Recognition: unknown
When Altruism Meets Autonomy: Managing Bottleneck Congestion with Strategic Autonomous Vehicles
Pith reviewed 2026-05-10 15:17 UTC · model grok-4.3
The pith
Under selfish human lane choices, autonomous vehicle penetration improves weaving-ramp performance only at critical thresholds with flat plateaus in between.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In a mixed-autonomy weaving ramp, when human-driven vehicles follow a Wardrop equilibrium based on selfish lane choices, the system performance as a function of AV penetration rate is non-increasing and exhibits plateau regions; performance improves only when AV penetration reaches certain critical thresholds where the strategic AVs can induce better equilibria.
What carries the argument
The Stackelberg-Wardrop formulation in which autonomous vehicles act as leaders optimizing aggregate performance while human-driven vehicles adapt through Wardrop equilibrium.
Load-bearing premise
Human drivers always choose lanes to minimize only their own travel cost according to Wardrop equilibrium, while AVs can be instructed to prioritize overall system performance.
What would settle it
Traffic-flow measurements at a weaving ramp that show continuous improvement in throughput or delay for every incremental increase in AV penetration, without any flat regions.
Figures








read the original abstract
Weaving ramps are critical bottlenecks in highway networks due to conflicting traffic flows and complex interactions among heterogeneous vehicle types. In mixed-autonomy settings, the presence of controllable autonomous vehicles (AVs) introduces new opportunities to influence system-level outcomes, yet the structural impact of such control remains poorly understood. This paper develops a unified equilibrium framework to capture, predict, and optimize aggregate lane-choice behavior in weaving ramps with heterogeneous vehicle populations. We first formulate a Wardrop-based model capturing the selfish behavior of human-driven vehicles (HDVs) and establish existence, uniqueness, and validity of the resulting equilibrium. We then introduce a Stackelberg--Wardrop formulation in which AVs act as strategic leaders optimizing system performance, while HDVs respond through equilibrium adaptation. The framework is further generalized to incorporate heterogeneous behavioral preferences of HDVs and AVs via a Social Value Orientation (SVO) model. Our analysis reveals a fundamental structural property of mixed-autonomy traffic systems: under selfish HDV behavior, the impact of AV penetration is inherently non-increasing, exhibiting plateau regions where performance remains unchanged and improves only at critical thresholds. These results provide principled guidance for the design of AV control and incentive mechanisms in the presence of selfish human behavior, and demonstrate how strategically controlled autonomous agents can be deployed to induce system-level efficiency gains in mixed-autonomy transportation networks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a unified equilibrium framework for aggregate lane-choice behavior at weaving ramps under mixed human-driven vehicles (HDVs) and autonomous vehicles (AVs). It formulates a Wardrop model for selfish HDV lane choice and proves existence, uniqueness, and validity of the equilibrium. It then introduces a Stackelberg-Wardrop formulation in which AVs act as strategic leaders optimizing system performance while HDVs adapt via equilibrium. The model is generalized via a Social Value Orientation (SVO) parameterization for heterogeneous preferences. The central structural result is that, under selfish HDV behavior, the impact of AV penetration on system performance is non-increasing and exhibits plateau regions, with improvements occurring only at critical thresholds.
Significance. If the monotonicity property and equilibrium results hold under the stated assumptions on cost functions, the work provides principled guidance for AV control and incentive design in mixed-autonomy bottleneck settings. The identification of plateau regions and threshold behavior is a useful structural insight that extends standard Wardrop and Stackelberg concepts to heterogeneous vehicle populations. The framework's reliance on explicitly maintained monotonicity assumptions on costs is a strength for reproducibility of the qualitative claims.
major comments (1)
- [Abstract and §4] Abstract and §4 (Stackelberg-Wardrop extension): the non-increasing property and plateau behavior are asserted to hold under selfish HDV behavior, but the derivation appears to rely on the specific form of the cost functions and the Stackelberg leadership assumption; a concrete counter-example or boundary case where the property fails when monotonicity is relaxed would strengthen the claim that the result is structural rather than assumption-dependent.
minor comments (3)
- [Abstract] Abstract: the phrase 'validity of the resulting equilibrium' is imprecise; clarify whether it refers to stability, consistency with observed flows, or another property.
- [SVO generalization] SVO generalization section: the preservation of the non-increasing property under heterogeneous SVO parameters should be stated explicitly as a theorem or corollary rather than left as an extension remark.
- [Notation] Notation: ensure consistent use of symbols for penetration rate, equilibrium flows, and system cost across the Wardrop and Stackelberg formulations to avoid reader confusion.
Simulated Author's Rebuttal
We thank the referee for the constructive comment and positive evaluation of our framework. We address the concern point by point below and will revise the manuscript to strengthen the exposition of our structural results.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Stackelberg-Wardrop extension): the non-increasing property and plateau behavior are asserted to hold under selfish HDV behavior, but the derivation appears to rely on the specific form of the cost functions and the Stackelberg leadership assumption; a concrete counter-example or boundary case where the property fails when monotonicity is relaxed would strengthen the claim that the result is structural rather than assumption-dependent.
