Recognition: unknown
Computational Control of Nonlinear Partial Differential Equations Using Machine Learning
Pith reviewed 2026-05-08 11:15 UTC · model grok-4.3
The pith
Physics-informed neural networks approximate controls for nonlinear PDEs by embedding the governing equations, boundary conditions, and control mechanisms directly into the loss function.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A physics-informed neural network framework approximates controls for nonlinear PDEs by incorporating the governing equations, boundary conditions, and control mechanisms directly into the learning process, accompanied by a convergence analysis and numerical experiments that demonstrate good performance for reconstructing control functions from partial observations.
What carries the argument
Physics-informed neural network whose loss function is built from the residual of the nonlinear PDE, the boundary conditions, and the control action, so the network learns the control function as part of satisfying the full problem.
If this is right
- The framework recovers control functions from partial observations without needing closed-form analytical solutions.
- Convergence of the approximated controls is guaranteed under the stated conditions on the network and problem.
- Numerical experiments confirm practical accuracy on representative nonlinear PDE control problems.
- The same embedding technique extends in principle to a wider set of control and inverse problems for differential equations.
Where Pith is reading between the lines
- This method could bypass traditional optimization loops in control design by turning the problem into a direct supervised learning task.
- Testing the approach on time-dependent or higher-dimensional nonlinear systems would reveal how far the convergence carries beyond the presented examples.
- Direct comparisons of runtime and accuracy against classical adjoint-based or optimization-based control solvers would quantify the practical gain.
Load-bearing premise
Embedding the nonlinear PDE, boundary conditions, and control mechanisms directly into the PINN loss function produces accurate control approximations that converge for general nonlinear cases without additional restrictive assumptions.
What would settle it
A concrete nonlinear PDE test case where the learned control, when substituted back into the system, fails to drive the state to the target or satisfy the boundary conditions within the error bounds given by the convergence analysis.
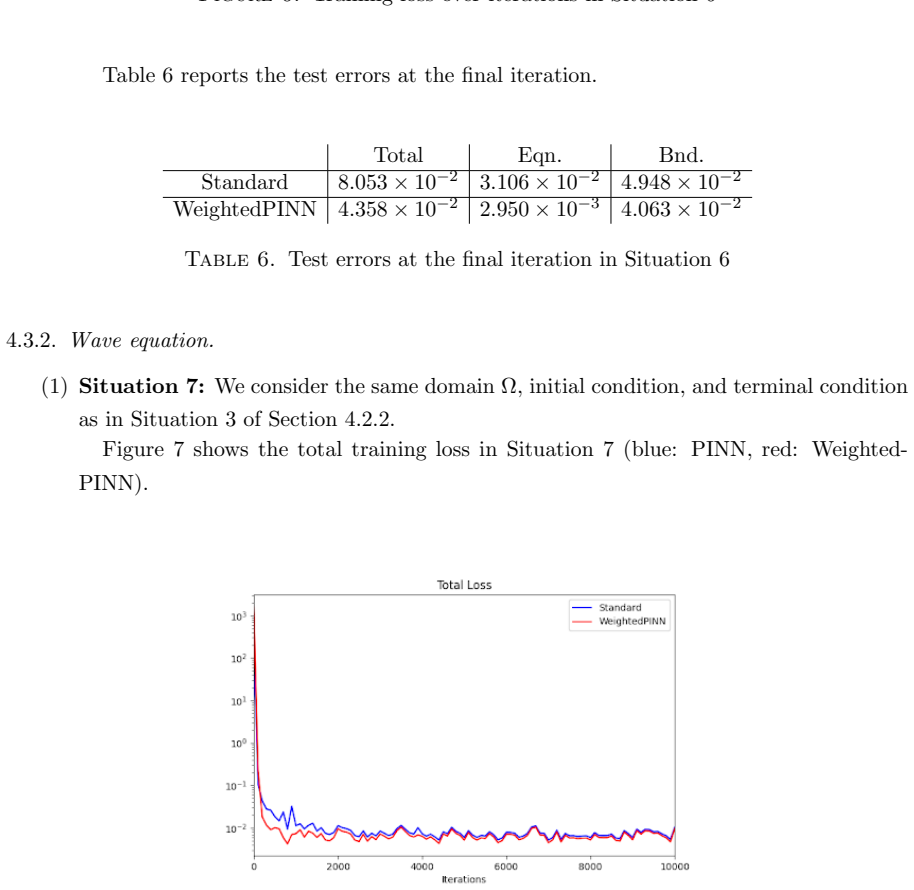
Figures







read the original abstract
The numerical reconstruction of controls for nonlinear partial differential equations remains a challenging and relatively underdeveloped problem, despite the extensive literature on control theory. While recent works have introduced constructive approaches for semilinear wave and heat equations, the design of reliable computational methods for approximating control functions continues to raise significant analytical and numerical difficulties. In this work, we propose a novel framework based on physics-informed neural networks (PINNs) for the approximation of controls in nonlinear PDE settings. We develop an approach that incorporates the governing equations, boundary conditions, and control mechanisms directly into the learning process. In addition, we provide a convergence analysis of the proposed method and support the theoretical findings with numerical experiments demonstrating good performance. The resulting framework offers a flexible computational tool for approximating control functions from partial observations and provides a promising direction for the computational treatment of control reconstruction problems. Moreover, it can be applied to a broader class of problems, beyond the control of nonlinear PDEs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a physics-informed neural network (PINN) framework for approximating controls of nonlinear PDEs. The approach embeds the governing PDE residual, boundary conditions, and control mechanisms directly into a single loss function that is minimized over neural network parameters. A convergence analysis is provided for the resulting optimization problem, and the method is tested numerically on selected nonlinear examples, with claims of good performance and applicability to control reconstruction from partial observations as well as to a broader class of problems.
