Recognition: unknown
A Probabilistic Framework for Hierarchical Goal Recognition
Pith reviewed 2026-05-08 08:52 UTC · model grok-4.3
The pith
A probabilistic framework combines hierarchical task networks with planning-based inference to recognize agent goals from uncertain observations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
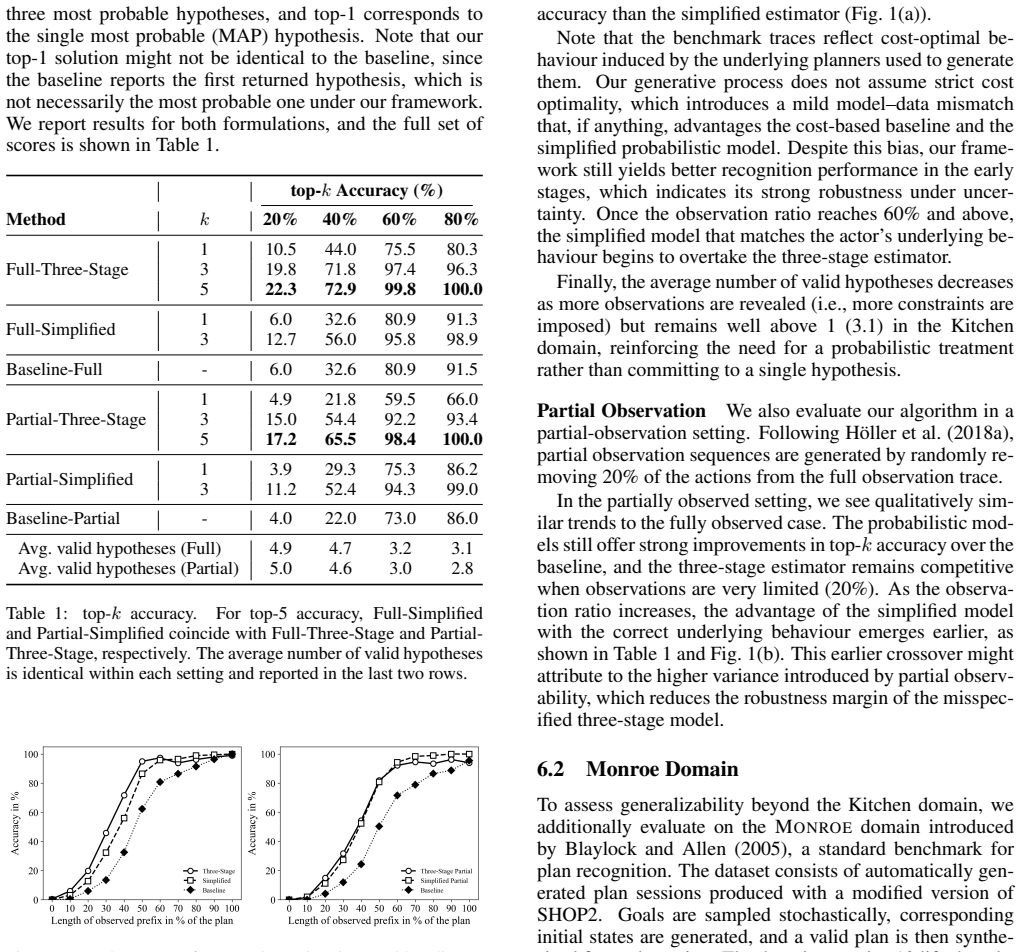
We introduce the first planning-based probabilistic framework for hierarchical goal recognition over Hierarchical Task Networks (HTNs). We instantiate the framework by exploiting an HTN planner with a three-stage generative model for likelihood estimation, yielding posterior distributions over goal hypotheses. Empirical results show improved recognition performance over the existing HTN-based recognizer on HTN benchmarks.
What carries the argument
The three-stage generative model driven by an HTN planner, which supplies likelihood estimates that convert observed behavior into posterior distributions over goal hypotheses within hierarchical task networks.
If this is right
- Posterior distributions replace single-point goal guesses, allowing downstream systems to reason about uncertainty.
- Recognition performance improves on existing HTN benchmarks without sacrificing the use of hierarchical task structure.
- The framework supplies a reusable template for adding probabilistic inference to other planning-based recognizers.
- Hierarchical planning structure becomes directly usable inside probabilistic goal-recognition pipelines.
Where Pith is reading between the lines
- The same generative-model approach could be swapped into other hierarchical planners to test whether the performance gain holds outside HTNs.
- Streaming observations could be fed incrementally into the three-stage model to produce online updates of the goal posterior.
- Parameters of the generative model might be learned from data rather than hand-specified, reducing reliance on domain expertise.
Load-bearing premise
The three-stage generative model paired with the HTN planner produces likelihood estimates accurate enough to generalize past the benchmarks used in the experiments.
What would settle it
Run the framework on a fresh HTN domain or with added observation noise where its posterior accuracy falls to or below the level of the existing non-probabilistic HTN recognizer.
