Recognition: unknown
A Survey of Legged Robotics in Non-Inertial Environments: Past, Present, and Future
Pith reviewed 2026-05-09 23:53 UTC · model grok-4.3
The pith
Legged robots lose reliability when the ground moves, tilts, or accelerates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
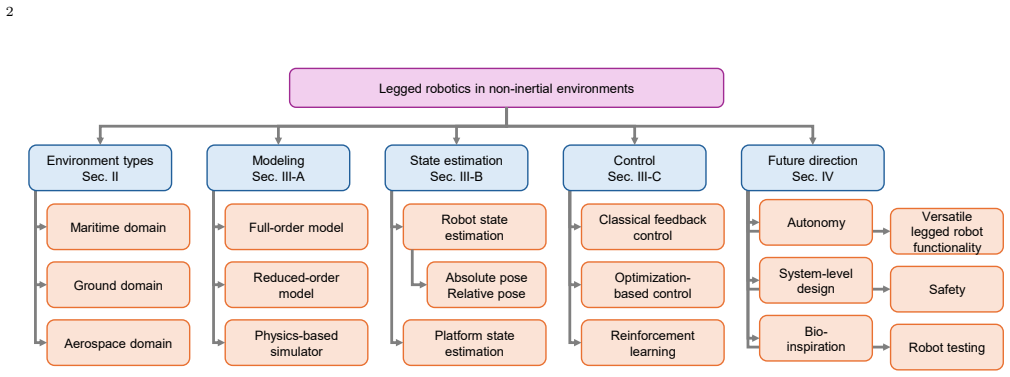
Existing methods for legged locomotion rely on stationary-ground assumptions that do not hold when the platform undergoes time-varying motion; as a result, performance degrades because disturbance forces and base accelerations are not fully accounted for in models, estimators, or controllers. The survey catalogs representative domains such as maritime platforms and ground transportation, traces the physical causes of failure, and shows that current solutions often assume slow platform changes or perfect motion knowledge. It concludes that progress requires explicit robot-environment coupling, better observability of external disturbances, and more rigorous experimental validation.
What carries the argument
The framework of robot-environment coupling that treats platform motion as an explicit, time-varying disturbance rather than an external disturbance to be rejected.
If this is right
- Explicit inclusion of platform dynamics in the robot model reduces unmodeled forces that currently destabilize gait.
- State estimators that recover both robot and platform states improve disturbance rejection without external references.
- Controllers that treat coupling forces as measurable inputs rather than noise increase robustness on moving bases.
- System-level designs that co-optimize leg and platform parameters can reduce the severity of disturbances at the source.
- Standardized experimental protocols on dynamic test rigs would allow direct comparison of methods that are now mostly simulated.
Where Pith is reading between the lines
- Methods developed for non-inertial legged robots may transfer to wheeled or tracked vehicles on the same platforms if the coupling analysis is generalized.
- Safety standards for human-carrying robots on ships or aircraft will likely need new metrics that include platform-induced falls.
- Bio-inspired strategies mentioned in the survey could be tested by comparing energy use on fixed versus accelerating treadmills.
Load-bearing premise
The collected papers and their reported limitations are representative of the full range of current methods and their real shortcomings.
What would settle it
A controlled experiment in which a legged robot maintains stable walking on a platform undergoing rapid, unpredictable acceleration or tilt while using only onboard sensors and without pre-planned knowledge of the platform trajectory.
Figures



read the original abstract
Legged robots have demonstrated remarkable agility on rigid, stationary ground, but their locomotion reliability remains limited in non-inertial environments, where the supporting ground moves, tilts, or accelerates. Such conditions arise in ground transportation, maritime platforms, and aerospace settings, and they introduce persistent time-varying disturbances that break the stationary-ground assumptions underlying conventional legged locomotion. This survey reviews the state of the art in modeling, state estimation, and control for legged robots in non-inertial environments. We summarize representative application domains and motion characteristics, analyze the root causes of locomotion performance degradation, and review existing methods together with their key assumptions and limitations. We further identify open problems in robot-environment coupling, observability, robustness, and experimental validation, and discuss future directions in autonomy, system-level design, bio-inspired strategies, safety, and testing. The survey aims to clarify the technical foundations of this emerging area and support the development of reliable legged robots for real-world dynamic environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript is a survey reviewing the state of the art in modeling, state estimation, and control for legged robots in non-inertial environments (e.g., moving, tilting, or accelerating ground in transportation, maritime, and aerospace settings). It summarizes representative application domains and motion characteristics, analyzes root causes of locomotion performance degradation due to time-varying disturbances that violate stationary-ground assumptions, reviews existing methods along with their key assumptions and limitations, identifies open problems in robot-environment coupling, observability, robustness, and experimental validation, and discusses future directions in autonomy, system-level design, bio-inspired strategies, safety, and testing.
