Approximate Simulation-based Hierarchical Control of Nonlinear Systems
Pith reviewed 2026-05-09 23:58 UTC · model grok-4.3
The pith
Nonlinear systems can be approximately controlled through a simpler abstract model by solving invariance equations to ensure output closeness and state relations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
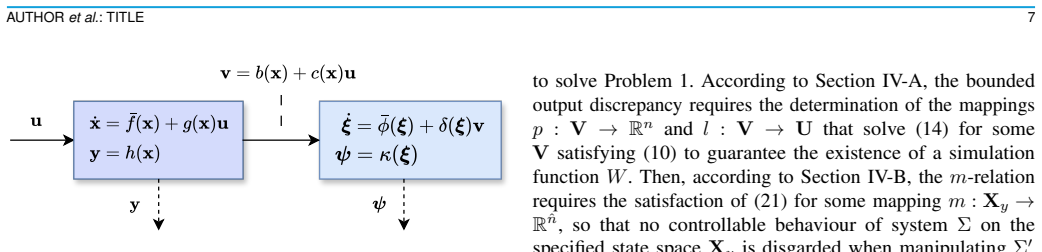
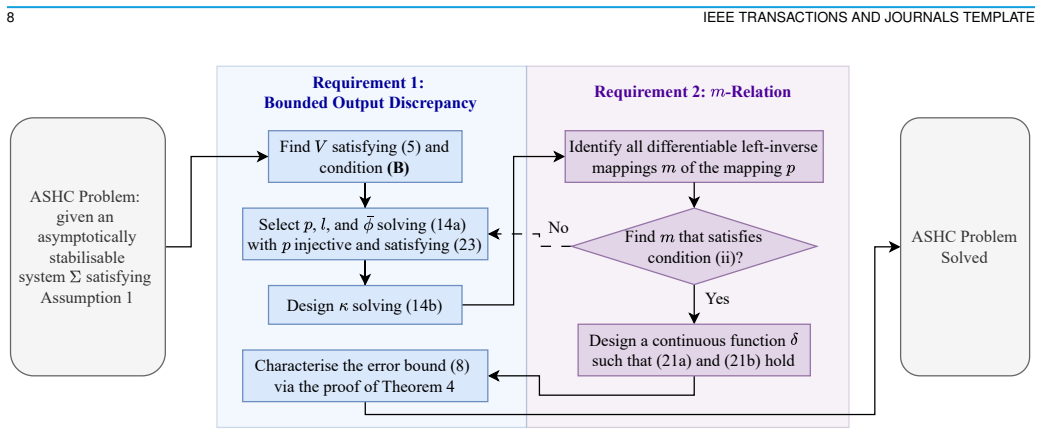
The authors establish that invariance equation-based methods achieve bounded output discrepancy and the m-relation for nonlinear systems, allowing construction of an abstract system whose control law transfers approximately to the original plant via an interface function, when solutions to the equations exist.
What carries the argument
Invariance equations that enforce bounded output discrepancy and the m-relation between abstract and concrete nonlinear systems.
If this is right
- If the invariance equations are solvable, a control law designed on the abstract system transfers to the nonlinear system with explicit approximation guarantees.
- Solvability conditions determine precisely when the ASHC technique succeeds for a given nonlinear system.
- The summarized design procedures allow step-by-step construction of the abstract model, interface, and controller for concrete plants such as power converters.
Where Pith is reading between the lines
- Numerical methods could be used to find approximate solutions to the invariance equations for systems where closed-form solutions are unavailable.
- The same abstraction idea might apply to control of systems with disturbances or parameter variations if the equations are modified accordingly.
- This constructive route suggests hierarchical control could become standard for many nonlinear engineering plants once solution existence is checked.
Load-bearing premise
The nonlinear system must admit solutions to the proposed invariance equations that achieve bounded output discrepancy and the m-relation.
What would settle it
A nonlinear system such as a modified Ćuk converter for which the invariance equations have no solutions, or for which the implemented interface produces output discrepancy larger than the predicted bound, would falsify the method.
