Recognition: unknown
Vision-Based Lane Following and Traffic Sign Recognition for Resource-Constrained Autonomous Vehicles
Pith reviewed 2026-05-09 21:37 UTC · model grok-4.3
The pith
A lightweight vision pipeline performs real-time lane tracking and traffic sign recognition on resource-constrained autonomous vehicles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
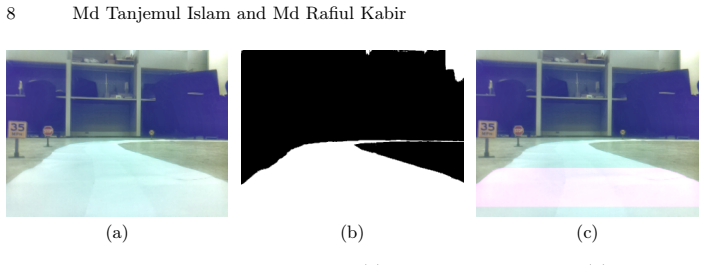
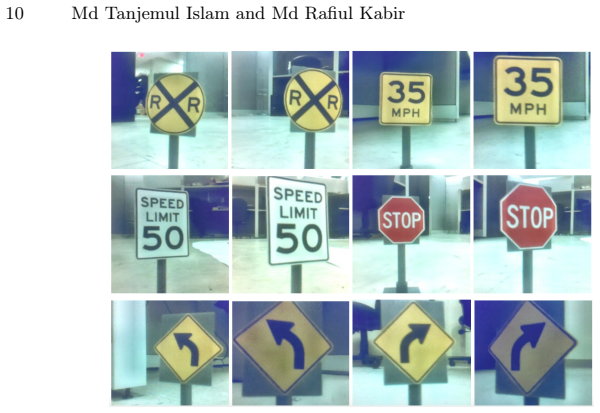
A threshold-based lane segmentation method combined with perspective transformation and histogram-based curvature estimation, paired with a rule-based steering controller, maintains lane tracking at a maximum offset RMSE of 3.16 percent while running in real time. On a custom dataset collected from the vehicle camera, EfficientNet-B0 reaches 98.77 percent offline classification accuracy for traffic signs and 90 percent accuracy when running live on the embedded device, outperforming MobileNetV2 in accuracy while the latter offers modestly lower compute cost.
What carries the argument
Threshold-based lane segmentation with perspective transformation and histogram curvature estimation for tracking, together with lightweight CNNs (EfficientNet-B0 and MobileNetV2) for traffic sign classification.
If this is right
- The full pipeline sustains real-time operation on embedded hardware suitable for low-cost autonomous vehicles.
- EfficientNet-B0 delivers higher sign-recognition accuracy than MobileNetV2 at a modest increase in computation.
- The rule-based controller keeps the vehicle on the lane under the illumination conditions covered by the experiments.
Where Pith is reading between the lines
- Similar lightweight pipelines could lower the hardware cost of adding basic autonomous capabilities to production vehicles.
- Extending the same approach to additional perception tasks such as obstacle detection would be a direct next step.
Load-bearing premise
The custom dataset captured from the vehicle's onboard camera is representative of real-world conditions and the manually chosen thresholds and rule-based controller remain stable outside the tested illumination and road scenarios.
What would settle it
Running the same pipeline on roads with different lane markings, lighting, or weather and observing lane offset RMSE above 3.16 percent or live sign accuracy below 90 percent would show the performance claims do not hold generally.
