Recognition: unknown
Compositional Online Learning for Multi-Objective System Co-Design
Pith reviewed 2026-05-08 11:10 UTC · model grok-4.3
The pith
Optimistic evaluators use history-dependent bounds to safely eliminate suboptimal designs before full evaluation in compositional multi-objective co-design.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
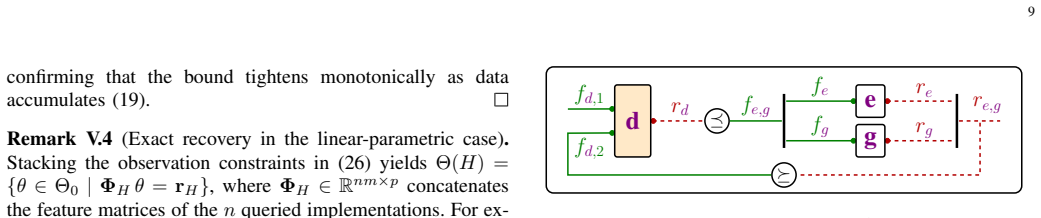
In monotone co-design, where functionalities and resources admit partial orders, optimistic evaluators supply history-dependent bounds on the maps from implementations to functionalities and resources. These bounds certify that certain implementations cannot be target-feasible or cannot improve the current admissible antichain, permitting their safe removal. The resulting rejection-sampling procedure is proven sound—it never discards any member of the true target-feasible antichain—and the admissible region is shown to shrink monotonically. When the co-design problem is compositional and represented by a multigraph, local optimistic certificates propagate through the remaining tractable sub-
What carries the argument
Optimistic evaluators: history-dependent bounds on functionality and resource mappings that certify safe elimination of implementations prior to full evaluation.
If this is right
- The elimination algorithm never removes any member of the true target-feasible antichain.
- The admissible region of candidate designs contracts monotonically with accumulating evaluations.
- Local optimistic certificates propagate through compositional multigraphs to produce system-level feasibility and resource bounds.
- Experiments demonstrate sample-efficiency gains relative to uniform sampling, Bayesian optimization, and multi-objective evolutionary algorithms on robot-fleet and mobility-system instances.
Where Pith is reading between the lines
- The same bounding technique could be combined with surrogate models to handle higher-dimensional implementation spaces where direct Lipschitz constants are unavailable.
- If the partial-order structure can be relaxed to approximate orders, the method might apply to nearly monotone problems arising in control or economics.
- The monotonic shrinkage property suggests the algorithm could be run in an anytime fashion, returning improving approximations as budget is exhausted.
Load-bearing premise
Functionalities and resources must be partially ordered and the underlying mappings must obey monotonicity, Lipschitz continuity, or linear-parametric structure.
What would settle it
An implementation that the algorithm eliminates on the basis of its optimistic bounds is later found, after full evaluation, to belong to the target-feasible antichain.
Figures




read the original abstract
Many engineered systems must balance competing objectives, such as performance and safety, cost and reliability, or efficiency and sustainability, and are naturally modeled as compositions of interacting subsystems. We study online multi-objective decision-making in monotone co-design, where functionalities and resources are partially ordered, and the goal is to identify the target-feasible antichain of non-dominated trade-offs using few expensive evaluations. We introduce optimistic evaluators: history-dependent bounds on functionality and resource mappings that enable safe elimination of implementations before full evaluation. Based on these evaluators, we develop an elimination-based rejection-sampling algorithm, prove its soundness, and show that the admissible region shrinks monotonically as information accumulates. We instantiate the framework under monotonicity, Lipschitz continuity, and linear-parametric structure. For compositional co-design problems modeled by multigraphs, we show how local optimistic certificates propagate through the tractable remainder of the graph to yield system-level optimistic feasibility and resource bounds. Experiments on multi-robot fleet design, intermodal mobility systems, and synthetic monotone and Lipschitz benchmarks show substantial sample-efficiency gains over uniform sampling, Bayesian optimization, and multi-objective evolutionary algorithms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces optimistic evaluators as history-dependent bounds on functionality and resource mappings for monotone co-design problems. It develops an elimination-based rejection-sampling algorithm, proves its soundness, shows that the admissible region shrinks monotonically with accumulated information, and extends the approach to compositional propagation of local certificates through multigraphs. The framework is instantiated under monotonicity, Lipschitz continuity, and linear-parametric structure assumptions, with experiments on multi-robot fleet design, intermodal mobility systems, and synthetic benchmarks demonstrating sample-efficiency gains over uniform sampling, Bayesian optimization, and evolutionary algorithms.
