Recognition: unknown
Multi-Agent Empowerment and Emergence of Complex Behavior in Groups
Pith reviewed 2026-05-09 23:32 UTC · model grok-4.3
The pith
Multi-agent empowerment leads agents to form organized groups in both coupled pairs and controllable flocks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
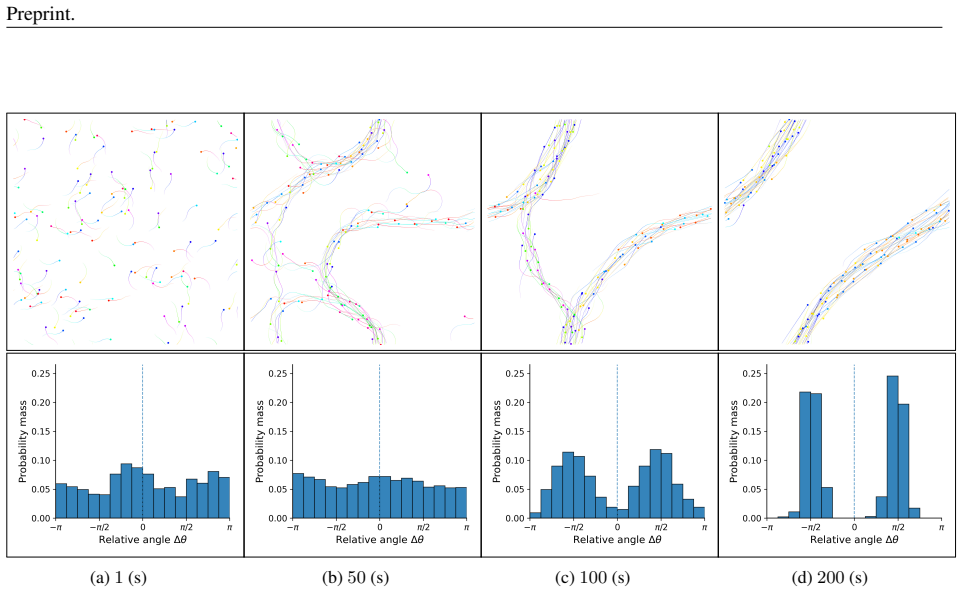
The authors formulate a principled multi-agent extension of empowerment and demonstrate that agents maximizing it produce distinct modes of group organization: coordinated pulling in the tendon environment and maintained cohesion with controllability in the Vicsek flock. This establishes that the intrinsic motivation can generate higher-level behavioral organization at scale.
What carries the argument
The multi-agent empowerment quantity, a group-level measure of mutual influence and future control that extends the single-agent version by accounting for joint actions and shared observations.
If this is right
- Agents in the tendon pair learn to synchronize movements to increase collective future options.
- Flock agents maintain alignment and adjust speeds to preserve group controllability.
- The same motivation can be used in larger groups without adding task-specific rewards.
- This approach separates the drive for organization from external engineering of rewards.
Where Pith is reading between the lines
- The same principle might be tested in physical robot collectives to check whether the organizations transfer beyond simulation.
- It suggests a route to studying how simple intrinsic drives produce division of labor or leadership in larger populations.
- Extensions to continuous control or noisy perception settings would test robustness of the group-level measure.
Load-bearing premise
The formulated multi-agent empowerment genuinely measures the group's intrinsic motivation and the observed organizations arise specifically from it rather than from the simulation details.
What would settle it
Running the same environments with agents that receive no empowerment signal or a different intrinsic reward and finding that the same group organizations still appear would falsify the claim that empowerment drives the behavior.
Figures




read the original abstract
Intrinsic motivations are receiving increasing attention, i.e. behavioral incentives that are not engineered, but emerge from the interaction of an agent with its surroundings. In this work we study the emergence of behaviors driven by one such incentive, empowerment, specifically in the context of more than one agent. We formulate a principled extension of empowerment to the multi-agent setting, and demonstrate its efficient calculation. We observe that this intrinsic motivation gives rise to characteristic modes of group-organization in two qualitatively distinct environments: a pair of agents coupled by a tendon, and a controllable Vicsek flock. This demonstrates the potential of intrinsic motivations such as empowerment to not just drive behavior for only individual agents but also higher levels of behavioral organization at scale.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript formulates a multi-agent extension of empowerment as an intrinsic motivation, demonstrates that its calculation remains efficient, and reports that this motivation produces characteristic group organizations in two distinct simulated environments: a pair of agents coupled by a tendon and a controllable Vicsek flock. The central claim is that empowerment can drive not only individual behavior but also higher-level collective organization at scale.
