Recognition: unknown
Wiggle and Go! System Identification for Zero-Shot Dynamic Rope Manipulation
Pith reviewed 2026-05-09 20:53 UTC · model grok-4.3
The pith
Identifying rope physics from wiggle observations allows zero-shot dynamic robotic manipulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
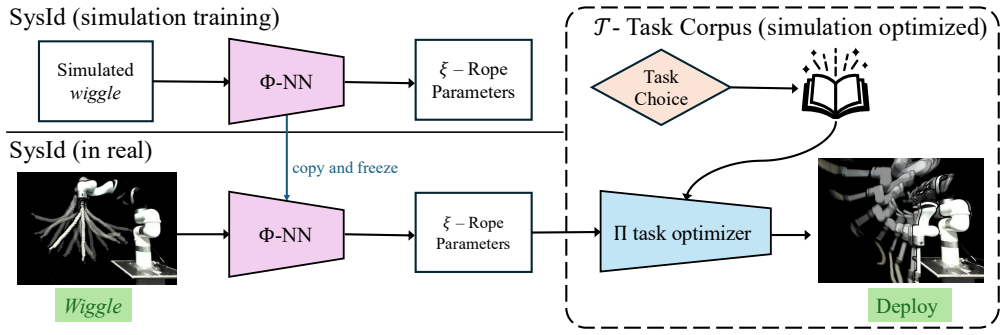
Learned simulation priors combined with a system identification module can predict descriptive physical parameters of a rope from limited wiggle observations; these parameters then inform a goal-conditioned optimization to generate robot actions that execute successfully zero-shot in the real world across different dynamic manipulation tasks.
What carries the argument
The system identification module, which observes rope movement to predict physical parameters that are used in an optimization method for action prediction.
Load-bearing premise
The simulation priors and system identification module can extract physical parameters from limited observations that generalize across different ropes, tasks, and real-world conditions.
What would settle it
A new rope or task where the predicted parameters cause the robot to miss the target by a large margin, such as over 10 cm on average, despite following the same procedure.
Figures




read the original abstract
Many robotic tasks are unforgiving; a single mistake in a dynamic throw can lead to unacceptable delays or unrecoverable failure. To mitigate this, we present a novel approach that leverages learned simulation priors to inform goal-conditioned dynamic manipulation of ropes for efficient and accurate task execution. Related methods for dynamic rope manipulation either require large real-world datasets to estimate rope behavior or the use of iterative improvements on attempts at the task for goal completion. We introduce Wiggle and Go!, a system-identification, two-stage framework that enables zero-shot task rope manipulation. The framework consists of a system identification module that observes rope movement to predict descriptive physical parameters, which then informs an optimization method for goal-conditioned action prediction for the robot to execute zero-shot in the real. Our method achieves strong performance across multiple dynamic manipulation tasks enabled by the same task-agnostic system identification module which offers seamless switching between different manipulation tasks, allowing a single model to support a diverse array of manipulation policies. We achieve a 3.55 cm average accuracy on 3D target striking in real using rope system parameters in comparison to 15.34 cm accuracy when our task model is not system-parameter-informed. We achieve a Pearson correlation coefficient of 0.95 between Fourier frequencies of the predicted and real ropes on an unseen trajectory. Project website please see https://wiggleandgo.github.io/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces 'Wiggle and Go!', a two-stage framework for zero-shot dynamic rope manipulation. A system-identification module observes limited 'wiggle' motions to predict rope physical parameters (mass, stiffness, damping, etc.) using learned simulation priors; these parameters then condition a goal-directed optimization that predicts robot actions for tasks such as 3D target striking. The approach is presented as task-agnostic, allowing the same identification module to support multiple manipulation policies without per-task retraining or iterative real-world adaptation. Reported results include 3.55 cm average accuracy on real-world 3D target striking (versus 15.34 cm for the non-parameter-informed baseline) and a Pearson correlation of 0.95 between predicted and observed Fourier frequencies on one unseen trajectory.
