Recognition: unknown
ETac: A Lightweight and Efficient Tactile Simulation Framework for Learning Dexterous Manipulation
Pith reviewed 2026-05-10 00:39 UTC · model grok-4.3
The pith
ETac models elastomeric tactile sensor deformations with a lightweight data-driven approach that matches finite element accuracy while running fast enough for large-scale reinforcement learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
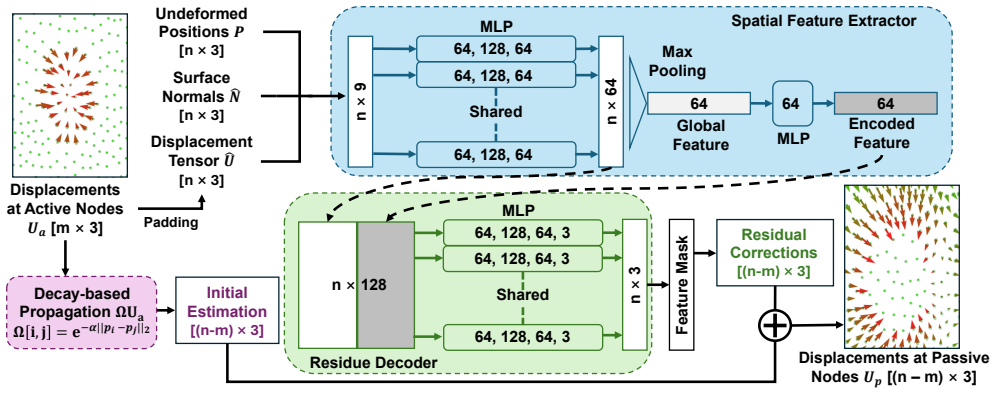
ETac employs a lightweight data-driven deformation propagation model to capture soft-body contact dynamics. When used as a simulation backend, it produces surface deformation estimates comparable to FEM and applies to modeling real tactile sensors. This enables training a blind grasping policy that uses large-area tactile feedback, achieving 84.45% average success rate across four object types at a throughput of 869 FPS over 4096 parallel environments on a single RTX 4090 GPU.
What carries the argument
The lightweight data-driven deformation propagation model, which approximates elastomeric soft-body interactions to enable efficient contact dynamics simulation.
If this is right
- It supports reinforcement learning training at scale for tactile-dependent manipulation skills.
- It demonstrates applicability for modeling real tactile sensors by matching FEM surface deformations.
- The framework achieves high efficiency with 869 FPS across 4096 environments while maintaining simulation quality.
- Resulting policies can manipulate diverse objects using blind grasping with tactile feedback.
Where Pith is reading between the lines
- The approach could extend to other soft-body simulation needs in robotics beyond tactile sensors.
- If the model generalizes well, it might reduce the need for expensive FEM computations in real-time robotic planning.
- Testing on a wider variety of object shapes and materials would reveal the limits of the data-driven approximation.
Load-bearing premise
The data-driven deformation model accurately generalizes from training data to real-world tactile sensors and new objects without significant errors in contact forces or deformations.
What would settle it
Compare the simulated surface deformations from ETac against actual measurements from a physical tactile sensor on objects not used in training; if the error exceeds that of FEM or leads to policy failure in real transfer, the claim does not hold.