Significance. If the multi-agent formulation is a correct, non-circular extension of single-agent empowerment and the observed organizations are specifically attributable to the intrinsic term rather than environment-specific artifacts, the work would be a useful contribution to multi-agent systems and intrinsic-motivation research. The choice of two qualitatively different environments provides a basic robustness check, and the emphasis on efficient computation is a practical strength that could support further scaling studies.
minor comments (3)
- The abstract would be strengthened by including one or two quantitative metrics (e.g., order parameters, mutual-information values, or statistical significance of the observed organizations) so readers can immediately gauge the magnitude of the reported effects.
- Figure captions and legends should explicitly state the number of independent runs, the precise empowerment hyperparameters used, and any baseline comparisons (random actions, single-agent empowerment, etc.) to improve reproducibility.
- Notation for joint versus individual state-action spaces should be introduced once in a dedicated subsection and then used consistently; occasional shifts between single-agent and multi-agent symbols can confuse readers.
Simulated Author's Rebuttal
We thank the referee for their positive summary of the manuscript and for recommending minor revision. The referee accurately captures the core contributions: a principled multi-agent extension of empowerment, demonstration of its efficient computation, and the emergence of characteristic group organizations in two qualitatively distinct environments (tendon-coupled agents and controllable Vicsek flocks). We appreciate the recognition that the two-environment design provides a basic robustness check and that efficient computation is a practical strength. No specific major comments were provided in the report.
Circularity Check
No significant circularity identified
full rationale
The paper's central contribution is the formulation of a multi-agent extension of empowerment, presented as a new principled construction, followed by its application to two simulation environments (tendon-coupled agents and controllable Vicsek flock) to observe emergent group organizations. No load-bearing step reduces by construction to a fitted parameter, self-defined target, or self-citation chain; the extension is described as independent of the observed behaviors, and the behaviors are reported as arising from the intrinsic term rather than being presupposed by the equations. The derivation chain remains self-contained against external benchmarks, with no quoted reduction of predictions to inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Single-agent empowerment is a well-defined intrinsic motivation that can be extended to groups
Reference graph
Works this paper leans on
-
[1]
Philippe Capdepuy, Daniel Polani, and Chrystopher L Nehaniv
doi: 10.1109/ALIFE.2007.367798. Philippe Capdepuy, Daniel Polani, and Chrystopher L Nehaniv. Perception–action loops of multiple agents: in- formational aspects and the impact of coordination.Theory in Biosciences, 131(3):149–159,
-
[2]
doi: 10.1007/s12064-011-0143-y. A. Carleial. Interference channels.IEEE Transactions on Information Theory, 24(1):60–70,
-
[3]
doi: 10.1109/TIT. 1978.1055812. Andrea Cavagna and Irene Giardina. Bird flocks as condensed matter.Annual Review of Condensed Matter Physics, 5:183–207,
work page doi:10.1109/tit 1978
-
[4]
doi: 10.1146/annurev-conmatphys-031113-133834. Henry J. Charlesworth and Matthew S. Turner. Intrinsically motivated collective motion.Proceedings of the National Academy of Sciences, 116(31):15362–15367,
