Recognition: unknown
Keypoint-based Dynamic Object 6-DoF Pose Tracking via Event Camera
Pith reviewed 2026-05-08 08:20 UTC · model grok-4.3
The pith
Event cameras with keypoint detection and density tracking deliver accurate 6-DoF poses for moving objects.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The pipeline detects keypoints on the event time surface with a dedicated network, tracks them continuously using polarity, coordinates, and surrounding event density, establishes a hash mapping from 2D observations to 3D model points, and applies the EPnP algorithm to recover the object's 6-DoF pose. This yields higher accuracy and greater robustness than prior event-based methods in both simulated and real environments.
What carries the argument
Keypoint detection network on event time surfaces combined with density-based continuous tracking and EPnP pose solving from 2D-to-3D hash mapping
If this is right
- Robots can maintain precise 6-DoF estimates of objects that move rapidly or pass through low-light regions.
- Tracking continues without explicit drift-correction modules under the tested speed and lighting variations.
- The same pipeline works on both synthetic event data and data from physical event cameras.
- Overall accuracy and failure rate improve relative to existing event-camera-only pose trackers.
Where Pith is reading between the lines
- The technique could be extended to several objects at once if an association step groups keypoints belonging to each object.
- Occasional fusion with sparse RGB frames might reduce any long-term drift that appears outside the evaluated scenarios.
- Low-latency pose output would suit real-time control loops in manipulation or navigation tasks involving moving targets.
Load-bearing premise
The keypoint network produces reliable correspondences that do not drift over time and that local event density alone is enough to keep tracking stable without separate correction steps.
What would settle it
A recorded high-speed motion sequence in which the detected keypoints lose consistent identity across frames and the resulting pose error exceeds that of competing event methods would show the performance advantage does not hold.
Figures



read the original abstract
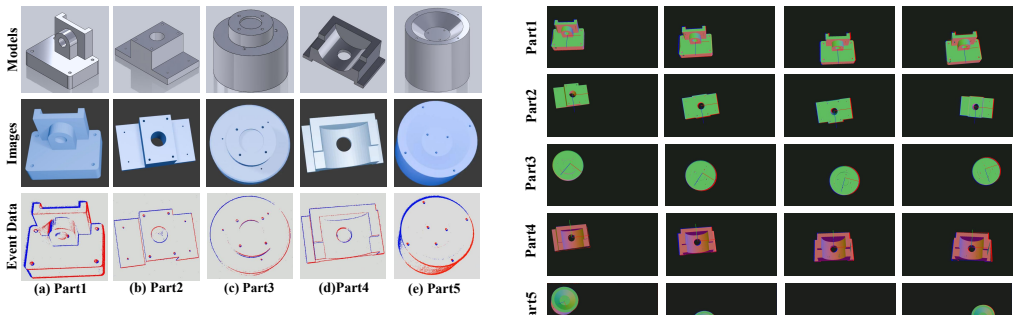
Accurate 6-DoF pose estimation of objects is critical for robots to perform precise manipulation tasks. However, for dynamic object pose estimation, conventional camera-based approaches face several major challenges, such as motion blur, sensor noise, and low-light limitation. To address these issues, we employ event cameras, whose high dynamic range and low latency offer a promising solution. Furthermore, we propose a keypoint-based detection and tracking approach for dynamic object pose estimation. Firstly, a keypoint detection network is constructed to extract keypoints from the time surface generated by the event stream. Subsequently, the polarity and spatial coordinates of the events are leveraged, and the event density in the vicinity of each keypoint is utilized to achieve continuous keypoint tracking. Finally, a hash mapping is established between the 2D keypoints and the 3D model keypoints, and the EPnP algorithm is employed to estimate the 6-DoF pose. Experimental results demonstrate that, whether in simulated or real event environments, the proposed method outperforms the event-based state-of-the-art methods in terms of both accuracy and robustness.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a keypoint-based pipeline for 6-DoF pose tracking of dynamic objects with event cameras. Keypoints are detected by a neural network operating on time surfaces derived from the event stream; tracking is performed by combining event polarity, spatial coordinates, and local event density; a hash map then links the resulting 2D keypoints to a 3D object model, after which EPnP solves for the pose. The central claim is that the method outperforms existing event-based approaches in both accuracy and robustness on simulated and real data.