Figures




read the original abstract
Autonomous vehicles (AVs) rely on real-time perception systems to understand road environments and ensure safe navigation. However, implementing reliable perception algorithms on resource-constrained embedded platforms remains challenging due to limited computational resources. This paper presents a lightweight vision-based framework that integrates lane detection, lane tracking, and traffic sign recognition for embedded autonomous vehicles. A computationally efficient threshold-based lane segmentation method combined with perspective transformation and histogram-based curvature estimation is used for robust lane tracking under varying illumination conditions. A rule-based steering controller generates steering commands to maintain stable vehicle navigation. For traffic sign recognition, two lightweight convolutional neural networks (CNNs), EfficientNet-B0 and MobileNetV2, are evaluated using a custom dataset captured from the vehicle's onboard camera. Experimental results show that the system achieves real-time performance while maintaining accurate lane tracking with only 3.16% maximum offset RMSE. EfficientNet-B0 achieves a high offline classification accuracy of 98.77% on the test dataset, while achieving 90% accuracy during real-time on-device deployment, outperforming MobileNetV2 in both settings. MobileNetV2, however, offers slightly faster inference and lower computational cost. These results highlight the effectiveness of lightweight vision-based perception pipelines for resource-constrained autonomous driving applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a lightweight vision-based framework for resource-constrained autonomous vehicles that integrates threshold-based lane segmentation, perspective transformation, histogram-based curvature estimation for lane tracking, a rule-based steering controller, and lightweight CNNs (EfficientNet-B0 and MobileNetV2) for traffic sign recognition on a custom onboard-camera dataset. It claims real-time performance with 3.16% maximum offset RMSE for lane tracking and reports 98.77% offline and 90% on-device classification accuracy for EfficientNet-B0 (outperforming MobileNetV2).
Significance. If the results hold under broader conditions, the work provides a practical demonstration of efficient perception pipelines suitable for embedded AV hardware, with concrete on-device deployment metrics and a direct comparison of two lightweight CNNs offering useful guidance for low-resource applications. The emphasis on real-time operation and custom dataset evaluation is a strength.
major comments (3)
- [Methods] Methods section (lane segmentation and curvature estimation): The pipeline relies on manually chosen thresholds for segmentation and histogram binning/peak-detection parameters (explicitly listed as free parameters), yet no sensitivity analysis, ablation studies, or quantitative robustness metrics across illumination/road variations are reported. This directly affects the load-bearing claim of 'robust lane tracking under varying illumination conditions' and the generalization of the 3.16% RMSE result beyond the custom dataset.
- [Experimental Results] Experimental results: The headline metrics (3.16% max offset RMSE, 98.77% offline accuracy, 90% on-device accuracy) are presented without dataset size, train/test split details, baseline comparisons against other lane detectors or CNNs, or error bars from multiple runs. This makes it difficult to assess whether the numbers support the claims of accurate real-time performance and superiority for the resource-constrained AV use case.
- [Results] Results/Discussion: No hold-out testing on sequences from different lighting, road, or weather conditions is described, nor is there evaluation of the rule-based controller's stability outside the tested scenarios. This is critical for the assertion of 'stable vehicle navigation' in real-world conditions.
minor comments (2)
- [Abstract] Clarify the exact definition of 'maximum offset RMSE' (e.g., is it the peak instantaneous error or a normalized aggregate) in the abstract and results.
- [Results] The paper would benefit from a table comparing inference times, model sizes, and accuracy for EfficientNet-B0 vs. MobileNetV2 to make the trade-off discussion more precise.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which highlights important areas for strengthening the presentation of our methods and results. We address each major comment point-by-point below, indicating planned revisions to the manuscript.
read point-by-point responses
-
Referee: [Methods] Methods section (lane segmentation and curvature estimation): The pipeline relies on manually chosen thresholds for segmentation and histogram binning/peak-detection parameters (explicitly listed as free parameters), yet no sensitivity analysis, ablation studies, or quantitative robustness metrics across illumination/road variations are reported. This directly affects the load-bearing claim of 'robust lane tracking under varying illumination conditions' and the generalization of the 3.16% RMSE result beyond the custom dataset.