Figures
read the original abstract
Goal recognition aims to infer an agent's goal from observations of its behaviour. In realistic settings, recognition can benefit from exploiting hierarchical task structure and reasoning under uncertainty. Planning-based goal recognition has made substantial progress over the past decade, but to the best of our knowledge no existing approach jointly integrates hierarchical task structure with probabilistic inference. In this paper, we introduce the first planning-based probabilistic framework for hierarchical goal recognition over Hierarchical Task Networks (HTNs). We instantiate the framework by exploiting an HTN planner with a three-stage generative model for likelihood estimation, yielding posterior distributions over goal hypotheses. Empirical results show improved recognition performance over the existing HTN-based recognizer on HTN benchmarks. Overall, the framework lays a foundation for probabilistic goal recognition grounded in hierarchical planning structure, moving goal recognition toward more practical settings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the first planning-based probabilistic framework for hierarchical goal recognition over Hierarchical Task Networks (HTNs). It instantiates the framework via an HTN planner combined with a three-stage generative model to compute likelihoods and obtain posterior distributions over goal hypotheses. Empirical evaluation on HTN benchmarks reports improved recognition performance relative to an existing non-probabilistic HTN recognizer.
Significance. If the likelihood estimates are reliable, the work fills a clear gap by integrating hierarchical task structure with probabilistic inference for goal recognition, providing a foundation that could support more robust inference in uncertain, structured domains. The benchmark improvements are a positive signal of practical utility, and the explicit framing as the first such planning-based probabilistic approach is a clear contribution.
major comments (1)
- [§5] §5 (Empirical Evaluation): The reported accuracy gains on HTN benchmarks are presented without any independent validation that the likelihoods produced by the three-stage generative model are accurate or calibrated (e.g., no calibration plots, no comparison of estimated probabilities to empirical frequencies of observations under each goal, and no discussion of potential model misspecification). This is load-bearing for the central claim because the posteriors and the claimed probabilistic framework rest on these likelihoods being sound; benchmark accuracy alone does not confirm that the generative stages yield reliable estimates.
minor comments (2)
- [Abstract] Abstract: The claim of 'improved recognition performance' is stated without any quantitative metrics, statistical tests, or details on the benchmarks, which reduces the abstract's informativeness.
- [§4] Notation and definitions: The three-stage generative model is central but its precise probabilistic formulation (conditional distributions at each stage) could be stated more formally with explicit equations to aid reproducibility and verification.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for acknowledging the novelty of our planning-based probabilistic framework for hierarchical goal recognition. We address the single major comment point by point below.
read point-by-point responses
-
Referee: [§5] §5 (Empirical Evaluation): The reported accuracy gains on HTN benchmarks are presented without any independent validation that the likelihoods produced by the three-stage generative model are accurate or calibrated (e.g., no calibration plots, no comparison of estimated probabilities to empirical frequencies of observations under each goal, and no discussion of potential model misspecification). This is load-bearing for the central claim because the posteriors and the claimed probabilistic framework rest on these likelihoods being sound; benchmark accuracy alone does not confirm that the generative stages yield reliable estimates.
Authors: We agree that the manuscript does not include explicit calibration plots, direct comparisons of estimated likelihoods against empirical observation frequencies, or a dedicated discussion of model misspecification. The current evaluation emphasizes end-to-end recognition accuracy on HTN benchmarks as the primary indicator of the framework's practical utility. Nevertheless, we recognize that stronger evidence for the soundness of the three-stage generative model's likelihood estimates would better support the probabilistic claims. In the revised manuscript we will expand §5 with (i) an explicit discussion of the assumptions and potential misspecification risks in the generative stages and (ii) calibration analysis (including plots and frequency comparisons) using the available benchmark data wherever the observation counts permit reliable empirical estimates. This constitutes a partial revision, as the existing benchmarks may not furnish exhaustive frequency data for every goal hypothesis. revision: partial
Circularity Check
No circularity; new probabilistic HTN framework is self-contained
full rationale
The paper defines a novel three-stage generative model inside an HTN planner to produce likelihoods for posterior goal inference. This construction is presented as an original integration rather than a re-derivation of prior results. No equations or steps reduce by definition to the inputs, no fitted parameters are relabeled as predictions, and the provided text contains no load-bearing self-citations or uniqueness theorems imported from the authors' prior work. Benchmark accuracy gains are reported as empirical outcomes, not as tautological consequences of the model definition. The derivation therefore remains independent of its own outputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Mirsky, R., and Gal, Y
Association for the Advancement of Artificial In- telligence. Mirsky, R., and Gal, Y . 2016. Slim: semi-lazy inference mechanism for plan recognition. InProceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence, 394–400. Pant˚uˇckov´a, K., and Bart´ak, R. 2025. Parsing-based planner for totally ordered HTN planning with tas...
2016
-
[2]
Vered, M.; Kaminka, G
Association for the Advancement of Artificial In- telligence (AAAI). Vered, M.; Kaminka, G. A.; and Biham, S. 2016. Online goal recognition through mirroring: Humans and agents. InAnnual Conference on Advances in Cognitive Systems. Cognitive Systems Foundation. Xiao, Z.; Herzig, A.; Perrussel, L.; Wan, H.; and Su, X
2016
-
[3]
InProceedings of the Twenty- Sixth International Joint Conference on Artificial Intelli- gence (IJCAI 2017), 4463–4469
Hierarchical task network planning with task inser- tion and state constraints. InProceedings of the Twenty- Sixth International Joint Conference on Artificial Intelli- gence (IJCAI 2017), 4463–4469. Yousefi, M.; Schmautz, M.; Haslum, P.; and Bercher, P
2017
-
[4]
InProceedings of the International Conference on Automated Planning and Scheduling, volume 35, 112–120
How good is perfect? on the incompleteness of A* for total-order HTN planning. InProceedings of the International Conference on Automated Planning and Scheduling, volume 35, 112–120. Zhang, C.; Cardenas, C. R.; Rezatofighi, H.; Vered, M.; and Say, B. 2025. Probabilistic active goal recognition. In Proceedings of the International Conference on Princi- ple...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.