Significance. If the performance claims hold, the work would be a useful contribution to event-based vision for robotics, exploiting the high temporal resolution of event sensors to mitigate motion blur and low-light issues that affect conventional cameras. The modular separation of detection and density-based tracking, together with reliance on the standard EPnP solver, is a positive design choice that avoids circularity. However, the significance is currently limited by the absence of quantitative evidence supporting the superiority and robustness assertions.
major comments (2)
- [Abstract] Abstract: The assertion that 'Experimental results demonstrate that... the proposed method outperforms the event-based state-of-the-art methods in terms of both accuracy and robustness' is presented without any numerical metrics (e.g., mean rotation/translation error, success rate, or comparison tables), ablation studies, or error analysis. This absence directly prevents verification of the central claim.
- [Method] Method description: The continuous keypoint tracking stage relies on local event density around each detected keypoint to maintain correspondences, yet the text provides no explicit analysis, experiments, or failure-mode handling for drift accumulation, varying event rates, partial occlusions, or speed changes. Because these correspondences are fed directly to EPnP, the lack of validation undermines the robustness claim.
minor comments (1)
- The description of the hash mapping between 2D and 3D keypoints would benefit from a diagram or pseudocode to improve clarity and reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment point-by-point below, indicating the changes we will make in the revised version.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that 'Experimental results demonstrate that... the proposed method outperforms the event-based state-of-the-art methods in terms of both accuracy and robustness' is presented without any numerical metrics (e.g., mean rotation/translation error, success rate, or comparison tables), ablation studies, or error analysis. This absence directly prevents verification of the central claim.
Authors: We acknowledge that the abstract summarizes the results at a high level without specific numbers, which is standard practice for brevity. The full manuscript provides the requested quantitative evidence in the Experiments section, including tables with mean rotation/translation errors, success rates, direct comparisons to event-based state-of-the-art methods on simulated and real data, ablation studies, and error analysis. We will revise the abstract to include a concise reference to these key metrics and improvements to better support the claim. revision: yes
-
Referee: [Method] Method description: The continuous keypoint tracking stage relies on local event density around each detected keypoint to maintain correspondences, yet the text provides no explicit analysis, experiments, or failure-mode handling for drift accumulation, varying event rates, partial occlusions, or speed changes. Because these correspondences are fed directly to EPnP, the lack of validation undermines the robustness claim.
Authors: We agree that the method section would benefit from additional validation of the density-based tracking. In the revised manuscript, we will add explicit analysis and experiments addressing drift accumulation, robustness to varying event rates (via adaptive thresholds), partial occlusions, and speed variations. We will also include a dedicated discussion of failure modes and how the tracking maintains reliable correspondences for input to EPnP. These additions will directly support the robustness assertions. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents a pipeline of independent components: a keypoint detection network operating on event time surfaces, followed by polarity/spatial/density-based tracking to maintain 2D correspondences, a hash map to 3D model points, and the standard EPnP solver for 6-DoF pose. No equations, parameters, or claims reduce by construction to their own inputs; the outperformance statement rests on experimental comparisons rather than a self-referential derivation. No self-citation load-bearing steps, uniqueness theorems, or ansatz smuggling are present in the provided description. The central claim remains externally falsifiable via the reported accuracy/robustness metrics on simulated and real data.