Significance. If the convergence result holds under explicitly stated and verifiable assumptions, the work supplies a flexible computational tool for an area of control theory that remains analytically and numerically difficult. The explicit incorporation of the control term into the PINN loss and the provision of both theory and experiments constitute the main strengths.
major comments (2)
- [§4] §4 (Convergence analysis): The proof that the minimizer of the composite loss converges to a true control appears to require the nonlinearity to satisfy a global Lipschitz condition with sufficiently small constant or to remain in a regime where linearization is valid. These restrictions are not stated explicitly in the theorem statement or in the problem-class definition. For quadratic advection or cubic reaction terms, the loss need not be coercive and multiple controls or finite-time blow-up can occur; the current argument therefore does not guarantee convergence for the general nonlinear case asserted in the abstract and introduction.
- [§5] §5 (Numerical experiments): The reported error tables compare the learned control only against a single reference solution per example. No systematic study of the effect of increasing nonlinearity strength (e.g., varying the coefficient of the quadratic term) or of the number of partial observations is presented. Without such diagnostics it is impossible to assess whether the observed accuracy degrades precisely when the unstated Lipschitz/smallness assumptions are violated.
minor comments (3)
- [Abstract] The abstract states that the framework “can be applied to a broader class of problems, beyond the control of nonlinear PDEs,” yet no concrete example outside the control setting is given. Either remove the claim or add at least one illustrative non-control application.
- [§2–§3] Notation for the control variable and the observation operator is introduced inconsistently between §2 and §3. A single, clearly labeled definition table would improve readability.
- [§5] The training procedure (optimizer, learning-rate schedule, number of collocation points) is described only qualitatively. Quantitative details should be moved from the appendix into the main text or a dedicated table.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. We address the major points below and will revise the manuscript to incorporate the suggested clarifications.
read point-by-point responses
-
Referee: [§4] §4 (Convergence analysis): The proof that the minimizer of the composite loss converges to a true control appears to require the nonlinearity to satisfy a global Lipschitz condition with sufficiently small constant or to remain in a regime where linearization is valid. These restrictions are not stated explicitly in the theorem statement or in the problem-class definition. For quadratic advection or cubic reaction terms, the loss need not be coercive and multiple controls or finite-time blow-up can occur; the current argument therefore does not guarantee convergence for the general nonlinear case asserted in the abstract and introduction.
Authors: We agree that the convergence result relies on a global Lipschitz condition with a sufficiently small constant to guarantee coercivity of the loss and convergence to a true control; this assumption was implicit in the proof but not explicitly stated in the theorem or problem-class definition. For stronger nonlinearities such as quadratic advection or cubic reactions, the loss need not be coercive and issues with multiple controls or blow-up can arise. In the revised manuscript we will explicitly state these assumptions in the theorem statement and problem-class definition, and we will update the abstract and introduction to reflect that the guarantees apply under these conditions rather than to the fully general nonlinear case. revision: yes
-
Referee: [§5] §5 (Numerical experiments): The reported error tables compare the learned control only against a single reference solution per example. No systematic study of the effect of increasing nonlinearity strength (e.g., varying the coefficient of the quadratic term) or of the number of partial observations is presented. Without such diagnostics it is impossible to assess whether the observed accuracy degrades precisely when the unstated Lipschitz/smallness assumptions are violated.