Significance. If the coverage is representative, the survey will be significant for clarifying technical foundations in this emerging area and supporting development of reliable legged robots for dynamic real-world environments. A strength is the explicit, structured identification of open problems and the analysis of method limitations without internal contradictions or unsubstantiated assertions, which can guide targeted future research.
minor comments (2)
- The abstract and introduction refer to 'representative application domains' but the manuscript would benefit from an explicit statement (e.g., in the applications section) of the literature search criteria or inclusion thresholds used to ensure balanced coverage.
- Notation for non-inertial reference frames and disturbance models could be standardized with a dedicated table or glossary early in the modeling section to improve readability across the estimation and control reviews.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our survey and for recommending minor revision. The referee's summary accurately reflects the manuscript's scope, structure, and contributions regarding legged robotics in non-inertial environments.
Circularity Check
No significant circularity in this literature survey
full rationale
This is a survey paper that reviews modeling, estimation, and control methods for legged robots in non-inertial environments, summarizes application domains, analyzes performance degradation causes, and identifies open problems. No original derivations, equations, fitted parameters, or predictions are presented that could reduce to self-referential inputs. Claims rest on external reviewed literature rather than internal constructions, self-citations as load-bearing premises, or renamed empirical patterns. The reader's assessment of zero circularity risk is consistent with the absence of any load-bearing steps that match the enumerated patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Dickens, 2023 Public Transportation Fact Book
M. Dickens, 2023 Public Transportation Fact Book. American Public Transportation Association, 2024
2023
-
[2]
[Online]
(2025) Shipping data: UNCTAD releases new seaborne trade statistics. [Online]. A vailable: https://unctad.org/news/ shipping-data-unctad-releases-new-seaborne-trade-statistics
2025
-
[3]
(2025) 2024 global source passenger market report
CLIA. (2025) 2024 global source passenger market report. [Online]. A vailable: https://cruising.org/resources/ 2024-global-source-passenger-market-report
2025
-
[4]
[Online]
(2024) Iata annual safety report executive summary. [Online]. A vailable: https://www.iata.org/en/publications/ safety-report/executive-summary/
2024
-
[5]
Singapore airlines flight puts focus on rising turbulence danger,
B. Katz, J. Emont, and F. Solomon, “Singapore airlines flight puts focus on rising turbulence danger,” Wall Street J., May 2024
2024
-
[6]
Experimental evaluation of commercial quadruped robots: stability and performance in non-inertial environments,
S. Misenti et al., “Experimental evaluation of commercial quadruped robots: stability and performance in non-inertial environments,” Int. J. Intell. Robot. Appl., pp. 1–26, 2025
2025
-
[7]
Time-varying foot placement control for humanoid walking on swaying rigid surface,
Y. Gao et al., “Time-varying foot placement control for humanoid walking on swaying rigid surface,” IEEE Trans. Robotics, vol. 41, pp. 5740–5760, 2025
2025
-
[8]
Dynamic walking: Toward agile and efficient bipedal robots,
J. Reher and A. D. Ames, “Dynamic walking: Toward agile and efficient bipedal robots,” Annu. Rev. Control Robot. Auton. Syst., vol. 4, no. 1, pp. 535–572, 2021
2021
-
[9]
Optimization-based control for dynamic legged robots,
P. M. Wensing et al., “Optimization-based control for dynamic legged robots,” IEEE Trans. Robotics, vol. 40, pp. 43–63, 2023
2023
-
[10]