Figures







read the original abstract
Tactile sensors are increasingly integrated into dexterous robotic manipulators to enhance contact perception. However, learning manipulation policies that rely on tactile sensing remains challenging, primarily due to the trade-off between fidelity and computational cost of soft-body simulations. To address this, we present ETac, a tactile simulation framework that models elastomeric soft-body interactions with both high fidelity and efficiency. ETac employs a lightweight data-driven deformation propagation model to capture soft-body contact dynamics, achieving high simulation quality and boosting efficiency that enables large-scale policy training. When serving as the simulation backend, ETac produces surface deformation estimates comparable to FEM and demonstrates applicability for modeling real tactile sensors. Then, we showcase its capability in training a blind grasping policy that leverages large-area tactile feedback to manipulate diverse objects. Running on a single RTX 4090 GPU, ETac supports reinforcement learning across 4,096 parallel environments, achieving a total throughput of 869 FPS. The resulting policy reaches an average success rate of 84.45% across four object types, underscoring ETac's potential to make tactile-based skill learning both efficient and scalable.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents ETac, a lightweight data-driven tactile simulation framework for modeling elastomeric soft-body contact dynamics. It claims that a propagation model yields surface deformations comparable to FEM while enabling high-throughput RL (869 FPS across 4096 parallel environments on a single RTX 4090), and demonstrates this via a blind grasping policy achieving 84.45% average success on four object types.
Significance. If the fidelity claims hold with quantified validation, ETac could address a key bottleneck in tactile RL by trading off simulation cost and accuracy, supporting large-scale policy training for contact-rich dexterous tasks. The reported parallel throughput and RL demonstration are concrete strengths that would be valuable if the underlying deformation model generalizes.
major comments (2)
- [Abstract] Abstract: the assertion that ETac 'produces surface deformation estimates comparable to FEM' lacks any quantitative support such as mean deformation error, contact force RMSE, or baseline comparisons; no validation dataset size, object geometries, or test conditions are specified. This directly undermines the central fidelity claim required for the RL results to be interpretable.
- [Experimental results] Experimental results (implied in the RL demonstration paragraph): the data-driven deformation propagation model is described as trained on interactions but provides no details on training data source, loss function, network architecture, or explicit tests for generalization to unseen curvatures, materials, or multi-contact scenarios. Without these, the 84.45% success rate cannot be distinguished from simulation-specific artifacts.
minor comments (1)
- [Abstract] The efficiency numbers (869 FPS, 4096 environments) are presented without breakdown of per-environment cost or comparison to alternative simulators; adding a table with these metrics would strengthen the efficiency claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will revise the paper to strengthen the presentation of quantitative validation and model training details.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that ETac 'produces surface deformation estimates comparable to FEM' lacks any quantitative support such as mean deformation error, contact force RMSE, or baseline comparisons; no validation dataset size, object geometries, or test conditions are specified. This directly undermines the central fidelity claim required for the RL results to be interpretable.
Authors: We agree that the abstract would benefit from explicit quantitative support. We will revise the abstract to incorporate key metrics from our validation experiments, including mean surface deformation error, contact force RMSE, baseline comparisons to FEM, validation dataset size, object geometries tested, and test conditions. These additions will make the fidelity claim more precise and directly support the interpretability of the RL results. revision: yes
-
Referee: [Experimental results] Experimental results (implied in the RL demonstration paragraph): the data-driven deformation propagation model is described as trained on interactions but provides no details on training data source, loss function, network architecture, or explicit tests for generalization to unseen curvatures, materials, or multi-contact scenarios. Without these, the 84.45% success rate cannot be distinguished from simulation-specific artifacts.