Axiom & Free-Parameter Ledger
free parameters (1)
- Keypoint detection network weights
axioms (1)
- standard math EPnP algorithm recovers accurate 6-DoF pose given sufficient 2D-3D point correspondences
Reference graph
Works this paper leans on
-
[1]
Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: a review,
G. Du, K. Wang, S. Lian, and K. Zhao, “Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: a review,”Artificial Intelligence Review, vol. 54, no. 3, pp. 1677–1734, 2021
2021
-
[2]
Learning to assemble: Estimating 6d poses for robotic object-object manipulation,
S. Stev ˇsi´c, S. Christen, and O. Hilliges, “Learning to assemble: Estimating 6d poses for robotic object-object manipulation,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 1159–1166, 2020
2020
-
[3]
Repetitive assembly action recognition based on object detection and pose estimation,
C. Chen, T. Wang, D. Li, and J. Hong, “Repetitive assembly action recognition based on object detection and pose estimation,”Journal of Manufacturing Systems, vol. 55, pp. 325–333, 2020
2020
-
[4]
Yolo-6d-pose: Enhancing yolo for single-stage monocular multi-object 6d pose estimation,
D. Maji, S. Nagori, M. Mathew, and D. Poddar, “Yolo-6d-pose: Enhancing yolo for single-stage monocular multi-object 6d pose estimation,” in2024 International Conference on 3D Vision (3DV). IEEE, 2024, pp. 1616–1625
2024
-
[5]
Real-time monocular object instance 6d pose estimation,
T.-T. Do, T. Pham, M. Cai, and I. Reid, “Real-time monocular object instance 6d pose estimation,” inBritish Machine Vision Conference
-
[6]
British Machine Vision Association, 2018
2018
-
[7]
6d pose estimation for vision-guided robot grasping based on monocular camera,
S. Wang, J. Liu, Q. Lu, Z. Liu, Y . Zeng, D. Zhang, and B. Chen, “6d pose estimation for vision-guided robot grasping based on monocular camera,” in2023 6th International Conference on Robotics, Control and Automation Engineering (RCAE). IEEE, 2023, pp. 13–17
2023
-
[8]
Extending 6d object pose estimators for stereo vision,
T. P ¨ollabauer, J. Emrich, V . Knauthe, and A. Kuijper, “Extending 6d object pose estimators for stereo vision,” inInternational Conference on Pattern Recognition and Artificial Intelligence. Springer, 2024, pp. 106–119
2024
-
[9]
6d-vision: Fusion of stereo and motion for robust environment perception,
U. Franke, C. Rabe, H. Badino, and S. Gehrig, “6d-vision: Fusion of stereo and motion for robust environment perception,” inJoint Pattern Recognition Symposium. Springer, 2005, pp. 216–223
2005
-
[10]
A probabilistic framework for stereo- vision based 3d object search with 6d pose estimation,
J. Ma and J. W. Burdick, “A probabilistic framework for stereo- vision based 3d object search with 6d pose estimation,” in2010 IEEE International Conference on Robotics and Automation. IEEE, 2010, pp. 2036–2042
2010
-
[11]
Wide-depth- range 6d object pose estimation in space,
Y . Hu, S. Speierer, W. Jakob, P. Fua, and M. Salzmann, “Wide-depth- range 6d object pose estimation in space,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 15 870–15 879
2021
-
[12]
Homebreweddb: Rgb-d dataset for 6d pose estimation of 3d objects,
R. Kaskman, S. Zakharov, I. Shugurov, and S. Ilic, “Homebreweddb: Rgb-d dataset for 6d pose estimation of 3d objects,” inProceedings of the IEEE/CVF International Conference on Computer Vision Work- shops, 2019, pp. 0–0
2019
-
[13]
Real-time 3d reconstruc- tion and 6-dof tracking with an event camera,
H. Kim, S. Leutenegger, and A. J. Davison, “Real-time 3d reconstruc- tion and 6-dof tracking with an event camera,” inEuropean conference on computer vision. Springer, 2016, pp. 349–364
2016
-
[14]
Event- based vision: A survey,
G. Gallego, T. Delbr ¨uck, G. Orchard, C. Bartolozzi, B. Taba, A. Censi, S. Leutenegger, A. J. Davison, J. Conradt, K. Daniilidiset al., “Event- based vision: A survey,”IEEE transactions on pattern analysis and machine intelligence, vol. 44, no. 1, pp. 154–180, 2020
2020
-
[15]
Cs3d: An efficient facial expression recognition via event vision,
Z. Wang, Q. Song, Y . Peng, and W. Bai, “Cs3d: An efficient facial expression recognition via event vision,”arXiv preprint arXiv:2512.09592, 2025
-
[16]
Line-based 6- dof object pose estimation and tracking with an event camera,