Figures



read the original abstract
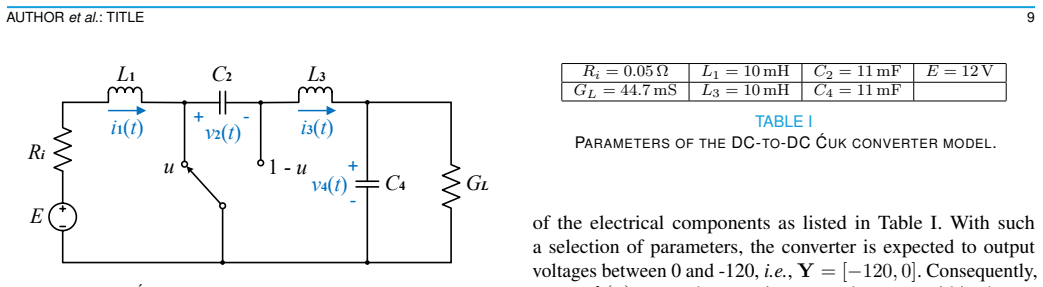
Controlling complex dynamical systems to satisfy sophisticated specifications remains a significant challenge in modern engineering. A promising approach to this problem is the approximate simulation-based hierarchical control (ASHC) technique. In this method, a simplified representation of the complex system, called the abstract system, is first designed and controlled. An interface function is then designed to translate the control law into the input of the complex system, thereby achieving approximate control synthesis. However, most existing results in ASHC are only for linear systems. This paper proposes a constructive method for solving the ASHC problem for nonlinear systems. To this end, we propose invariance equation-based methods to achieve the two classical requirements of the ASHC technique, namely the bounded output discrepancy and the $m$-relation. We then study the solvability conditions of the problem and summarise the overall design procedures. We illustrate the results with a practical example, providing step-by-step solutions to the ASHC problem of a DC-to-DC \'Cuk converter.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a constructive method for solving the approximate simulation-based hierarchical control (ASHC) problem for nonlinear systems. It introduces invariance equation-based methods to achieve the two classical requirements of bounded output discrepancy and the m-relation, studies the solvability conditions of these equations, summarizes the overall design procedures, and illustrates the results with a step-by-step application to the DC-to-DC Cuk converter.
Significance. If the invariance equations can be solved under the derived conditions to deliver both bounded output discrepancy and the m-relation, the work would meaningfully extend ASHC techniques beyond linear systems to nonlinear dynamics common in applications such as power electronics. The explicit study of solvability conditions and the detailed practical example on the Cuk converter provide both theoretical grounding and applied value.
minor comments (3)
- The m-relation is referenced in the abstract and introduction without a concise definition or pointer to its standard formulation in prior ASHC literature; a brief inline clarification would aid readers new to the framework.
- In the section presenting the solvability conditions, the manuscript should explicitly link each condition back to the two target properties (bounded discrepancy and m-relation) with a short proof sketch or reference to the relevant invariance equation, rather than leaving the connection implicit.
- The Cuk converter example would benefit from a short table or plot quantifying the achieved output discrepancy bound over the simulation horizon, directly confirming the theoretical guarantee in the numerical case.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript on approximate simulation-based hierarchical control for nonlinear systems, including the recognition of the invariance equation methods, solvability conditions, and the DC-DC converter example. The recommendation for minor revision is noted, and we will incorporate any minor improvements in the revised version.
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper develops a constructive procedure for ASHC of nonlinear systems by proposing invariance equation-based methods that target the standard requirements of bounded output discrepancy and the m-relation. Solvability conditions are studied separately, design procedures are summarized, and the method is demonstrated on the Cuk converter. No quoted step equates a claimed result to its own inputs by definition, renames a fitted quantity as a prediction, or relies on a self-citation chain whose prior result is itself unverified or tautological. The hinge assumption (existence of suitable invariance solutions) is an external condition on the plant rather than an internal redefinition, so the derivation chain remains independent.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Nonlinear systems admit invariance equation solutions achieving bounded output discrepancy and m-relation
Reference graph
Works this paper leans on
-
[1]
A. C. Antoulas,Approximation of large-scale dynamical systems. Philadelphia, USA: SIAM, 2005. AUTHORet al.: TITLE 13