Authors: The current experiments demonstrate performance on selected examples via comparison to reference solutions. We acknowledge that a systematic study varying nonlinearity strength and the number of partial observations is absent and would better illustrate robustness within the assumed regime as well as degradation when the assumptions are violated. We will add such diagnostics, including additional tables or figures with varying coefficients and observation counts, in the revised version. revision: yes
Circularity Check
No significant circularity in proposed PINN control framework
full rationale
The derivation chain is self-contained: the method defines a composite loss directly from the known nonlinear PDE residual, boundary conditions, and control term (as described in the abstract), then minimizes it over neural network parameters. The convergence analysis is a separate theoretical claim about minimizer behavior, and numerical experiments provide independent validation. No load-bearing step reduces by construction to a fitted input, self-citation, or ansatz smuggled from prior work; the framework treats the governing equations as external inputs rather than deriving them from the outputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Coron.Control and Nonlinearity, volume 136 ofMathematical Surveys and Mono- graphs
J.-M. Coron.Control and Nonlinearity, volume 136 ofMathematical Surveys and Mono- graphs. American Mathematical Society, Providence, RI, 2007
2007
-
[2]
E. Zuazua. Propagation, observation, and control of waves approximated by finite difference methods.SIAM Review, 47(2):197–243, 2005
2005
-
[3]
Lions.Exact Controllability, Stabilization and Perturbations for Distributed Systems
J.-L. Lions.Exact Controllability, Stabilization and Perturbations for Distributed Systems. SIAM, Philadelphia, 1988. MACHINE LEARNING FOR CONTROL PDES 37
1988
-
[4]
M¨ unch and E
A. M¨ unch and E. Tr´ elat. Constructive exact control of semilinear 1d wave equations by a least-squares approach.SIAM Journal on Control and Optimization, 60(2):652–673, 2022
2022
-
[5]
Bhandari, J
K. Bhandari, J. Lemoine, and A. M¨ unch. Exact boundary controllability of 1d semilinear wave equations through a constructive approach.Mathematics of Control, Signals, and Systems, 35:77–123, 2023
2023
-
[6]
Mar´ ın-Gayte, and A
J.e Lemoine, I. Mar´ ın-Gayte, and A. M¨ unch. Approximation of null controls for semilinear heat equations using a least-squares approach.ESAIM: Control, Optimisation and Calculus of Variations, 27:Paper No. 63, 2021
2021
-
[7]
Lemoine and A
J. Lemoine and A. M¨ unch. Constructive exact control of semilinear 1d heat equations. Mathematical Control and Related Fields, 13(1):382–414, 2023
2023
-
[8]
Bottois, J
A. Bottois, J. Lemoine, and A. M¨ unch. Constructive exact controls for semi-linear wave equations.Annals of Mathematical Sciences and Applications, 8(3):629–675, 2023
2023
-
[9]
A. M¨ unch. Approximation of exact controls for semilinear wave and heat equations through space-time methods. InNumerical Control: Part B, Handbook of Numerical Analysis. Elsevier, 2023
2023
-
[10]
M. Raissi, P. Perdikaris, and G. Em Karniadakis. Physics informed deep learning (part i): Data-driven solutions of nonlinear partial differential equations.arXiv preprint arXiv:1711.10561, 2017
work page Pith review arXiv 2017
-
[11]
M. Raissi, P. Perdikaris, and G. Em Karniadakis. Physics informed deep learning (part ii): Data-driven discovery of nonlinear partial differential equations.arXiv preprint arXiv:1711.10566, 2017
-
[12]
Raissi, P
M. Raissi, P. Perdikaris, and G. Em Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707, 2019
2019
-
[13]
S. Wang, Y. Teng, and P. Perdikaris. Understanding and mitigating gradient flow pathologies in physics-informed neural networks.SIAM Journal on Scientific Computing, 43(5):A3055–A3081, 2021
2021
-
[14]
Jagtap, E
A.D. Jagtap, E. Kharazmi, and G. Em Karniadakis. Conservative physics-informed neural networks on discrete domains for conservation laws: Applications to forward and inverse problems.Computer Methods in Applied Mechanics and Engineering, 365:113028, 2020
2020
-
[15]
A. D. Jagtap, K. Kawaguchi, and G. Em Karniadakis. Extended physics-informed neural networks (XPINNs): A generalized space-time domain decomposition based deep learning framework for nonlinear partial differential equations.Communications in Computational Physics, 28(5):2002–2041, 2020
2002
-
[16]
L. D. McClenny and U. Braga-Neto. Self-adaptive physics-informed neural networks using a soft attention mechanism.Journal of Computational Physics, 474:111722, 2023