Learning-based legged locomotion: State of the art and future perspectives,
S. Ha et al., “Learning-based legged locomotion: State of the art and future perspectives,” Int. J. Robot. Res., vol. 44, no. 8, pp. 1396–1427, 2025
2025
-
[11]
Evolution of humanoid locomotion control,
Y. Gu et al., “Evolution of humanoid locomotion control,” 2025, under review. [Online]. A vailable: https://www.thetracelab.com/uploads/1/1/3/0/113094493/ evolution_of_humanoid_locomotion_control_1203.pdf
2025
-
[12]
Autonomous robots for harsh environments: a holistic overview of current solutions and ongoing challenges,
C. Wong, E. Yang, X.-T. Yan, and D. Gu, “Autonomous robots for harsh environments: a holistic overview of current solutions and ongoing challenges,” Syst. Sci. Control Eng., vol. 6, no. 1, pp. 213–219, 2018
2018
-
[13]
Legged locomotion over irregular terrains: State of the art of human and robot performance,
A. Torres-Pardo et al., “Legged locomotion over irregular terrains: State of the art of human and robot performance,” Bioinspir. Biomim., vol. 17, no. 6, p. 061002, 2022
2022
-
[14]
Maneuvering on non-newtonian fluidic terrain: a survey of animal and bio- inspired robot locomotion techniques on soft yielding grounds,
S. Godon, M. Kruusmaa, and A. Ristolainen, “Maneuvering on non-newtonian fluidic terrain: a survey of animal and bio- inspired robot locomotion techniques on soft yielding grounds,” Front. Robot. AI., vol. 10, p. 1113881, 2023
2023
-
[15]
Underwater legged robotics: Review and perspec- tives,
G. Picardi, A. Astolfi, D. Chatzievangelou, J. Aguzzi, and M. Calisti, “Underwater legged robotics: Review and perspec- tives,” Bioinspir. Biomim., vol. 18, no. 3, p. 031001, 2023
2023
-
[16]
Review on space robotics: Toward top- level science through space exploration,
Y. Gao and S. Chien, “Review on space robotics: Toward top- level science through space exploration,” Sci. Robot., vol. 2, no. 7, p. eaan5074, 2017
2017
-
[17]
A comprehensive overview of control algorithms, sensors, actuators, and communication tools of autonomous all-terrain vehicles in agriculture,
H. Etezadi and S. Eshkabilov, “A comprehensive overview of control algorithms, sensors, actuators, and communication tools of autonomous all-terrain vehicles in agriculture,” Agri- culture, vol. 14, no. 2, p. 163, 2024
2024
-
[18]
Anymal robots inspecting petronas’ offshore plat- form,
ANYbotics, “Anymal robots inspecting petronas’ offshore plat- form,” https://www.youtube.com/watch?v=aymdpFsdgbA, 2020, youTube, [Online]
2020
-
[19]
Biped robot walking on high dynamic moving surface demo,
L. Dynamics, “Biped robot walking on high dynamic moving surface demo,” https://www.bilibili.com/video/ BV1AajkzJErG/, 2024, bilibili, [Online]
2024
-
[20]
Assessment of the road surface condition with longitudinal acceleration signal of the car body,
K. Prażnowski, J. Mamala, M. Śmieja, and M. Kupina, “Assessment of the road surface condition with longitudinal acceleration signal of the car body,” Sensors, vol. 20, no. 21, p. 5987, 2020
2020
-
[21]
Condition monitoring of railway track from car-body vibration using time–frequency analysis,
H. Tsunashima and R. Hirose, “Condition monitoring of railway track from car-body vibration using time–frequency analysis,” Veh. Syst. Dyn., vol. 60, no. 4, pp. 1170–1187, 11 2020
2020
-
[22]
Acceleration-deceleration behaviour of various vehicle types,
P. S. Bokare and A. K. Maurya, “Acceleration-deceleration behaviour of various vehicle types,” Transp. Res. Procedia, vol. 25, pp. 4733–4749, 2017
2017
-
[23]
Numerical analysis of six degrees of freedom motion response of trimaran semi-submersible ship,
M. B. S. Putrananda, A. Bahatmaka, W. Aryadi, B. A. Puteri, and C. I. Hutagalung, “Numerical analysis of six degrees of freedom motion response of trimaran semi-submersible ship,” Mekanika, vol. 24, no. 1, pp. 61–72, 2025
2025
-
[24]