Z. Liu, B. Guan, Y . Shang, Q. Yu, and L. Kneip, “Line-based 6- dof object pose estimation and tracking with an event camera,”IEEE Transactions on Image Processing, 2024
2024
-
[17]
Stereo event-based, 6-dof pose tracking for uncooperative spacecraft,
Z. Liu, B. Guan, Y . Shang, Y . Bian, P. Sun, and Q. Yu, “Stereo event-based, 6-dof pose tracking for uncooperative spacecraft,”IEEE Transactions on Geoscience and Remote Sensing, 2025
2025
-
[18]
Edopt: Event-camera 6-dof dynamic object pose tracking,
A. Glover, L. Gava, Z. Li, and C. Bartolozzi, “Edopt: Event-camera 6-dof dynamic object pose tracking,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 18 200–18 206
2024
-
[19]
Contourpose: Monocular 6-d pose estimation method for reflective textureless metal parts,
Z. He, Q. Li, X. Zhao, J. Wang, H. Shen, S. Zhang, and J. Tan, “Contourpose: Monocular 6-d pose estimation method for reflective textureless metal parts,”IEEE Transactions on Robotics, vol. 39, no. 5, pp. 4037–4050, 2023
2023
-
[20]
Epro- pnp: Generalized end-to-end probabilistic perspective-n-points for monocular object pose estimation,
H. Chen, P. Wang, F. Wang, W. Tian, L. Xiong, and H. Li, “Epro- pnp: Generalized end-to-end probabilistic perspective-n-points for monocular object pose estimation,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2022, pp. 2781–2790
2022
-
[21]
Neuromorphic event-based 3d pose estimation,
D. Reverter Valeiras, G. Orchard, S.-H. Ieng, and R. B. Benosman, “Neuromorphic event-based 3d pose estimation,”Frontiers in neuro- science, vol. 9, p. 522, 2016
2016
-
[22]
An event-based solution to the perspective-n-point problem,
D. Reverter Valeiras, S. Kime, S.-H. Ieng, and R. B. Benosman, “An event-based solution to the perspective-n-point problem,”Frontiers in neuroscience, vol. 10, p. 208, 2016
2016
-
[23]
Spades: A realistic spacecraft pose estimation dataset using event sensing,
A. Rathinam, H. Qadadri, and D. Aouada, “Spades: A realistic spacecraft pose estimation dataset using event sensing,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 11 760–11 766
2024
-
[24]
Cross- modal fusion of monocular images and neuromorphic streams for 6d pose estimation of non-cooperative targets,
W. Yishi, M. Maestrini, Z. Zexu, M. Massari, and P. Di Lizia, “Cross- modal fusion of monocular images and neuromorphic streams for 6d pose estimation of non-cooperative targets,”Aerospace Science and Technology, p. 110338, 2025
2025
-
[25]
MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
A. G. Howard, M. Zhu, B. Chen, D. Kalenichenko, W. Wang, T. Weyand, M. Andreetto, and H. Adam, “Mobilenets: Efficient convolutional neural networks for mobile vision applications,”arXiv preprint arXiv:1704.04861, 2017
work page internal anchor Pith review arXiv 2017
-
[26]
Eca-net: Efficient channel attention for deep convolutional neural networks,
Q. Wang, B. Wu, P. Zhu, P. Li, W. Zuo, and Q. Hu, “Eca-net: Efficient channel attention for deep convolutional neural networks,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 11 534–11 542
2020
-
[27]
S. Mehta and M. Rastegari, “Mobilevit: light-weight, general- purpose, and mobile-friendly vision transformer,”arXiv preprint arXiv:2110.02178, 2021
-
[28]
Recent event camera innovations: A survey,
B. Chakravarthi, A. A. Verma, K. Daniilidis, C. Fermuller, and Y . Yang, “Recent event camera innovations: A survey,” inEuropean Conference on Computer Vision. Springer, 2025, pp. 342–376
2025
-
[29]
Tinyu-net: Lighter yet better u-net with cascaded multi-receptive fields,
J. Chen, R. Chen, W. Wang, J. Cheng, L. Zhang, and L. Chen, “Tinyu-net: Lighter yet better u-net with cascaded multi-receptive fields,” inInternational Conference on Medical Image Computing and Computer-Assisted Intervention. Springer, 2024, pp. 626–635
2024
-
[30]
v2e: From video frames to realistic dvs events,
Y . Hu, S.-C. Liu, and T. Delbruck, “v2e: From video frames to realistic dvs events,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2021, pp. 1312–1321
2021
-
[31]
A benchmark for the evaluation of rgb-d slam systems,
J. Sturm, N. Engelhard, F. Endres, W. Burgard, and D. Cremers, “A benchmark for the evaluation of rgb-d slam systems,” in2012 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2012, pp. 573–580
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.