Authors: We agree that a dedicated sensitivity analysis would better substantiate the robustness claims. The thresholds and histogram parameters were selected via empirical tuning on the custom dataset, which includes multiple illumination and road variations. In the revised manuscript, we will add an ablation study on the key free parameters (e.g., color thresholds and peak-detection bins) together with quantitative metrics showing performance variation under different conditions, thereby supporting the reported 3.16% RMSE more rigorously. revision: partial
-
Referee: [Experimental Results] Experimental results: The headline metrics (3.16% max offset RMSE, 98.77% offline accuracy, 90% on-device accuracy) are presented without dataset size, train/test split details, baseline comparisons against other lane detectors or CNNs, or error bars from multiple runs. This makes it difficult to assess whether the numbers support the claims of accurate real-time performance and superiority for the resource-constrained AV use case.
Authors: We will revise the experimental results section to explicitly report the full dataset size, the train/validation/test split ratios, and direct comparisons against standard baselines (e.g., other threshold-based and learning-based lane detectors, plus additional lightweight CNNs). We will also include error bars computed from multiple independent runs to convey statistical reliability of the 3.16% RMSE and accuracy figures. revision: yes
-
Referee: [Results] Results/Discussion: No hold-out testing on sequences from different lighting, road, or weather conditions is described, nor is there evaluation of the rule-based controller's stability outside the tested scenarios. This is critical for the assertion of 'stable vehicle navigation' in real-world conditions.
Authors: The custom onboard-camera dataset was collected across a range of illumination and road conditions to support the robustness claims; the reported metrics reflect performance on held-out portions of this data. We acknowledge that explicit testing on entirely separate sequences with adverse weather (e.g., rain or night) and a dedicated stability analysis of the rule-based controller would further strengthen the work. In revision we will add a limitations subsection discussing these aspects and, where feasible, include additional controller evaluation on the existing varied sequences. revision: partial
Circularity Check
No significant circularity; results are direct experimental measurements
full rationale
The paper presents a lightweight vision pipeline with threshold-based segmentation, histogram curvature estimation, rule-based control, and CNN classification on a custom dataset. All headline metrics (3.16% max offset RMSE, 98.77% offline accuracy, 90% on-device accuracy) are reported as direct empirical outcomes from testing and deployment rather than quantities derived from fitted parameters that are then re-labeled as predictions. No equations, self-citations, or uniqueness theorems are invoked that reduce the central claims back to the inputs by construction. Manually selected thresholds are acknowledged as design choices but do not create definitional loops in the reported performance numbers.
Axiom & Free-Parameter Ledger
free parameters (2)
- lane segmentation thresholds
- histogram binning and peak-detection parameters
axioms (1)
- domain assumption A flat-road homography accurately maps the camera image to a top-down view for lane geometry
Reference graph
Works this paper leans on
-
[1]
IEEE Open Journal of Intelligent Transportation Systems (2025)
Kabir, M.R., Ravi, B.B.Y., Ray, S.: Digital twin technologies for vehicular proto- typing: A survey. IEEE Open Journal of Intelligent Transportation Systems (2025)
2025
-
[2]
Marti,E.,DeMiguel,M.A.,Garcia,F.,Perez,J.:Areviewofsensortechnologiesfor perceptioninautomateddriving.IEEEintelligenttransportationsystemsmagazine 11(4), 94–108 (2019)
2019
-
[3]
Annual Reviews in Control44, 323–341 (2017) Vision-Based Lane Following and Traffic Sign Recognition for AVs 15
Gruyer, D., Magnier, V., Hamdi, K., Claussmann, L., Orfila, O., Rakotonirainy, A.: Perception, information processing and modeling: Critical stages for autonomous driving applications. Annual Reviews in Control44, 323–341 (2017) Vision-Based Lane Following and Traffic Sign Recognition for AVs 15