Numerical simula- tion of the motion of a large scale unmanned surface vessel in high sea state waves,
S. Huang, W. Liu, W. Luo, and K. Wang, “Numerical simula- tion of the motion of a large scale unmanned surface vessel in high sea state waves,” J. Mar. Sci. Eng., vol. 9, no. 9, p. 982, 2021
2021
-
[25]
Motion response on the water ambulance ship,
A. Alamsyah et al., “Motion response on the water ambulance ship,” Int. J. Mar. Eng. Innov. Res., vol. 8, no. 1, 2023
2023
-
[26]
Normal and extreme aircraft accelerations and the effects on exposure to expiratory airborne contaminant inside commercial aircraft cabins,
H. A. Elmaghraby, Y. W. Chiang, and A. A. Aliabadi, “Normal and extreme aircraft accelerations and the effects on exposure to expiratory airborne contaminant inside commercial aircraft cabins,” Sci. Technol. Built Environ., vol. 26, no. 7, pp. 924– 927, 2020
2020
-
[27]
Research on safety assessment methods based on tasks for aircraft takeoff pitch attitude,
X. Zhang and Q. Wang, “Research on safety assessment methods based on tasks for aircraft takeoff pitch attitude,” Sci. Rep., vol. 15, no. 1, p. 18067, 2025
2025
-
[28]
The potential of flight simulation to support pilot training for mountain helicopter emergency medical services,
N. A. Watson, N. Fernandez, I. Owen, and M. D. White, “The potential of flight simulation to support pilot training for mountain helicopter emergency medical services,” Air Medical Journal, vol. 44, no. 5, pp. 386–389, 2025
2025
-
[29]
Whole-body vibration ex- perienced by pilots, passengers and crew in fixed-wing aircraft: A state-of-the-science review,
N. J. Mansfield and G. Aggarwal, “Whole-body vibration ex- perienced by pilots, passengers and crew in fixed-wing aircraft: A state-of-the-science review,” Vibration, vol. 5, no. 1, pp. 110– 120, 2022
2022
-
[30]
Contingency model predictive control for bipedal locomotion on moving surfaces with a linear inverted pendulum model,
K. Chen, X. Huang, X. Chen, and J. Yi, “Contingency model predictive control for bipedal locomotion on moving surfaces with a linear inverted pendulum model,” in Proc. Amer. Control Conf., 2024, pp. 3166–3171
2024
-
[31]
Hu- manoidbench: Simulated humanoid benchmark for whole-body locomotion and manipulation
C. Sferrazza, D.-M. Huang, X. Lin, Y. Lee, and P. Abbeel, “Humanoidbench: Simulated humanoid benchmark for whole-body locomotion and manipulation,” arXiv preprint arXiv:2403.10506, 2024
-
[32]
Learning-based adaptive control of quadruped robots for active stabilization on moving platforms,
M. Yoon, H. Shin, J. Jeong, and S.-E. Yoon, “Learning-based adaptive control of quadruped robots for active stabilization on moving platforms,” in Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2024, pp. 701–708
2024
-
[33]
Learning skateboarding for humanoid robots through massively parallel reinforcement learning,
W. Thibault, V. Rajendran, W. Melek, and K. Mom- baur, “Learning skateboarding for humanoid robots through massively parallel reinforcement learning,” arXiv preprint arXiv:2409.07846, 2024
-
[34]
Learning a contact-adaptive controller for robust, efficient legged locomotion,
X. Da et al., “Learning a contact-adaptive controller for robust, efficient legged locomotion,” in Proc. Conf. Robot Learn., 2021, pp. 883–894
2021
-
[35]
Robust-locomotion-by-logic: Perturbation- resilient bipedal locomotion via signal temporal logic guided model predictive control,
Z. Gu et al., “Robust-locomotion-by-logic: Perturbation- resilient bipedal locomotion via signal temporal logic guided model predictive control,” IEEE Trans. Robotics, vol. 41, pp. 4300–4321, 2025
2025
-
[36]
Dreureka: Language model guided sim-to-real transfer,
J. Ma et al., “Dreureka: Language model guided sim-to-real transfer,” in Proc. Robotics: Sci. Syst., 2024
2024
-
[37]
Time- varying ALIP model and robust foot-placement control for underactuated bipedal robotic walking on a swaying rigid surface,