2023
-
[17]
Y. Shin, J. Darbon, and G. Em Karniadakis. On the convergence of physics informed neural networks for linear second-order elliptic and parabolic type PDEs.Communications in Computational Physics, 28(5):2042–2074, 2020
2042
-
[18]
Mishra and R
S. Mishra and R. Molinaro. Estimates on the generalization error of physics-informed neural networks for approximating partial differential equations.IMA Journal of Numerical 38 MAXIMILIAN KURBANOV, MINH-NHAT PHUNG, AND MINH-BINH TRAN Analysis, 43(1):1–43, 2023
2023
- [19]
-
[20]
De Ryck and S
T. De Ryck and S. Mishra. Numerical analysis of physics-informed neural networks and related models in physics-informed machine learning.Acta Numerica, 2024
2024
-
[21]
PINNs in PDE Constrained Optimal Control Problems: Direct vs Indirect Methods
Z. Zhang, S. Liu, A. Alla, J. Darbon, and G. Em Karniadakis. Pinns in pde constrained optimal control problems: Direct vs indirect methods.arXiv preprint arXiv:2604.04920, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[22]
J. Yong, X. Luo, and S. Sun. Deep multi-input and multi-output operator networks method for optimal control of pdes.Electronic Research Archive, 32(7):4291–4320, 2024
2024
-
[23]
C. J. Garc´ ıa-Cervera, M. Kessler, and F. Periago. Control of partial differential equations via physics-informed neural networks.Journal of Optimization Theory and Applications, 196:391–414, 2023
2023
-
[24]
A. Alla, G. Bertaglia, and E. Calzola. A pinn approach for the online identification and control of unknown pdes.Journal of Optimization Theory and Applications, 206:8, 2025
2025
-
[25]
A. Bensoussan, T. P. B. Nguyen, M.-B. Tran, and S. N. T. Tu. Operator splitting, policy iteration, and machine learning for stochastic optimal control.arXiv preprint arXiv:2603.12167, 2026
-
[26]
Bensoussan, Y
A. Bensoussan, Y. Li, D. P. C. Nguyen, M.-B. Tran, S. C. P. Yam, and X. Zhou. Machine learning and control theory. InNumerical Control: Part A, volume 23 ofHandbook of Numerical Analysis, pages 531–558. Elsevier, 2022
2022
-
[27]
Walton, M.-B
S. Walton, M.-B. Tran, and A. Bensoussan. A deep learning approximation of non- stationary solutions to wave kinetic equations.Applied Numerical Mathematics, 199:213– 226, 2024
2024
-
[28]
Fern´ andez-Cara and E
E. Fern´ andez-Cara and E. Zuazua. Null and approximate controllability for weakly blowing up semilinear heat equations.Annales de l’Institut Henri Poincar´ e C, Analyse non lin´ eaire, 17(5):583–616, 2000
2000
-
[29]
Fern’andez-Cara and S
E. Fern’andez-Cara and S. Guerrero. Global carleman inequalities for parabolic systems and application to controllability.SIAM Journal on Control and Optimization, 45(4):1395– 1446, 2006
2006
-
[30]
E. Zuazua. Exact controllability and stabilization of the wave equation, 2024
2024
-
[31]
X. Fu, J. Yong, and X. Zhang. Exact controllability for multidimensional semilinear hy- perbolic equations.SIAM Journal on Control and Optimization, 46(5):1578–1614, 2007
2007
-
[32]
P. Lin, Z. Zhou, and H. Gao. Exact controllability of the parabolic system with bilinear control.Applied Mathematics Letters, 19(6):568–575, 2006
2006
-
[33]
Beauchard
K. Beauchard. Local controllability and non-controllability for a 1d wave equation with bilinear control.Journal of Differential Equations, 250(6):2064–2098, 2011
2064
-
[34]
Controllability of the wave equation with bilinear controls
M. Ouzahra. Comments on “Controllability of the wave equation with bilinear controls”. European Journal of Control, 20(2), 2013
2013
-
[35]
Yang and J
Y. Yang and J. He. Deep neural networks with general activations: Super-convergence in sobolev norms, 2025. MACHINE LEARNING FOR CONTROL PDES 39
2025
-
[36]
Cazenave and A
T. Cazenave and A. Haraux. ’equations d”evolution avec non lin’earit’e logarithmique. Annales de la Facult’e des sciences de Toulouse : Math’ematiques, 5e s’erie, 2(1):21–51, 1980
1980
-
[37]
L. C. Evans.Partial differential equations, volume 19 ofGraduate Studies in Mathematics. American Mathematical Society, Providence, RI, 1998
1998
-
[38]
Ern and J.-L
A. Ern and J.-L. Guermond.Finite Elements I: Approximation and Interpolation, vol- ume 72 ofTexts in Applied Mathematics. Springer, Cham, Switzerland, 2021. (Maximilian Kurbanov)Department of Mathematics, Texas A&M University, College Station, TX, 77843 USA Email address, Maximilian Kurbanov:maxkurbanov@tamu.edu (Minh-Nhat Phung)Department of Mathematics,...
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.