Authors: We agree that clarifying the dependence on monotonicity would improve the presentation. The non-increasing property and plateau behavior are proved in §4 under the standard assumption that lane-specific cost functions are strictly increasing in aggregate flows; this condition guarantees uniqueness of the Wardrop equilibrium for HDVs (see Theorem 1 in §3) and thereby makes performance comparisons across AV penetration rates well-defined. The Stackelberg leadership structure is part of the model definition rather than an auxiliary assumption. When monotonicity is relaxed, multiple HDV equilibria can coexist, so the notion of system performance in the Stackelberg-Wardrop game becomes set-valued and the monotonicity claim need not hold. In the revised §4 we will insert a short boundary-case example (two-lane weaving ramp with a non-monotonic cost segment) showing that equilibrium selection can produce non-monotonic performance changes with AV penetration. This addition will explicitly tie the structural result to the maintained monotonicity assumptions without altering the main theorems. revision: yes
Circularity Check
No significant circularity; derivation relies on external equilibrium concepts
full rationale
The paper formulates a Wardrop equilibrium model for selfish HDV lane choice and establishes its existence, uniqueness, and validity from monotonicity assumptions on cost functions (explicitly stated and independent of the target result). It then extends to a Stackelberg-Wardrop game with AVs as leaders and generalizes via SVO, deriving the non-increasing AV penetration impact (with plateaus and thresholds) as a structural consequence of the selfish HDV equilibrium under those assumptions. No load-bearing step reduces by construction to a fitted parameter, self-definition, or self-citation chain; all cited concepts (Wardrop, Stackelberg) are standard external references, and the central property is not renamed or smuggled in but proven from the model equations.
Axiom & Free-Parameter Ledger
axioms (2)
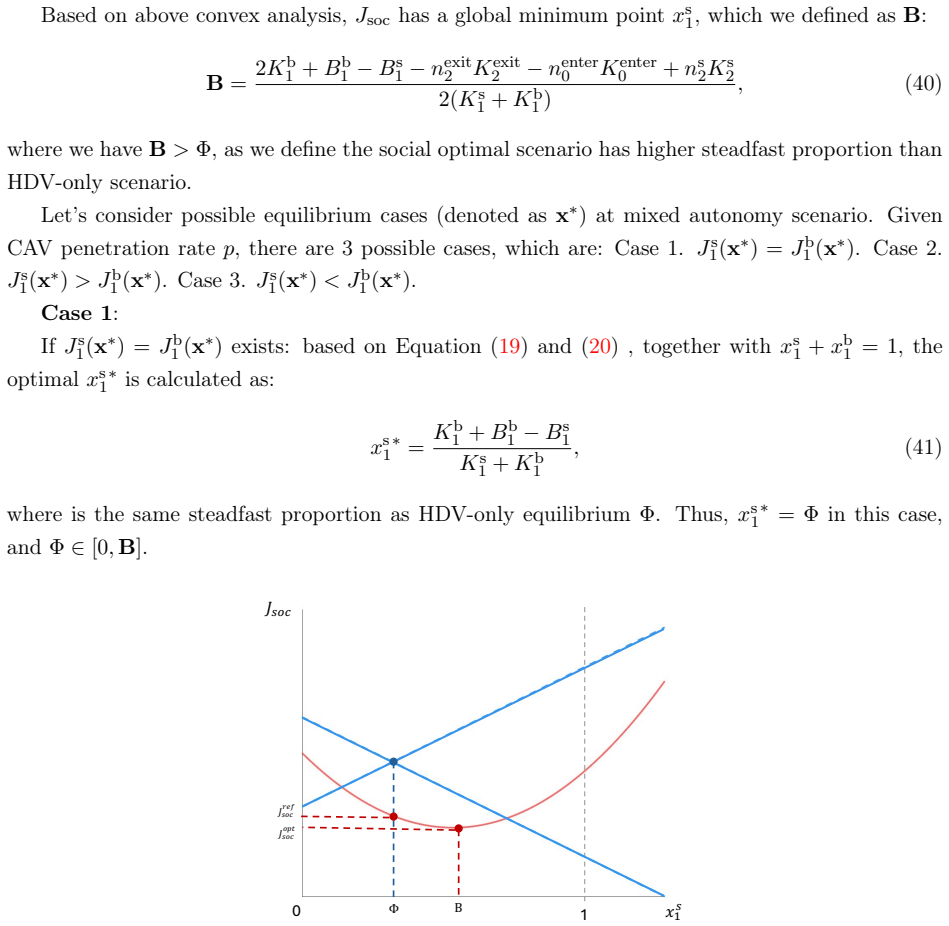
- domain assumption Human-driven vehicles exhibit selfish behavior captured by Wardrop equilibrium
- domain assumption Autonomous vehicles can be controlled as strategic leaders in a Stackelberg game
Reference graph
Works this paper leans on
-
[1]
Adebisi, A., Liu, Y., Schroeder, B., Ma, J., Cesme, B., Jia, A., and Morgan, A. (2020). Developing highway capacity manual capacity adjustment factors for connected and automated traffic on freeway segments. Transportation Research Record, 2674(10):401–415. Ao, D., Lai, Z., and Li, S. (2024). Control of dynamic ride-hailing networks with a mixed fleet of ...
-
[2]
Safe, Multi-Agent, Reinforcement Learning for Autonomous Driving
Springer Science & Business Media. 37 Rios-Torres, J. and Malikopoulos, A. A. (2016). A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps.IEEE Transactions on Intelligent Transporta- tion Systems, 18(5):1066–1077. Rodrigues, M., McGordon, A., Gest, G., and Marco, J. (2018). Autonomous navigatio...
work page Pith review arXiv 2016
-
[3]
Springer. Van Lange, P. A. (1999). The pursuit of joint outcomes and equality in outcomes: an integrative model of social value orientation.Journal of personality and social psychology, 77(2):337. Vinitsky, E., Kreidieh, A., Le Flem, L., Kheterpal, N., Jang, K., Wu, C., Wu, F., Liaw, R., Liang, E., and Bayen, A. M. (2018). Benchmarks for reinforcement lea...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.