Significance. If the extracted parameters prove both accurate and transferable, the method would offer a practical route to data-efficient dynamic manipulation of deformable objects by combining modest real-world observations with simulation priors. The task-agnostic design is a clear strength, potentially extending to other soft-body or cable-driven tasks where full system identification from scratch is costly.
major comments (3)
- [Abstract / Results] Abstract and results: the headline claim that the system-ID module recovers 'descriptive physical parameters' enabling zero-shot transfer rests on a single 0.95 Pearson correlation between Fourier frequencies of predicted and real ropes on one unseen trajectory. This metric is only a weak proxy for whether the recovered values of mass, stiffness, or damping match real physics or generalize across ropes and tasks; no direct ground-truth comparison (e.g., measured mass or stiffness versus predicted values) is provided.
- [Results / Experiments] The 3.55 cm vs. 15.34 cm accuracy gap for 3D target striking is load-bearing for the central contribution, yet the manuscript does not report error bars, number of trials, or the precise construction of the non-informed baseline (identical optimization but with default or zeroed parameters?). Without these details it is impossible to determine whether the improvement is attributable to the extracted parameters or to other experimental factors.
- [System Identification Module] System identification module: the claim that limited wiggle observations suffice to extract transferable parameters assumes the learned simulation priors capture real physics rather than simulation-specific artifacts. The paper should include an ablation on the number of wiggle observations required and a validation that the predicted parameters remain consistent when the same rope is tested under different tasks or slight environmental changes.
minor comments (2)
- [Abstract] The abstract states results for 'multiple dynamic manipulation tasks' but provides quantitative metrics only for 3D target striking; a table or additional paragraph summarizing performance across the claimed tasks would strengthen the task-agnostic claim.
- The manuscript references a project website but does not indicate whether code, trained models, or the exact wiggle-observation protocol are released; adding this information would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed comments, which have helped us identify areas where the manuscript can be clarified and strengthened. We address each major comment point by point below.
read point-by-point responses
-
Referee: [Abstract / Results] Abstract and results: the headline claim that the system-ID module recovers 'descriptive physical parameters' enabling zero-shot transfer rests on a single 0.95 Pearson correlation between Fourier frequencies of predicted and real ropes on one unseen trajectory. This metric is only a weak proxy for whether the recovered values of mass, stiffness, or damping match real physics or generalize across ropes and tasks; no direct ground-truth comparison (e.g., measured mass or stiffness versus predicted values) is provided.
Authors: We agree that direct ground-truth measurements of parameters such as mass or stiffness would be ideal but are difficult to obtain for physical ropes without specialized equipment that risks altering the object. The Fourier frequency correlation is a relevant proxy because rope oscillation frequencies are governed by the underlying physical parameters (e.g., natural frequency scales with sqrt(stiffness/mass)). We will revise the abstract and results to better motivate this metric, qualify the claim as validated through behavioral dynamics rather than direct measurement, and add trajectory-matching results on additional unseen motions to support generalization. revision: yes
-
Referee: [Results / Experiments] The 3.55 cm vs. 15.34 cm accuracy gap for 3D target striking is load-bearing for the central contribution, yet the manuscript does not report error bars, number of trials, or the precise construction of the non-informed baseline (identical optimization but with default or zeroed parameters?). Without these details it is impossible to determine whether the improvement is attributable to the extracted parameters or to other experimental factors.
Authors: We thank the referee for identifying this omission. The revised manuscript will report the number of trials performed for the 3D striking experiments, include error bars as standard deviation across trials, and explicitly describe the non-informed baseline as the identical optimization procedure with physical parameters set to default nominal values (instead of the system-identified values). These additions will make clear that the reported improvement stems from the recovered parameters. revision: yes
-
Referee: [System Identification Module] System identification module: the claim that limited wiggle observations suffice to extract transferable parameters assumes the learned simulation priors capture real physics rather than simulation-specific artifacts. The paper should include an ablation on the number of wiggle observations required and a validation that the predicted parameters remain consistent when the same rope is tested under different tasks or slight environmental changes.