Authors: We acknowledge the need for greater transparency on the data-driven model. We will add a dedicated subsection detailing the training data source, loss function, network architecture of the propagation model, and explicit generalization tests across unseen curvatures, materials, and multi-contact scenarios. This will allow readers to better evaluate the 84.45% success rate and confirm it is not due to simulation artifacts. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper describes ETac as a data-driven deformation propagation model trained to approximate soft-body contact dynamics, with empirical claims of FEM-comparable surface estimates and downstream RL success rates (84.45% across objects at 869 FPS). No load-bearing step reduces by construction to its own inputs: the model is not self-defined via the target quantities, no fitted parameters are relabeled as independent predictions, and no uniqueness theorems or ansatzes are imported via self-citation chains. The derivation remains self-contained against external benchmarks (FEM comparisons and real-sensor applicability), with the RL throughput and success metrics arising from parallel execution rather than tautological reuse of training data.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Learning to grasp with- out seeing,
A. Murali, Y . Li, D. Gandhi, and A. Gupta, “Learning to grasp with- out seeing,” inInternational Symposium on Experimental Robotics, pp. 375–386, Springer, 2018
2018
-
[2]
Proprioceptive state estimation for amphibious tactile sensing,
N. Guo, X. Han, S. Zhong, Z. Zhou, J. Lin, J. S. Dai, F. Wan, and C. Song, “Proprioceptive state estimation for amphibious tactile sensing,”IEEE Transactions on Robotics, 2024
2024
-
[3]
Grasping in the dark: Compliant grasping using shadow dexterous hand and biotac tactile sensor,
K. Ganguly, B. Sadrfaridpour, K. B. Kidambi, C. Fermller, and Y . Aloi- monos, “Grasping in the dark: Compliant grasping using shadow dexterous hand and biotac tactile sensor,”arXiv e-prints, pages arXiv– 2011, 2020
2011
-
[4]
Embedding high-resolution touch across robotic hands enables adaptive human-like grasping,
Z. Zhao, W. Li, Y . Li, T. Liu, B. Li, M. Wang, K. Du, H. Liu, Y . Zhu, Q. Wang,et al., “Embedding high-resolution touch across robotic hands enables adaptive human-like grasping,”arXiv preprint arXiv:2412.14482, 2024
-
[5]
Robotsweater: Scalable, generalizable, and customizable machine-knitted tactile skins for robots,
Z. Si, T. C. Yu, K. Morozov, J. McCann, and W. Yuan, “Robotsweater: Scalable, generalizable, and customizable machine-knitted tactile skins for robots,” in2023 IEEE International Conference on Robotics and Automation (ICRA), pp. 10352–10358, IEEE, 2023
2023
-
[6]
Social gesture recognition in sphri: Leveraging fabric-based tactile sensing on humanoid robots,
D. Crowder, K. Vandyck, X. Sun, J. McCann, and W. Yuan, “Social gesture recognition in sphri: Leveraging fabric-based tactile sensing on humanoid robots,”arXiv preprint arXiv:2503.03234, 2025
-
[7]
A tactile sensing foot for single robot leg stabilization,
G. Zhang, Y . Du, Y . Zhang, and M. Y . Wang, “A tactile sensing foot for single robot leg stabilization,” in2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 14076–14082, IEEE, 2021
2021
-
[8]
Learning in-hand translation using tactile skin with shear and normal force sensing,
J. Yin, H. Qi, J. Malik, J. Pikul, M. Yim, and T. Hellebrekers, “Learning in-hand translation using tactile skin with shear and normal force sensing,”arXiv preprint arXiv:2407.07885, 2024
-
[9]
Tactile sensing in intelligent robotic manipulation–a review,
J. Tegin and J. Wikander, “Tactile sensing in intelligent robotic manipulation–a review,”Industrial Robot: An International Journal, vol. 32, no. 1, pp. 64–70, 2005
2005
-
[10]