Y. Gao, Y. Gong, V. Paredes, A. Hereid, and Y. Gu, “Time- varying ALIP model and robust foot-placement control for underactuated bipedal robotic walking on a swaying rigid surface,” in Proc. Amer. Control Conf., 2023, pp. 3282–3287
2023
-
[38]
Contractionppo: Certified reinforcement learning via differentiable contraction layers,
V. Zinage, N. Harutyunyan, E. Verheyden, F. Y. Hadaegh, and S.-J. Chung, “Contractionppo: Certified reinforcement learning via differentiable contraction layers,” arXiv preprint arXiv:2603.19632, 2026
-
[39]
DCM-based dynamic stable walking under terrain-induced time-varying disturbances for humanoid robots,
Y. Luo, C. Liu, J. Wu, Z. Xiong, and H. Ding, “DCM-based dynamic stable walking under terrain-induced time-varying disturbances for humanoid robots,” Sci. China Technol. Sci., vol. 68, no. 4, p. 1420301, 2025
2025
-
[40]
Zero dynamics, pendulum models, and angular momentum in feedback control of bipedal locomo- tion,
Y. Gong and J. W. Grizzle, “Zero dynamics, pendulum models, and angular momentum in feedback control of bipedal locomo- tion,” J. Dyn. Syst. Meas. Control, vol. 144, no. 12, p. 121006, 2022
2022
-
[41]
Discrete- time hybrid automata learning: Legged locomotion meets skateboarding,
H. Liu, S. Teng, B. Liu, W. Zhang, and M. Ghaffari, “Discrete- time hybrid automata learning: Legged locomotion meets skateboarding,” arXiv preprint arXiv:2503.01842, 2025
-
[42]
Provably stabilizing controllers for quadrupedal robot locomotion on dynamic rigid platforms,
A. Iqbal, Y. Gao, and Y. Gu, “Provably stabilizing controllers for quadrupedal robot locomotion on dynamic rigid platforms,” IEEE/ASME Trans. Mechatronics, vol. 25, no. 4, pp. 2035– 2044, 2020
2035
-
[43]
The 3d linear inverted pendulum mode: A simple modeling for a biped walking pattern generation,
S. Kajita, F. Kanehiro, K. Kaneko, K. Yokoi, and H. Hirukawa, “The 3d linear inverted pendulum mode: A simple modeling for a biped walking pattern generation,” in Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2001, pp. 239–246
2001
-
[44]
3-d underactuated bipedal walking via h-LIP based gait synthesis and stepping stabilization,
X. Xiong and A. Ames, “3-d underactuated bipedal walking via h-LIP based gait synthesis and stepping stabilization,” IEEE Trans. Robotics, vol. 38, no. 4, pp. 2405–2425, 2022. 14
2022
-
[45]
Unified motion planner for walking, running, and jumping using the three-dimensional divergent component of motion,
G. Mesesan, R. Schuller, J. Englsberger, C. Ott, and A. Albu- Schäffer, “Unified motion planner for walking, running, and jumping using the three-dimensional divergent component of motion,” IEEE Trans. Robotics, vol. 39, no. 6, pp. 4443–4463, 2023
2023
-
[46]
State estimation for legged robots- consistent fusion of leg kinematics and imu,
M. Bloesch et al., “State estimation for legged robots- consistent fusion of leg kinematics and imu,” Robotics, vol. 17, pp. 17–24, 2013
2013
-
[47]
Contact-aided invariant extended kalman filtering for robot state estimation,
R. Hartley, M. Ghaffari, R. M. Eustice, and J. W. Grizzle, “Contact-aided invariant extended kalman filtering for robot state estimation,” Int. J. Robot. Res., vol. 39, no. 4, pp. 402– 430, 2020
2020
-
[48]
Vilens: Visual, inertial, lidar, and leg odometry for all-terrain legged robots,
D. Wisth, M. Camurri, and M. Fallon, “Vilens: Visual, inertial, lidar, and leg odometry for all-terrain legged robots,” IEEE Trans. Robotics, vol. 39, no. 1, pp. 309–326, 2022
2022
-
[49]
Capturability-based pattern generation for walking with vari- able height,
S. Caron, A. Escande, L. Lanari, and B. Mallein, “Capturability-based pattern generation for walking with vari- able height,” IEEE Trans. Robotics, vol. 36, no. 2, pp. 517–536, 2019
2019
-
[50]
Reinforcement learning for versatile, dynamic, and robust bipedal locomotion control,