Authors: We agree that these analyses would strengthen the claims regarding the sufficiency of limited observations and transferability. We will add an ablation on the number of wiggle observations (using subsets of the collected motions) and results showing parameter consistency when the same rope is used across different tasks. We will also expand the discussion to explain how training the priors on a diverse range of simulated rope configurations helps reduce the risk of simulation-specific artifacts. revision: yes
Circularity Check
No significant circularity; derivation relies on empirical real-world validation
full rationale
The paper presents a two-stage framework where a system identification module extracts physical parameters from limited wiggle observations using learned simulation priors, followed by optimization for zero-shot action prediction. Performance is validated through direct real-world metrics (3.55 cm vs 15.34 cm accuracy on target striking) and a Pearson correlation of 0.95 on Fourier frequencies for an unseen trajectory. No step reduces by construction to its inputs via self-definition, fitted parameters renamed as predictions, or load-bearing self-citations. The central claims are supported by external benchmarks (real robot execution) rather than internal redefinitions, making the chain self-contained against the reported empirical results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Optimal cosserat-based deforma- tion control for robotic manipulation of linear objects
Artinian Azad, Huet Quentin, Ben Amar Faiz, and Perdereau V ´eronique. Optimal cosserat-based deforma- tion control for robotic manipulation of linear objects. In 2023 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pages 381–388. IEEE, 2023
2023
-
[2]
D.A. Bristow, M. Tharayil, and A.G. Alleyne. A survey of iterative learning control.IEEE Control Systems Magazine, 26(3):96–114, 2006. doi: 10.1109/MCS.2006. 1636313
-
[3]
Efficiently learning single-arm fling motions to smooth garments
Lawrence Yunliang Chen, Huang Huang, Ellen Novoseller, Daniel Seita, Jeffrey Ichnowski, Michael Laskey, Richard Cheng, Thomas Kollar, and Ken Goldberg. Efficiently learning single-arm fling motions to smooth garments. InThe International Symposium of Robotics Research, pages 36–51. Springer, 2022
2022
-
[4]
Yizhou Chen, Yiting Zhang, Zachary Brei, Tiancheng Zhang, Yuzhen Chen, Julie Wu, and Ram Vasudevan. Differentiable discrete elastic rods for real-time mod- eling of deformable linear objects.arXiv preprint arXiv:2406.05931, 2024
-
[5]
Cheng Chi, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, and Shuran Song. Iterative Residual Policy: for Goal-Conditioned Dynamic Manipulation of Deformable Objects, April 2022. arXiv:2203.00663
-
[6]
Completely derandomized self-adaptation in evolution strategies
Nikolaus Hansen and Andreas Ostermeier. Completely derandomized self-adaptation in evolution strategies. Evolutionary Computation, 9(2):159–195, 2001. doi: 10.1162/106365601750190398
-
[7]
Chainqueen: A real- time differentiable physical simulator for soft robotics
Yuanming Hu, Jiancheng Liu, Andrew Spielberg, Joshua B Tenenbaum, William T Freeman, Jiajun Wu, Daniela Rus, and Wojciech Matusik. Chainqueen: A real- time differentiable physical simulator for soft robotics. In 2019 International conference on robotics and automa- tion (ICRA), pages 6265–6271. IEEE, 2019
2019
-
[8]
Ali Jnadi, Hadi Salloum, Yaroslav Kholodov, Alexander Gasnikov, and Karam Almaghout. Scope: Smooth convex optimization for planned evolution of deformable linear objects.arXiv preprint arXiv:2601.19742, 2026
-
[9]
doi:10.48550/ARXIV.2410.11831 SA Conference Papers ’25, December 15–18, 2025, Hong Kong, Hong Kong
Nikita Karaev, Iurii Makarov, Jianyuan Wang, Na- talia Neverova, Andrea Vedaldi, and Christian Rup- precht. Cotracker3: Simpler and better point tracking by pseudo-labelling real videos, 2024.URL https://arxiv. org/abs/2410.11831