Recent progress in tactile sensing and sensors for robotic manipulation: can we turn tactile sensing into vision?,
A. Yamaguchi and C. G. Atkeson, “Recent progress in tactile sensing and sensors for robotic manipulation: can we turn tactile sensing into vision?,”Advanced Robotics, vol. 33, no. 14, pp. 661–673, 2019
2019
-
[11]
Lessons from learning to spin" pens".arXiv preprint arXiv:2407.18902, 2024
J. Wang, Y . Yuan, H. Che, H. Qi, Y . Ma, J. Malik, and X. Wang, “Lessons from learning to spin” pens”,”arXiv preprint arXiv:2407.18902, 2024
-
[12]
Dextouch: Learning to seek and manipulate objects with tactile dexterity,
K.-W. Lee, Y . Qin, X. Wang, and S.-C. Lim, “Dextouch: Learning to seek and manipulate objects with tactile dexterity,”arXiv preprint arXiv:2401.12496, 2024
-
[13]
Affine body dynamics: Fast, stable & intersection-free simulation of stiff materials,
L. Lan, D. M. Kaufman, M. Li, C. Jiang, and Y . Yang, “Affine body dynamics: Fast, stable & intersection-free simulation of stiff materials,” arXiv preprint arXiv:2201.10022, 2022
-
[14]
Difftactile: A physics-based differentiable tactile simulator for contact-rich robotic manipulation,
Z. Si, G. Zhang, Q. Ben, B. Romero, Z. Xian, C. Liu, and C. Gan, “Difftactile: A physics-based differentiable tactile simulator for contact-rich robotic manipulation,”arXiv preprint arXiv:2403.08716, 2024
-
[15]
Efficient tactile simulation with differentiability for robotic manipulation,
J. Xu, S. Kim, T. Chen, A. R. Garcia, P. Agrawal, W. Matusik, and S. Sueda, “Efficient tactile simulation with differentiability for robotic manipulation,” inConference on Robot Learning, pp. 1488– 1498, PMLR, 2023
2023
-
[16]
Learning to walk in minutes using massively parallel deep reinforcement learning,
N. Rudin, D. Hoeller, P. Reist, and M. Hutter, “Learning to walk in minutes using massively parallel deep reinforcement learning,” in Conference on Robot Learning, pp. 91–100, PMLR, 2022
2022
-
[17]
Tacto: A fast, flexible, and open-source simulator for high-resolution vision-based tactile sensors,
S. Wang, M. Lambeta, P.-W. Chou, and R. Calandra, “Tacto: A fast, flexible, and open-source simulator for high-resolution vision-based tactile sensors,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3930–3937, 2022
2022
-
[18]
Taxim: An example-based simulation model for gelsight tactile sensors,
Z. Si and W. Yuan, “Taxim: An example-based simulation model for gelsight tactile sensors,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2361–2368, 2022
2022
-
[19]
TacSL: A library for visuotactile sensor simu- lation and learning
I. Akinola, J. Xu, J. Carius, D. Fox, and Y . Narang, “Tacsl: A library for visuotactile sensor simulation and learning,”arXiv preprint arXiv:2408.06506, 2024
-
[20]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Mack- lin, D. Hoeller, N. Rudin, A. Allshire, A. Handa,et al., “Isaac gym: High performance gpu-based physics simulation for robot learning,” arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review arXiv 2021
-
[21]
J. Zhao and E. H. Adelson, “Gelsight svelte hand: A three-finger, two-dof, tactile-rich, low-cost robot hand for dexterous manipulation,” ArXiv, vol. abs/2309.10886, 2023
-
[22]
B. Romero, H.-S. Fang, P. Agrawal, and E. H. Adelson, “Eyesight hand: Design of a fully-actuated dexterous robot hand with inte- grated vision-based tactile sensors and compliant actuation,”ArXiv, vol. abs/2408.06265, 2024
-
[23]
Rotating without seeing: Towards in-hand dexterity through touch,
Z.-H. Yin, B. Huang, Y . Qin, Q. Chen, and X. Wang, “Rotating without seeing: Towards in-hand dexterity through touch,”arXiv preprint arXiv:2303.10880, 2023
-
[24]
Robot synesthesia: In-hand manipulation with visuotactile sensing,
Y . Yuan, H. Che, Y . Qin, B. Huang, Z.-H. Yin, K.-W. Lee, Y . Wu, S.-C. Lim, and X. Wang, “Robot synesthesia: In-hand manipulation with visuotactile sensing,” in2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 6558–6565, IEEE, 2024