Significance. If the soundness proof and monotonicity claims hold under the stated assumptions, the work provides a principled, sample-efficient method for identifying non-dominated trade-offs in expensive multi-objective system co-design tasks. The compositional extension for multigraphs and the explicit soundness guarantee are notable strengths that could apply to real engineered systems where evaluations are costly. The empirical comparisons add practical value, though the significance depends on the tightness of the optimistic bounds in practice.
major comments (2)
- [§4] §4 (Soundness proof): The central claim that the elimination algorithm is sound and the admissible region shrinks monotonically relies on the optimistic evaluators being valid bounds derived from history; the manuscript should include an explicit lemma verifying that the update rules under the linear-parametric instantiation preserve the required partial-order monotonicity without introducing false negatives.
- [§5.3] §5.3 (Compositional propagation): The propagation of local optimistic certificates through the tractable remainder of the multigraph is load-bearing for the system-level claims, but the manuscript does not provide a formal bound on how approximation errors in local evaluators accumulate globally, which could affect the safety of elimination at the system level.
minor comments (3)
- [§6] The experimental section compares against Bayesian optimization but does not specify the exact acquisition function, kernel, or number of initial points used, making it difficult to reproduce the reported gains.
- [§2] Notation for the partial orders on functionalities and resources is introduced late; an early illustrative example with concrete sets would improve readability.
- [§6] The abstract claims 'substantial sample-efficiency gains' but the main text lacks statistical significance tests (e.g., p-values or confidence intervals) across the 22 runs mentioned.
Simulated Author's Rebuttal
We thank the referee for their careful reading, positive assessment, and recommendation for minor revision. We address each major comment below.
read point-by-point responses
-
Referee: [§4] §4 (Soundness proof): The central claim that the elimination algorithm is sound and the admissible region shrinks monotonically relies on the optimistic evaluators being valid bounds derived from history; the manuscript should include an explicit lemma verifying that the update rules under the linear-parametric instantiation preserve the required partial-order monotonicity without introducing false negatives.
Authors: We agree that an explicit lemma would strengthen the presentation. In the revised manuscript we will insert a new lemma (Lemma 4.3) in §4 that directly verifies the update rules for the linear-parametric optimistic evaluators preserve partial-order monotonicity and introduce no false negatives. The lemma follows immediately from the definition of history-dependent bounds and the maintained monotonicity assumptions on the underlying mappings. revision: yes
-
Referee: [§5.3] §5.3 (Compositional propagation): The propagation of local optimistic certificates through the tractable remainder of the multigraph is load-bearing for the system-level claims, but the manuscript does not provide a formal bound on how approximation errors in local evaluators accumulate globally, which could affect the safety of elimination at the system level.