2017
-
[4]
In: International Conference On Innovative Computing And Communication
More, P., More, R., Sonavane, S., Kalasgonda, M., More, S.: Optimizing road sign detection with convolutional neural networks (cnn). In: International Conference On Innovative Computing And Communication. pp. 231–243. Springer (2025)
2025
-
[5]
IEEE Access12, 117572–117580 (2024)
Gao, Q., Hu, H., Liu, W.: Traffic sign detection under adverse environmental con- ditions based on cnn. IEEE Access12, 117572–117580 (2024)
2024
-
[6]
Iandola, F.N., Moskewicz, M.W., Ashraf, K., Han, S., Dally, W.J., Keutzer, K.: Squeezenet: Alexnet-level accuracy with 50x fewer parameters and <1mb model size. ArXivabs/1602.07360(2016),https://api.semanticscholar.org/ CorpusID:14136028
-
[7]
MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
Howard, A.G., Zhu, M., Chen, B., Kalenichenko, D., Wang, W., Weyand, T., An- dreetto, M., Adam, H.: Mobilenets: Efficient convolutional neural networks for mobile vision applications. In: arXiv preprint arXiv:1704.04861 (2017)
work page internal anchor Pith review arXiv 2017
-
[8]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2018)
Zhang, X., Zhou, X., Lin, M., Sun, J.: Shufflenet: An extremely efficient convolu- tional neural network for mobile devices. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2018)
2018
-
[9]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2018)
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., Chen, L.C.: Mobilenetv2: In- verted residuals and linear bottlenecks. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2018)
2018
-
[10]
In: International Conference on Machine Learning (ICML) (2019)
Tan, M., Le, Q.V.: Efficientnet: Rethinking model scaling for convolutional neural networks. In: International Conference on Machine Learning (ICML) (2019)
2019
-
[11]
Computers & Electrical Engineering85, 106653 (2020)
Muthalagu, R., Bolimera, A., Kalaichelvi, V.: Lane detection technique based on perspective transformation and histogram analysis for self-driving cars. Computers & Electrical Engineering85, 106653 (2020)
2020
-
[12]
IEEE Access11, 67938– 67955 (2023)
Sultana, S., Ahmed, B., Paul, M., Islam, M.R., Ahmad, S.: Vision-based robust lane detection and tracking in challenging conditions. IEEE Access11, 67938– 67955 (2023)
2023
-
[13]
Multimedia Tools and Applications82(22), 33983– 34004 (2023)
Sapkal, A., Arti, Pawar, D., Singh, P.: Lane detection techniques for self-driving vehicle: comprehensive review. Multimedia Tools and Applications82(22), 33983– 34004 (2023)
2023
-
[14]
In: 2017 2nd international conference on automa- tion, cognitive science, optics, micro electro-mechanical system, and information technology (ICACOMIT)
Nugraha, B.T., Su, S.F., et al.: Towards self-driving car using convolutional neural network and road lane detector. In: 2017 2nd international conference on automa- tion, cognitive science, optics, micro electro-mechanical system, and information technology (ICACOMIT). pp. 65–69. IEEE (2017)
2017
-
[15]
Journal of Intelligent & Fuzzy Systems 46(3), 5975–5984 (2024)
Yu, Z., Ye, T.: Autonomous traffic sign detection for self-driving car system using convolutional neural network algorithm. Journal of Intelligent & Fuzzy Systems 46(3), 5975–5984 (2024)
2024
-
[16]
omidian et al
Omidian, F., Abdi, A., Hamed-Rouhbakhs, A.: Adapts: adaptive approximate computing-based traffic sign recognition unit for self-driving cars: F. omidian et al. The Journal of Supercomputing81(14), 1339 (2025)
2025
-
[17]
In: 2019 International Conference on Electromechanical and Energy Systems (SIELMEN)
Tiron, G.Z., Poboroniuc, M.S.: Neural network based traffic sign recognition for autonomous driving. In: 2019 International Conference on Electromechanical and Energy Systems (SIELMEN). pp. 1–5. IEEE (2019)
2019
-
[18]
International Journal of Knowledge-based and Intelligent Engineering Systems22(3), 205–214 (2018)
Farag, W.: Recognition of traffic signs by convolutional neural nets for self-driving vehicles. International Journal of Knowledge-based and Intelligent Engineering Systems22(3), 205–214 (2018)
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.