Z. Li et al., “Reinforcement learning for versatile, dynamic, and robust bipedal locomotion control,” Int. J. Robot. Res., vol. 44, no. 5, pp. 840–888, 2025
2025
-
[51]
Walking crowds on a shaky surface: stable walkers discover millennium bridge oscillations with and without pedestrian synchrony,
V. Joshi and M. Srinivasan, “Walking crowds on a shaky surface: stable walkers discover millennium bridge oscillations with and without pedestrian synchrony,” Biol. Lett., vol. 14, no. 10, p. 20180564, 2018
2018
-
[52]
Dynamic legged manipulation of a ball through multi-contact optimization,
C. Yang, B. Zhang, J. Zeng, A. Agrawal, and K. Sreenath, “Dynamic legged manipulation of a ball through multi-contact optimization,” in Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2020, pp. 7513–7520
2020
-
[53]
Quadratic programming for multirobot and task-space force control,
K. Bouyarmane, K. Chappellet, J. Vaillant, and A. Kheddar, “Quadratic programming for multirobot and task-space force control,” IEEE Trans. Robotics, vol. 35, no. 1, pp. 64–77, 2018
2018
-
[54]
E. R. Westervelt, J. W. Grizzle, C. Chevallereau, J. H. Choi, and B. Morris, Feedback Control of Dynamic Bipedal Robot Locomotion. CRC Press, 2018
2018
-
[55]
Modeling, analysis, and control of slip running on dynamic platforms,
A. Iqbal, Z. Mao, and Y. Gu, “Modeling, analysis, and control of slip running on dynamic platforms,” ASME L. Dy. Syst. Contr., vol. 1, no. 2, p. 021007, 2021
2021
-
[56]
Ball walker: A case study of humanoid robot locomotion in non-stationary environments,
Y. Zheng and K. Yamane, “Ball walker: A case study of humanoid robot locomotion in non-stationary environments,” in Proc. IEEE Int. Conf. Robot. Autom., 2011, pp. 2021–2028
2011
-
[57]
Balancing in dynamic, un- stable environments without direct feedback of environment information,
U. Nagarajan and K. Yamane, “Balancing in dynamic, un- stable environments without direct feedback of environment information,” IEEE Trans. Robotics, vol. 30, no. 5, pp. 1234– 1241, 2014
2014
-
[58]
Extended balance stabi- lization control for humanoid robot on rotational slope based on seesaw-inverted-pendulum model,
K. Kimura, K. Okada, and M. Inaba, “Extended balance stabi- lization control for humanoid robot on rotational slope based on seesaw-inverted-pendulum model,” Adv. Robot., vol. 35, no. 18, pp. 1116–1130, 2021
2021
-
[59]
Humanoids operating mobil- ity devices designed for humans: Experiments on a segway,
V. Rajendran and K. Mombaur, “Humanoids operating mobil- ity devices designed for humans: Experiments on a segway,” in Proc. Int. Conf. Climbing Walking Robots, 2024, pp. 219–224
2024
-
[60]
ZMP feedback balance control of humanoid in response to ground acceleration,
M. Konishi, K. Kojima, K. Okada, M. Inaba, and K. Kawasaki, “ZMP feedback balance control of humanoid in response to ground acceleration,” in Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2023, pp. 8525–8531
2023
-
[61]
Motion planning and feedback control for bipedal robots riding a snakeboard,
J. Anglingdarma, A. Agrawal, J. Morey, and K. Sreenath, “Motion planning and feedback control for bipedal robots riding a snakeboard,” in Proc. IEEE Int. Conf. Robot. Autom., 2021, pp. 2818–2824
2021
-
[62]
Modeling and control of stable limit cycle walking on floating island,
F. Asano, “Modeling and control of stable limit cycle walking on floating island,” in Proc. IEEE Int. Conf. Mechatronics, 2021, pp. 1–6
2021
-
[63]
Adaptive ankle torque control for bipedal humanoid walking on surfaces with unknown horizontal and vertical motion,
J. Stewart, I.-C. Chang, Y. Gu, and P. A. Ioannou, “Adaptive ankle torque control for bipedal humanoid walking on surfaces with unknown horizontal and vertical motion,” in Proc. Amer. Control Conf., 2025, pp. 4647–4652
2025
-
[64]
Analytical solution to a time- varying lip model for quadrupedal walking on a vertically oscillating surface,