Authors: We respectfully note that the local evaluators are not approximations but valid history-dependent bounds. Under the stated monotonicity assumptions, the compositional propagation defined in §5.3 composes these bounds exactly, so that system-level optimistic feasibility and resource certificates remain valid whenever the local certificates are valid. Consequently, elimination stays sound (no false negatives) by construction; a quantitative error-accumulation bound is not required for the safety guarantee. We will add a short clarifying remark in the revised §5.3 to emphasize this point. revision: no
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper's central derivation begins from the explicit assumptions of monotone co-design with partial orders on functionalities and resources, defines optimistic evaluators as history-dependent bounds derived from accumulated evaluations, constructs an elimination-based rejection sampler, and provides an independent soundness proof that the admissible region shrinks monotonically. No step equates a claimed prediction to a fitted parameter by construction, no uniqueness theorem is imported via self-citation, and compositional propagation on multigraphs is restricted to the tractable remainder under the stated monotonicity/Lipschitz/linear-parametric structures without smuggling ansatzes or renaming known results. The framework remains self-contained against external benchmarks such as uniform sampling and Bayesian optimization.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Functionalities and resources are partially ordered in monotone co-design problems
- domain assumption Mappings satisfy monotonicity, Lipschitz continuity, or linear-parametric structure
invented entities (1)
-
optimistic evaluators
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Ehrgott,Multicriteria Optimization
M. Ehrgott,Multicriteria Optimization. Springer, 2005
2005
-
[2]
Co-Design of Complex Systems: From Autonomy to Future Mobility Systems,
G. Zardini, “Co-Design of Complex Systems: From Autonomy to Future Mobility Systems,” Ph.D. dissertation, ETH Zurich, 2023
2023
-
[3]
Pareto Optimal Solutions for Smoothed Analysts,
A. Moitra and R. O’Donnell, “Pareto Optimal Solutions for Smoothed Analysts,” inProceedings of the forty-third annual ACM symposium on Theory of Computing, 2011, pp. 225–234
2011
-
[4]
A Benson-Type Algorithm for Bounded Convex Vector Optimization Problems with Vertex Selection,
D. D ¨orfler, A. L ¨ohne, C. Schneider, and B. Weißing, “A Benson-Type Algorithm for Bounded Convex Vector Optimization Problems with Vertex Selection,”Optimization Methods and Software, vol. 37, no. 3, pp. 1006–1026, 2022
2022
-
[5]
Sequential Learning of the Pareto Front for Multi-objective Bandits,
´e. crepon, A. Garivier, and W. M. Koolen, “Sequential Learning of the Pareto Front for Multi-objective Bandits,” inInternational Conference on Artificial Intelligence and Statistics. PMLR, 2024, pp. 3583–3591
2024
-
[6]
A mathematical theory of co-design.arXiv preprint arXiv:1512.08055(2015)
A. Censi, “A Mathematical Theory of Co-Design,”arXiv preprint arXiv:1512.08055, 2015
-
[7]
Co-Design of Autonomous Systems: From Hardware Selection to Control Synthesis,
G. Zardini, A. Censi, and E. Frazzoli, “Co-Design of Autonomous Systems: From Hardware Selection to Control Synthesis,” in2021 European Control Conference (ECC). IEEE, 2021, pp. 682–689
2021
-
[8]
Task-driven Modular Co-design of Vehicle Control Systems,
G. Zardini, Z. Suter, A. Censi, and E. Frazzoli, “Task-driven Modular Co-design of Vehicle Control Systems,” in2022 IEEE 61st Conference on Decision and Control (CDC). IEEE, 2022, pp. 2196–2203
2022
-
[9]
Applied Compositional Thinking for Engineering,
A. Censi, J. Lorand, and G. Zardini, “Applied Compositional Thinking for Engineering,” 2024, work-in-progress book
2024
-
[10]
Task-Driven Co-Design of Heterogeneous Multi-Robot Systems