work page 2005
-
[2]
Interconnection-based model order reduction - a survey,
G. Scarciotti and A. Astolfi, “Interconnection-based model order reduction - a survey,”Eur. J. Control, vol. 75, p. 100929, 2024
work page 2024
-
[3]
Hierarchical control system design using approximate simulation,
A. Girard and G. J. Pappas, “Hierarchical control system design using approximate simulation,”Automatica, vol. 45, no. 2, pp. 566–571, 2009
work page 2009
-
[4]
Compositional abstraction for networks of control systems: A dissipativity approach,
M. Zamani and M. Arcak, “Compositional abstraction for networks of control systems: A dissipativity approach,”IEEE Trans. Control Netw. Syst., vol. 5, no. 3, pp. 1003–1015, 2017
work page 2017
-
[5]
Compositional construction of approximate abstractions of interconnected control systems,
M. Rungger and M. Zamani, “Compositional construction of approximate abstractions of interconnected control systems,”IEEE Trans. Control Netw. Syst., vol. 5, no. 1, pp. 116–127, 2016
work page 2016
-
[6]
Approximate abstractions of control systems with an application to aggregation,
S. W. Smith, M. Arcak, and M. Zamani, “Approximate abstractions of control systems with an application to aggregation,”Automatica, vol. 119, p. 109065, 2020
work page 2020
-
[7]
Z. Song, V . Kurtz, S. Welikala, P. J. Antsaklis, and H. Lin, “Robust approximate simulation for hierarchical control of piecewise affine systems under bounded disturbances,” inProc. 41st Amer. Control Conf., 2022, pp. 1543–1548
work page 2022
-
[8]
Approximations of stochastic hybrid systems: A compositional approach,
M. Zamani, M. Rungger, and P. M. Esfahani, “Approximations of stochastic hybrid systems: A compositional approach,”IEEE Transactions on Automatic Control, vol. 62, no. 6, pp. 2838–2853, 2016
work page 2016
-
[9]
B. Zhong, M. Arcak, and M. Zamani, “Hierarchical control for cyber- physical systems via general approximate alternating simulation relations,” IFAC-PapersOnLine, vol. 58, no. 11, pp. 13–18, 2024
work page 2024
-
[10]
Hierarchical control via approximate simulation and feedback linearization,
J. Fu, S. Shah, and H. G. Tanner, “Hierarchical control via approximate simulation and feedback linearization,” inProc. 32nd Am. Control Conf., 2013, pp. 1816–1821
work page 2013
-
[11]
An approximate simulation approach to symbolic control,
P. Tabuada, “An approximate simulation approach to symbolic control,” IEEE Trans. Autom. Control, vol. 53, no. 6, pp. 1406–1418, 2008
work page 2008
-
[12]
Approximation metrics for discrete and continuous systems,
A. Girard and G. J. Pappas, “Approximation metrics for discrete and continuous systems,”IEEE Trans. Autom. Control, vol. 52, no. 5, pp. 782–798, 2007
work page 2007
-
[13]
W. H. Schilders, H. A. Van der V orst, and J. Rommes,Model order reduction: theory, research aspects and applications. Berlin, Heidelberg: Springer, 2008, vol. 13
work page 2008
-
[14]
Bridging abstraction-based hierarchical control and moment matching: A conceptual unification,
Z. Niu, M. F. Shakib, and G. Scarciotti, “Bridging abstraction-based hierarchical control and moment matching: A conceptual unification,” in Proc. 64th IEEE Conf. Decis. Control, 2025
work page 2025
-
[15]
G. Obinata and B. D. Anderson,Model reduction for control system design. Springer Science & Business Media, 2012
work page 2012
-
[16]
Finite-horizon minimal realizations for model predictive control of large-scale systems,
T. J. Meijer, S. A. N. Nouwens, V . S. Dolk, B. de Jager, and W. P. M. H. Heemels, “Finite-horizon minimal realizations for model predictive control of large-scale systems,” inProc. 61st IEEE Conf. Decis. Control, 2022, pp. 1136–1141
work page 2022
-
[17]
Use of reduced-order models in well control optimization,
J. D. Jansen and L. J. Durlofsky, “Use of reduced-order models in well control optimization,”Optim. Eng., vol. 18, no. 1, pp. 105–132, 2017
work page 2017
-
[18]
Forward completeness, unboundedness observability, and their Lyapunov characterizations,
D. Angeli and E. D. Sontag, “Forward completeness, unboundedness observability, and their Lyapunov characterizations,”Syst. Control Lett., vol. 38, no. 4-5, pp. 209–217, 1999
work page 1999
-
[19]
E. D. Sontag,Mathematical Control Theory: Deterministic Finite Dimensional Systems. Springer Science & Business Media, 2013, vol. 6