A. Iqbal, S. Veer, and Y. Gu, “Analytical solution to a time- varying lip model for quadrupedal walking on a vertically oscillating surface,” Mechatronics, vol. 96, p. 103073, 2023
2023
-
[65]
Asymptotic stabilization of aperiodic trajectories of a hybrid-linear inverted pendulum walking on a vertically moving surface,
——, “Asymptotic stabilization of aperiodic trajectories of a hybrid-linear inverted pendulum walking on a vertically moving surface,” in Proc. Amer. Control Conf., 2023, pp. 3030– 3035
2023
-
[66]
Locomotion control of robot walking on moving surface with contingency model predictive control (MPC),
K. Chen, X. Huang, X. Chen, and J. Yi, “Locomotion control of robot walking on moving surface with contingency model predictive control (MPC),” in Modeling, Estimation, and Control Conference, 2024
2024
-
[67]
MuJoCo: A physics engine for model-based control,
E. Todorov, T. Erez, and Y. Tassa, “MuJoCo: A physics engine for model-based control,” in Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2012, pp. 5026–5033
2012
-
[68]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V. Makoviychuk et al., “Isaac gym: High performance gpu- based physics simulation for robot learning,” arXiv:2108.10470, 2021
work page internal anchor Pith review arXiv 2021
-
[69]
NVIDIA Isaac lab,
“NVIDIA Isaac lab,” https://developer.nvidia.com/isaac/lab, retrieved 2025
2025
-
[70]
Pybullet, a python module for physics simulation for games, robotics and machine learning,
E. Coumans and Y. Bai, “Pybullet, a python module for physics simulation for games, robotics and machine learning,” 2016
2016
-
[71]
Per-contact iteration method for solving contact dynamics,
J. Hwangbo, J. Lee, and M. Hutter, “Per-contact iteration method for solving contact dynamics,” IEEE Robot. Automat. Lett., vol. 3, no. 2, pp. 895–902, 2018
2018
-
[72]
Toward maritime robotic simulation in gazebo,
B. Bingham et al., “Toward maritime robotic simulation in gazebo,” in Proc. OCEANS Conf., 2019, pp. 1–10
2019
-
[73]
Legged robot running using a physics-data hybrid motion template,
W.-S. Yang, W.-C. Lu, and P.-C. Lin, “Legged robot running using a physics-data hybrid motion template,” IEEE Trans. Robotics, vol. 37, no. 5, pp. 1680–1695, 2021
2021
-
[74]
Learning agile and dynamic motor skills for legged robots,
J. Hwangbo et al., “Learning agile and dynamic motor skills for legged robots,” Sci. Robot., vol. 4, no. 26, p. eaau5872, 2019
2019
-
[75]
Daydreamer: World models for physical robot learning,
P. Wu, A. Escontrela, D. Hafner, P. Abbeel, and K. Goldberg, “Daydreamer: World models for physical robot learning,” in Proc. Conf. Robot Learn., 2023, pp. 2226–2240
2023
-
[76]
T. D. Barfoot, State Estimation for Robotics. Cambridge University Press, 2024
2024
-
[77]
Openvins: A research platform for visual-inertial estimation,
P. Geneva, K. Eckenhoff, W. Lee, Y. Yang, and G. Huang, “Openvins: A research platform for visual-inertial estimation,” in Proc. IEEE Int. Conf. Robot. Autom., 2020, pp. 4666–4672
2020
-
[78]
Vins-mono: A robust and ver- satile monocular visual-inertial state estimator,
T. Qin, P. Li, and S. Shen, “Vins-mono: A robust and ver- satile monocular visual-inertial state estimator,” IEEE Trans. Robotics, vol. 34, no. 4, pp. 1004–1020, 2018
2018
-
[79]
Advances in inference and representation for simul- taneous localization and mapping,
D. M. Rosen, K. J. Doherty, A. Terán Espinoza, and J. J. Leonard, “Advances in inference and representation for simul- taneous localization and mapping,” Annu. Rev. Control Robot. Auton. Syst., vol. 4, no. 1, pp. 215–242, 2021
2021
-
[80]
Carlone, A
L. Carlone, A. Kim, T. Barfoot, D. Cremers, and F. Dellaert, Eds., SLAM Handbook. From Localization and Mapping to Spatial Intelligence. Cambridge University Press, 2026
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.