-
[10]
Rma: Rapid motor adaptation for legged robots,
Ashish Kumar, Zipeng Fu, Deepak Pathak, and Jitendra Malik. RMA: Rapid Motor Adaptation for Legged Robots, July 2021. arXiv:2107.04034
-
[11]
So Kuroki, Jiaxian Guo, Tatsuya Matsushima, Takuya Okubo, Masato Kobayashi, Yuya Ikeda, Ryosuke Takanami, Paul Yoo, Yutaka Matsuo, and Yusuke Iwa- sawa. GenDOM: Generalizable One-shot Deformable Object Manipulation with Parameter-Aware Policy, Jan- uary 2025. arXiv:2309.09051
-
[12]
GenORM: Generalizable One-shot Rope Ma- nipulation with Parameter-Aware Policy, January 2025
So Kuroki, Jiaxian Guo, Tatsuya Matsushima, Takuya Okubo, Masato Kobayashi, Yuya Ikeda, Ryosuke Takanami, Paul Yoo, Yutaka Matsuo, and Yusuke Iwa- sawa. GenORM: Generalizable One-shot Rope Ma- nipulation with Parameter-Aware Policy, January 2025. arXiv:2306.09872
-
[13]
Rapid Motor Adaptation for Robotic Manipulator Arms, March
Yichao Liang, Kevin Ellis, and Jo ˜ao Henriques. Rapid Motor Adaptation for Robotic Manipulator Arms, March
-
[14]
Planar Robot Casting with Real2Sim2Real Self-Supervised Learning, June 2022
Vincent Lim, Huang Huang, Lawrence Yunliang Chen, Jonathan Wang, Jeffrey Ichnowski, Daniel Seita, Michael Laskey, and Ken Goldberg. Planar Robot Casting with Real2Sim2Real Self-Supervised Learning, June 2022. arXiv:2111.04814
-
[15]
Softgym: Benchmarking deep reinforcement learning for deformable object manipulation
Xingyu Lin, Yufei Wang, Jake Olkin, and David Held. Softgym: Benchmarking deep reinforcement learning for deformable object manipulation. InConference on Robot Learning, pages 432–448. PMLR, 2021
2021
-
[16]
Multistage cable routing through hierarchical imitation learning.IEEE Transactions on Robotics, 40:1476–1491, 2024
Jianlan Luo, Charles Xu, Xinyang Geng, Gilbert Feng, Kuan Fang, Liam Tan, Stefan Schaal, and Sergey Levine. Multistage cable routing through hierarchical imitation learning.IEEE Transactions on Robotics, 40:1476–1491, 2024
2024
- [17]
-
[18]
gradsim: Differentiable simulation for system identification and visuomotor control
J Krishna Murthy, Miles Macklin, Florian Golemo, Vikram V oleti, Linda Petrini, Martin Weiss, Breandan Considine, J ´erˆome Parent-L ´evesque, Kevin Xie, Kenny Erleben, et al. gradsim: Differentiable simulation for system identification and visuomotor control. InInter- national conference on learning representations, 2020
2020
-
[19]
Com- bining self-supervised learning and imitation for vision- based rope manipulation, 2017
Ashvin Nair, Dian Chen, Pulkit Agrawal, Phillip Isola, Pieter Abbeel, Jitendra Malik, and Sergey Levine. Com- bining self-supervised learning and imitation for vision- based rope manipulation, 2017. URL https://arxiv.org/ abs/1703.02018
-
[20]
In-Hand Object Rotation via Rapid Motor Adaptation, October 2022
Haozhi Qi, Ashish Kumar, Roberto Calandra, Yi Ma, and Jitendra Malik. In-Hand Object Rotation via Rapid Motor Adaptation, October 2022. arXiv:2210.04887
-
[21]
Grounded SAM: Assembling Open-World Models for Diverse Visual Tasks
Tianhe Ren, Shilong Liu, Ailing Zeng, Jing Lin, Kun- chang Li, He Cao, Jiayu Chen, Xinyu Huang, Yukang Chen, Feng Yan, et al. Grounded sam: Assembling open- world models for diverse visual tasks.arXiv preprint arXiv:2401.14159, 2024
work page internal anchor Pith review arXiv 2024
-
[22]
Difftactile: A physics-based differentiable tactile simulator for contact-rich robotic manipulation,
Zilin Si, Gu Zhang, Qingwei Ben, Branden Romero, Zhou Xian, Chao Liu, and Chuang Gan. Difftac- tile: A physics-based differentiable tactile simulator for contact-rich robotic manipulation.arXiv preprint arXiv:2403.08716, 2024
-
[23]
Sihao Sun and Antonio Franchi. Nonlinear mpc for full-pose manipulation of a cable-suspended load using multiple uavs.arXiv preprint arXiv:2301.08545, 2023
-
[24]