work page 2013
-
[20]
A Lyapunov approach to incremental stability properties,
D. Angeli, “A Lyapunov approach to incremental stability properties,” IEEE Trans. Autom. Control, vol. 47, no. 3, pp. 410–421, 2002
work page 2002
-
[21]
Milner,Communication and Concurrency
R. Milner,Communication and Concurrency. Prentice-Hall, Inc., 1989
work page 1989
-
[22]
Hierarchically consistent control systems,
G. J. Pappas, G. Lafferriere, and S. Sastry, “Hierarchically consistent control systems,”IEEE Trans. Autom. Control, vol. 45, no. 6, pp. 1144– 1160, 2000
work page 2000
-
[23]
Hierarchical trajectory refinement for a class of nonlinear systems,
P. Tabuada and G. J. Pappas, “Hierarchical trajectory refinement for a class of nonlinear systems,”Automatica, vol. 41, no. 4, pp. 701–708, 2005
work page 2005
-
[24]
A tutorial on incremental stability analysis using contraction theory,
J. Jouffroy and T. I. Fossen, “A tutorial on incremental stability analysis using contraction theory,”Model. Identif. Control, vol. 31, no. 3, p. 93, 2010
work page 2010
-
[25]
Model order reduction from data with certification,
B. Samari, A. Nejati, and A. Lavaei, “Model order reduction from data with certification,” inProc. 64th IEEE Conf. Decis. Control, 2025, pp. 5800–5805
work page 2025
-
[26]
D. Kalise and K. Kunisch, “Polynomial approximation of high- dimensional Hamilton–Jacobi–Bellman equations and applications to feedback control of semilinear parabolic PDEs,”SIAM J. Sci. Comput., vol. 40, no. 2, pp. A629–A652, 2018
work page 2018
-
[27]
D. Kalise, S. Kundu, and K. Kunisch, “Robust feedback control of nonlinear PDEs by numerical approximation of high-dimensional Hamilton–Jacobi–Isaacs equations,”SIAM J. Appl. Dyn. Syst., vol. 19, no. 2, pp. 1496–1524, 2020
work page 2020
-
[28]
On the approximation of moments for nonlinear systems,
N. Faedo, G. Scarciotti, A. Astolfi, and J. V . Ringwood, “On the approximation of moments for nonlinear systems,”IEEE Trans. Autom. Control, vol. 66, no. 11, pp. 5538–5545, 2021
work page 2021
-
[29]
A polynomial approximation scheme for nonlinear model reduction by moment matching,
C. Doebeli, A. Astolfi, D. Kalise, A. Moreschini, G. Scarciotti, and J. Simard, “A polynomial approximation scheme for nonlinear model reduction by moment matching,”arXiv preprint arXiv:2412.13371, 2024
-
[30]
Model reduction by moment matching for linear and nonlinear systems,
A. Astolfi, “Model reduction by moment matching for linear and nonlinear systems,”IEEE Trans. Autom. Control, vol. 55, no. 10, pp. 2321–2336, 2010
work page 2010
-
[31]
Nonlinear model reduction by moment matching,
G. Scarciotti and A. Astolfi, “Nonlinear model reduction by moment matching,”Found. Trends Syst. Control, vol. 4, no. 3-4, pp. 224–409, 2017
work page 2017
-
[32]
J. M. Lee,Introduction to Smooth Manifolds, 2nd ed. New York, NY , USA: Springer, 2012
work page 2012
-
[33]
Approximate bisimulation relations for constrained linear systems,
A. Girard and G. J. Pappas, “Approximate bisimulation relations for constrained linear systems,”Automatica, vol. 43, no. 8, pp. 1307–1317, 2007
work page 2007
- [34]
-
[35]
YALMIP: A toolbox for modeling and optimization in MATLAB,
J. L ¨ofberg, “YALMIP: A toolbox for modeling and optimization in MATLAB,” inProc. 13th IEEE Conf. Comput.-Aided Control Syst. Des., 2004. Zirui Niu(Graduate Student Member, IEEE) was born in Shandong, China. He received the B.Eng. (Hons) degree in electrical and electronic engineering from the University of Liverpool, UK, in 2020, and the M.Sc. degree in...
work page 2004
-
[36]
Since 2022, he has been pursuing a Ph.D. in control theory at Imperial College London, UK, supported by the CSC-Imperial Scholarship. His research interests include output regulation, hybrid systems, model reduction, approximate simulation of complex systems, and data-driven control. He was the recipient of the MSc Control Systems Outstanding Achievement ...
work page 2022
-
[37]
He is currently an Associate Professor in Control Theory at Imperial. He was a visiting scholar at New Y ork University in 2015, at Uni- versity of California Santa Barbara in 2016, and a Visiting Fellow of Shanghai University in 2021-2022. He is the recipient of an Imperial College Junior Research Fellowship (2016), of the IET Control & Automation PhD Aw...
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.