M. Stralz, M. Alharbi, Y . Huang, and G. Zardini, “Task-Driven Co-Design of Heterogeneous Multi-Robot Systems,”arXiv preprint arXiv:2604.21894, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[11]
Multidisciplinary Design Optimization: A Survey of Architectures,
J. R. Martins and A. B. Lambe, “Multidisciplinary Design Optimization: A Survey of Architectures,”AIAA journal, vol. 51, no. 9, pp. 2049–2075, 2013
2049
-
[12]
Design Automation of Cyber- Physical Systems: Challenges, Advances, and Opportunities,
S. A. Seshia, S. Hu, W. Li, and Q. Zhu, “Design Automation of Cyber- Physical Systems: Challenges, Advances, and Opportunities,”IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, vol. 36, no. 9, pp. 1421–1434, 2016
2016
-
[13]
A Survey on Learnable Evo- lutionary Algorithms for Scalable Multiobjective Optimization,
S. Liu, Q. Lin, J. Li, and K. C. Tan, “A Survey on Learnable Evo- lutionary Algorithms for Scalable Multiobjective Optimization,”IEEE Transactions on Evolutionary Computation, vol. 27, no. 6, pp. 1941– 1961, 2023
1941
-
[14]
A Survey of Multi-objective Evolutionary Algorithm Based on Decomposition: Past and Future,
K. Li, “A Survey of Multi-objective Evolutionary Algorithm Based on Decomposition: Past and Future,”IEEE Transactions on Evolutionary Computation, 2024
2024
-
[15]
An Evolutionary Many-Objective Optimization Al- gorithm Using Reference-Point-Based Nondominated Sorting Approach, Part I: Solving Problems With Box Constraints,
K. Deb and H. Jain, “An Evolutionary Many-Objective Optimization Al- gorithm Using Reference-Point-Based Nondominated Sorting Approach, Part I: Solving Problems With Box Constraints,”IEEE Transactions on Evolutionary Computation, vol. 18, no. 4, pp. 577–601, 2013
2013
-
[16]
MOEA/D: A Multiobjective Evolutionary Algo- rithm Based on Decomposition,
Q. Zhang and H. Li, “MOEA/D: A Multiobjective Evolutionary Algo- rithm Based on Decomposition,”IEEE Transactions on Evolutionary Computation, vol. 11, no. 6, pp. 712–731, 2007
2007
-
[17]
Quality Evaluation of Solution Sets in Multiobjective Optimisation: A Survey,
M. Li and X. Yao, “Quality Evaluation of Solution Sets in Multiobjective Optimisation: A Survey,”ACM Computing Surveys (CSUR), vol. 52, no. 2, pp. 1–38, 2019
2019
-
[18]
Recent Advances in Bayesian Optimization,
X. Wang, Y . Jin, S. Schmitt, and M. Olhofer, “Recent Advances in Bayesian Optimization,”ACM computing surveys, vol. 55, no. 13s, pp. 1–36, 2023
2023
-
[19]
ParEGO: A Hybrid Algorithm with On-line Landscape Approximation for Expensive Multiobjective Optimization Problems,
J. Knowles, “ParEGO: A Hybrid Algorithm with On-line Landscape Approximation for Expensive Multiobjective Optimization Problems,” IEEE Transactions on Evolutionary Computation, vol. 10, no. 1, pp. 50–66, 2006
2006
-
[20]
Differentiable Expected Hypervolume Improvement for Parallel Multi-Objective Bayesian Opti- mization,
S. Daulton, M. Balandat, and E. Bakshy, “Differentiable Expected Hypervolume Improvement for Parallel Multi-Objective Bayesian Opti- mization,”Advances in neural information processing systems, vol. 33, pp. 9851–9864, 2020
2020
-
[21]
Unexpected Improvements to Expected Improvement for Bayesian Op- timization,
S. Ament, S. Daulton, D. Eriksson, M. Balandat, and E. Bakshy, “Unexpected Improvements to Expected Improvement for Bayesian Op- timization,”Advances in neural information processing systems, vol. 36, pp. 20 577–20 612, 2023
2023
-
[22]
Predictive Entropy Search for Multi-objective Bayesian Optimization,
D. Hern ´andez-Lobato, J. Hernandez-Lobato, A. Shah, and R. Adams, “Predictive Entropy Search for Multi-objective Bayesian Optimization,” inInternational conference on machine learning. PMLR, 2016, pp. 1492–1501
2016
-
[23]
Max-value Entropy Search for Multi-Objective Bayesian Optimization,
S. Belakaria, A. Deshwal, and J. R. Doppa, “Max-value Entropy Search for Multi-Objective Bayesian Optimization,”Advances in neural information processing systems, vol. 32, 2019
2019
-
[24]