Agile and cooperative aerial manipulation of a cable-suspended load.Science Robotics, 10(107):eadu8015, 2025
Sihao Sun, Xuerui Wang, Dario Sanalitro, Antonio Franchi, Marco Tognon, and Javier Alonso-Mora. Agile and cooperative aerial manipulation of a cable-suspended load.Science Robotics, 10(107):eadu8015, 2025
2025
-
[25]
Drake: Model-based design and verification for robotics, 2019
Russ Tedrake and the Drake Development Team. Drake: Model-based design and verification for robotics, 2019. URL https://drake.mit.edu
2019
-
[26]
Dropo: sim-to-real transfer with offline domain randomization (2022).arXiv Preprint
G Tiboni, K Arndt, and V Kyrki. Dropo: sim-to-real transfer with offline domain randomization (2022).arXiv Preprint
2022
-
[27]
Ufactory xarm 7 - 7 dof collaborative robot, 2022
UFACTORY . Ufactory xarm 7 - 7 dof collaborative robot, 2022. URL https://www.ufactory.cc/products/ xarm-7-2020. Accessed: 2024-01-26
2022
-
[28]
Cable shaping with mpc: A reliable, fast, and real-time feasible formulation.IFAC-PapersOnLine, 58(25):156–161, 2024
Ruan Viljoen, Shamil Mamedov, Johan Ubbink, Wilm Decr´e, Erwin Aertbeli ¨en, Jan Swevers, and Joris De Schutter. Cable shaping with mpc: A reliable, fast, and real-time feasible formulation.IFAC-PapersOnLine, 58(25):156–161, 2024
2024
-
[29]
Offline-online learning of deformation model for cable manipulation with graph neural networks.IEEE Robotics and Automation Letters, 7(2):5544–5551, 2022
Changhao Wang, Yuyou Zhang, Xiang Zhang, Zheng Wu, Xinghao Zhu, Shiyu Jin, Te Tang, and Masayoshi Tomizuka. Offline-online learning of deformation model for cable manipulation with graph neural networks.IEEE Robotics and Automation Letters, 7(2):5544–5551, 2022
2022
-
[30]
Self-supervised learning of dynamic planar manipulation of free-end cables, 2024
Jonathan Wang, Huang Huang, Vincent Lim, Harry Zhang, Jeffrey Ichnowski, Daniel Seita, Yunliang Chen, and Ken Goldberg. Self-supervised learning of dynamic planar manipulation of free-end cables, 2024. URL https://arxiv.org/abs/2405.09581
-
[31]
Yuji Yamakawa, Akio Namiki, and Masatoshi Ishikawa. Simple model and deformation control of a flexible rope using constant, high-speed motion of a robot arm. In 2012 IEEE International Conference on Robotics and Automation, pages 2249–2254, 2012. doi: 10.1109/ ICRA.2012.6224763
-
[32]
Dynamic high-speed knotting of a rope by a manipulator
Yuji Yamakawa, Akio Namiki, and Masatoshi Ishikawa. Dynamic high-speed knotting of a rope by a manipulator. International Journal of Advanced Robotic Systems, 10 (10):361, 2013. doi: 10.5772/56783. URL https://doi. org/10.5772/56783
-
[33]
Learning differentiable dynamics models for shape con- trol of deformable linear objects.Robotics and Au- tonomous Systems, 158:104258, 2022
Yuxuan Yang, Johannes A Stork, and Todor Stoyanov. Learning differentiable dynamics models for shape con- trol of deformable linear objects.Robotics and Au- tonomous Systems, 158:104258, 2022
2022
-
[34]
Mingrui Yu, Hanzhong Zhong, and Xiang Li. Shape control of deformable linear objects with offline and online learning of local linear deformation models, 2022. URL https://arxiv.org/abs/2109.11091
-
[35]
Harry Zhang, Jeffrey Ichnowski, Daniel Seita, Jonathan Wang, Huang Huang, and Ken Goldberg. Robots of the Lost Arc: Self-Supervised Learning to Dynami- cally Manipulate Fixed-Endpoint Cables, May 2024. arXiv:2011.04840
-
[36]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
Tony Z Zhao, Vikash Kumar, Sergey Levine, and Chelsea Finn. Learning fine-grained bimanual manipulation with low-cost hardware.arXiv preprint arXiv:2304.13705, 2023. VII. APPENDIX Appendix Table I: Complete experimental results across all rope configurations and parameter prediction methods. Results were repeatable, so one trial was performed for each tas...
work page internal anchor Pith review arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.