2024
-
[25]
Sequential dexterity: Chaining dexterous policies for long-horizon manipulation,
Y . Chen, C. Wang, L. Fei-Fei, and C. K. Liu, “Sequential dexterity: Chaining dexterous policies for long-horizon manipulation,” 2023
2023
-
[26]
Taccel: Scaling up vision-based tactile robotics via high- performance gpu simulation,
Y . Li, W. Du, C. Yu, P. Li, Z. Zhao, T. Liu, C. Jiang, Y . Zhu, and S. Huang, “Taccel: Scaling up vision-based tactile robotics via high- performance gpu simulation,”arXiv preprint arXiv:2504.12908, 2025
-
[27]
A moving least squares material point method with displacement discontinuity and two-way rigid body coupling,
Y . Hu, Y . Fang, Z. Ge, Z. Qu, Y . Zhu, A. Pradhana, and C. Jiang, “A moving least squares material point method with displacement discontinuity and two-way rigid body coupling,”ACM Transactions on Graphics (TOG), vol. 37, no. 4, pp. 1–14, 2018
2018
-
[28]
Chainqueen: A real-time differentiable physical simulator for soft robotics,
Y . Hu, J. Liu, A. Spielberg, J. B. Tenenbaum, W. T. Freeman, J. Wu, D. Rus, and W. Matusik, “Chainqueen: A real-time differentiable physical simulator for soft robotics,” in2019 International conference on robotics and automation (ICRA), pp. 6265–6271, IEEE, 2019
2019
-
[29]
Kaolin: A pytorch library for accelerating 3d deep learn- ing research
C. Fuji Tsang, M. Shugrina, J. F. Lafleche, T. Takikawa, J. Wang, and C. e. a. Loop, “Kaolin: A pytorch library for accelerating 3d deep learn- ing research.” https://github.com/NVIDIAGameWorks/kaolin, 2022
2022
-
[30]
Interaction of elastic bodies via surface forces: 2. exponential decay,
O. I. Vinogradova and F. Feuillebois, “Interaction of elastic bodies via surface forces: 2. exponential decay,”Journal of colloid and interface science, vol. 268, no. 2, pp. 464–475, 2003
2003
-
[31]
Pointnet: Deep learning on point sets for 3d classification and segmentation,
C. R. Qi, H. Su, K. Mo, and L. J. Guibas, “Pointnet: Deep learning on point sets for 3d classification and segmentation,” inProceedings of the IEEE conference on computer vision and pattern recognition, pp. 652–660, 2017
2017
-
[32]
Sim-to-real for robotic tactile sensing via physics-based simulation and learned latent projections,
Y . Narang, B. Sundaralingam, M. Macklin, A. Mousavian, and D. Fox, “Sim-to-real for robotic tactile sensing via physics-based simulation and learned latent projections,” in2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 6444–6451, IEEE, 2021
2021
-
[33]
Transferring tactile data across sensors,
W. Z. E. Amri, M. Kuhlmann, and N. Navarro-Guerrero, “Transferring tactile data across sensors,”arXiv preprint arXiv:2410.14310, 2024
-
[34]
Shadowrobot
“Shadowrobot.” https://www.shadowrobot.com/ dexterous-hand-series/
-
[35]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[36]
Unidexgrasp: Universal robotic dexterous grasping via learning diverse proposal generation and goal-conditioned policy,
Y . Xu, W. Wan, J. Zhang, H. Liu, Z. Shan, H. Shen, R. Wang, H. Geng, Y . Weng, J. Chen,et al., “Unidexgrasp: Universal robotic dexterous grasping via learning diverse proposal generation and goal-conditioned policy,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 4737–4746, 2023
2023
-
[37]
Twintac: A wide-range, highly sensitive tactile sen- sor with real-to-sim digital twin sensor model,
X. H. et al., “Twintac: A wide-range, highly sensitive tactile sen- sor with real-to-sim digital twin sensor model,”arXiv preprint arXiv:2509.10063, 2025
-
[38]
Attpnet: Attention- based deep neural network for 3d point set analysis,
Y . Yang, Y . Ma, J. Zhang, X. Gao, and M. Xu, “Attpnet: Attention- based deep neural network for 3d point set analysis,”Sensors, vol. 20, no. 19, p. 5455, 2020
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.