-
[5]
doi: 10.1073/pnas.1822069116. Iain D. Couzin. Collective cognition in animal groups.Trends in Cognitive Sciences, 13(1):36–43,
-
[6]
Thomas M Cover and Joy A Thomas.Elements of information theory
doi: 10.1016/j.tics.2008.10.002. Thomas M Cover and Joy A Thomas.Elements of information theory. John Wiley & Sons,
-
[7]
doi: 10.1103/physreve.106.034608
ISSN 2470-0053. doi: 10.1103/physreve.106.034608. Aviram Gelblum, Itai Pinkoviezky, Ehud Fonio, Abhijit Ghosh, Nir Gov, and Ofer Feinerman. Ant groups optimally amplify the effect of transiently informed individuals.Nature Communications, 6:7729,
-
[8]
Large Language Model based Multi-Agents: A Survey of Progress and Challenges
doi: 10.1038/ ncomms8729. 10 Preprint. Taicheng Guo, Xiuying Chen, Yaqi Wang, Ruidi Chang, Shichao Pei, Nitesh V Chawla, Olaf Wiest, and Xian- gliang Zhang. Large language model based multi-agents: A survey of progress and challenges.arXiv preprint arXiv:2402.01680,
work page internal anchor Pith review arXiv
-
[9]
doi: 10.1109/CEC.2005.1554676. Andrea J. Liu. Many more is different: A conversation with Andrea Liu. NITMB Interview,
-
[10]
doi: 10.1103/RevModPhys.85.1143. Nicholas T. Ouellette. A physics perspective on collective animal behavior.Physical Biology, 19(2):021004,
-
[11]
doi: 10.1088/1478-3975/ac4bef. Sriram Ramaswamy. The mechanics and statistics of active matter.Annual Review of Condensed Matter Physics, 1: 323–345,
-
[12]
doi: 10.1146/annurev-conmatphys-070909-104101. Craig W. Reynolds. Flocks, herds and schools: A distributed behavioral model. InProceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’87, pp. 25–34, New York, NY , USA,
-
[13]
Association for Computing Machinery. ISBN 0897912276. doi: 10.1145/37401.37406. Christoph Salge and Daniel Polani. Local information maximisation creates emergent flocking behaviour. In Tom Lenaerts, Mario Giacobini, Hugues Bersini, Paul Bourgine, Marco Dorigo, and Ren ´e Doursat (eds.),Advances in Artificial Life, ECAL 2011: Proceedings of the Eleventh E...
-
[14]
doi: 10.7551/978-0-262-29714-1-ch104
MIT Press. doi: 10.7551/978-0-262-29714-1-ch104. Christoph Salge and Daniel Polani. Empowerment as replacement for the three laws of robotics.Frontiers in Robotics and AI, 4:260425,
-
[15]
Christoph Salge, Cornelius Glackin, and Daniel Polani
doi: 10.3389/frobt.2017.00025. Christoph Salge, Cornelius Glackin, and Daniel Polani. Empowerment–an introduction. InGuided Self-Organization: Inception, Emergence, Complexity and Computation, pp. 67–114. Springer Berlin Heidelberg,
-
[16]
Stas Tiomkin, Christoph Salge, and Daniel Polani
doi: 10.1103/PRXLife.2.033009. Stas Tiomkin, Christoph Salge, and Daniel Polani. Process empowerment for robust intrinsic motivation.Journal of Physics: Complexity, 6(3):035011,
-
[17]
Khanh-Tung Tran, Dung Dao, Minh-Duong Nguyen, Quoc-Viet Pham, Barry O’Sullivan, and Hoang D
doi: 10.1088/2632-072x/adf2ec. Khanh-Tung Tran, Dung Dao, Minh-Duong Nguyen, Quoc-Viet Pham, Barry O’Sullivan, and Hoang D. Nguyen. Multi-agent collaboration mechanisms: A survey of llms,
-
[18]
doi: 10.1103/PhysRevLett.75.1226. Sergey V orotnikov, Konstantin Ermishin, Anaid Nazarova, and Arkady Yuschenko. Multi-agent robotic systems in collaborative robotics. InInternational Conference on Interactive Collaborative Robotics, pp. 270–279. Springer,
-
[19]
URLhttps://arxiv.org/abs/ 2502.15783. Wei Yu, Wonjong Rhee, S. Boyd, and J.M. Cioffi. Iterative water-filling for gaussian vector multiple-access channels. IEEE Transactions on Information Theory, 50(1):145–152,
-
[20]
doi: 10.1109/TIT.2003.821988. 11
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.