e-PAL: An Active Learning Approach to the Multi-Objective Optimization Problem,
M. Zuluaga, A. Krause, and M. P ¨uschel, “e-PAL: An Active Learning Approach to the Multi-Objective Optimization Problem,”Journal of Machine Learning Research, vol. 17, no. 104, pp. 1–32, 2016
2016
-
[25]
FlexiBO: A Decoupled Cost-Aware Multi-Objective Optimization Approach for Deep Neural Networks,
M. S. Iqbal, J. Su, L. Kotthoff, and P. Jamshidi, “FlexiBO: A Decoupled Cost-Aware Multi-Objective Optimization Approach for Deep Neural Networks,”Journal of Artificial Intelligence Research, vol. 77, pp. 645– 682, 2023
2023
-
[26]
Designing Multi-Objective Multi-Armed Bandits Algorithms: A Study,
M. M. Drugan and A. Nowe, “Designing Multi-Objective Multi-Armed Bandits Algorithms: A Study,” inThe 2013 international joint confer- ence on neural networks (IJCNN). IEEE, 2013, pp. 1–8
2013
-
[27]
Multi-objective Bandits: Optimizing the Generalized Gini Index,
R. Busa-Fekete, B. Sz ¨or´enyi, P. Weng, and S. Mannor, “Multi-objective Bandits: Optimizing the Generalized Gini Index,” inInternational Con- ference on Machine Learning. PMLR, 2017, pp. 625–634
2017
-
[28]
Lattimore and C
T. Lattimore and C. Szepesv ´ari,Bandit Algorithms. Cambridge University Press, 2020
2020
-
[29]
Pareto Front Identification from Stochastic Bandit Feedback,
P. Auer, C.-K. Chiang, R. Ortner, and M. Drugan, “Pareto Front Identification from Stochastic Bandit Feedback,” inArtificial intelligence and statistics. PMLR, 2016, pp. 939–947
2016
-
[30]
Vector Optimization with Stochastic Bandit Feedback,
C. Ararat and C. Tekin, “Vector Optimization with Stochastic Bandit Feedback,” inInternational Conference on Artificial Intelligence and Statistics. PMLR, 2023, pp. 2165–2190
2023
-
[31]
Bandit Pareto Set Identifica- tion in a Multi-Output Linear Model,
C. Kone, E. Kaufmann, and L. Richert, “Bandit Pareto Set Identifica- tion in a Multi-Output Linear Model,” inInternational Conference on Artificial Intelligence and Statistics. PMLR, 2025, pp. 1189–1197
2025
-
[32]
Performance Assessment of Multiobjective Optimizers: An Analysis and Review,
E. Zitzler, L. Thiele, M. Laumanns, C. M. Fonseca, and V . G. Da Fonseca, “Performance Assessment of Multiobjective Optimizers: An Analysis and Review,”IEEE Transactions on Evolutionary Computation, vol. 7, no. 2, pp. 117–132, 2003
2003
-
[33]
X-Armed Bandits,
S. Bubeck, R. Munos, G. Stoltz, and C. Szepesv ´ari, “X-Armed Bandits,” Journal of Machine Learning Research, vol. 12, no. 5, 2011
2011
-
[34]
B. A. Davey and H. A. Priestley,Introduction to Lattices and Order. Cambridge University Press, 2002
2002
-
[35]
A Reference Vec- tor Guided Evolutionary Algorithm for Many-Objective Optimization,
R. Cheng, Y . Jin, M. Olhofer, and B. Sendhoff, “A Reference Vec- tor Guided Evolutionary Algorithm for Many-Objective Optimization,” IEEE Transactions on Evolutionary Computation, vol. 20, no. 5, pp. 773–791, 2016
2016
-
[36]
Knowledge Guided Bayesian Classification for Dynamic Multi-Objective Optimiza- tion,
Y . Ye, L. Li, Q. Lin, K.-C. Wong, J. Li, and Z. Ming, “Knowledge Guided Bayesian Classification for Dynamic Multi-Objective Optimiza- tion,”Knowledge-Based Systems, vol. 250, p. 109173, 2022
2022
-
[37]
Algorithm 247: Radical-Inverse Quasi-Random Point Sequence,
J. H. Halton, “Algorithm 247: Radical-Inverse Quasi-Random Point Sequence,”Communications of the ACM, vol. 7, no. 12, pp. 701–702, 1964
1964
-
[38]
Leobacher and F
G. Leobacher and F. Pillichshammer,Introduction to Quasi-Monte Carlo Integration and Applications. Springer, 2014
2014
-
[39]
Co- Design to Enable User-Friendly Tools to Assess the Impact of Future Mobility Solutions,
G. Zardini, N. Lanzetti, A. Censi, E. Frazzoli, and M. Pavone, “Co- Design to Enable User-Friendly Tools to Assess the Impact of Future Mobility Solutions,”IEEE Transactions on Network Science and Engi- neering, vol. 10, no. 2, pp. 827–844, 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.