]
arXiv preprint arXiv:2501.01949 , year=
Videolifter: Lifting videos to 3d with fast hierarchical stereo alignment , author=. arXiv preprint arXiv:2501.01949 , year=
-
[44]
2025 International Conference on 3D Vision (3DV) , pages=
Loopsplat: Loop closure by registering 3d gaussian splats , author=. 2025 International Conference on 3D Vision (3DV) , pages=. 2025 , organization=
2025
-
[45]
Sensor fusion IV: control paradigms and data structures , volume=
Method for registration of 3-D shapes , author=. Sensor fusion IV: control paradigms and data structures , volume=. 1992 , organization=
1992
-
[46]
2018 International Conference on 3D Vision (3DV) , pages=
Iterative global similarity points: A robust coarse-to-fine integration solution for pairwise 3d point cloud registration , author=. 2018 International Conference on 3D Vision (3DV) , pages=. 2018 , organization=
2018
-
[47]
IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=
Geotransformer: Fast and robust point cloud registration with geometric transformer , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=. 2023 , publisher=
2023
-
[48]
2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=
nerf2nerf: Pairwise registration of neural radiance fields , author=. 2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2023 , organization=
2023
-
[49]
arXiv preprint arXiv:2211.12544 , year=
Zero nerf: Registration with zero overlap , author=. arXiv preprint arXiv:2211.12544 , year=
-
[50]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Dreg-nerf: Deep registration for neural radiance fields , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[51]
2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Reg-nf: Efficient registration of implicit surfaces within neural fields , author=. 2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2024 , organization=
2024
-
[52]
IEEE Transactions on Visualization and Computer Graphics , year=
DeSC: Learning Deep Semantic Descriptor for NeRF Registration , author=. IEEE Transactions on Visualization and Computer Graphics , year=
-
[53]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Dl3dv-10k: A large-scale scene dataset for deep learning-based 3d vision , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[54]
Stereo Magnification: Learning View Synthesis using Multiplane Images
Stereo magnification: Learning view synthesis using multiplane images , author=. arXiv preprint arXiv:1805.09817 , year=
work page internal anchor Pith review arXiv
-
[55]
Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
Large scale multi-view stereopsis evaluation , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
-
[56]
IEEE transactions on image processing , volume=
Image quality assessment: from error visibility to structural similarity , author=. IEEE transactions on image processing , volume=. 2004 , publisher=
2004
-
[57]
Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
The unreasonable effectiveness of deep features as a perceptual metric , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
-
[58]
arXiv preprint arXiv:2409.01055 (2024)
Follow-your-canvas: Higher-resolution video outpainting with extensive content generation , author=. arXiv preprint arXiv:2409.01055 , year=
-
[59]
IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=
Unifying flow, stereo and depth estimation , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=. 2023 , publisher=
2023
-
[60]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Transplat: Generalizable 3d gaussian splatting from sparse multi-view images with transformers , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[61]
arXiv preprint arXiv:2503.13265 (2025)
FlexWorld: Progressively expanding 3D scenes for flexiable-view synthesis , author=. arXiv preprint arXiv:2503.13265 , year=
-
[62]
No pose, no problem: Surprisingly simple 3d gaussian splats from sparse unposed images , author=. arXiv preprint arXiv:2410.24207 , year=
-
[63]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Infinite nature: Perpetual view generation of natural scenes from a single image , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[64]
2025 International Conference on 3D Vision (3DV) , pages=
Flash3d: Feed-forward generalisable 3d scene reconstruction from a single image , author=. 2025 International Conference on 3D Vision (3DV) , pages=. 2025 , organization=
2025
-
[65]
FLUX.1 Kontext: Flow Matching for In-Context Image Generation and Editing in Latent Space
FLUX. 1 Kontext: Flow Matching for In-Context Image Generation and Editing in Latent Space , author=. arXiv preprint arXiv:2506.15742 , year=
work page internal anchor Pith review arXiv
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.