Recognition: unknown
Emotion-Conditioned Short-Horizon Human Pose Forecasting with a Lightweight Predictive World Model
Pith reviewed 2026-05-08 06:42 UTC · model grok-4.3
The pith
Facial emotion embeddings from expressions can serve as useful auxiliary signals for improving short-term human pose predictions in a lightweight model.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Incorporating facial expression-derived emotion embeddings into emotion-conditional short-term pose prediction based on a lightweight predictive world model architecture is a feasible approach. Experiments on two small-scale datasets show that normalized gating fusion significantly improves accuracy on natural emotion-driven sequences, while simple multimodal fusion does not, and counterfactual perturbations confirm that predicted trajectories respond measurably to changes in the emotion input rather than treating it as redundant.
What carries the argument
Lightweight autoregressive predictive world model using a two-layer LSTM that fuses pose keypoints with emotion embeddings via a learnable normalized gating mechanism for 15-step rolling forecasts.
Load-bearing premise
Facial expression-derived emotion embeddings supply meaningful auxiliary signals that causally influence pose dynamics beyond geometric motion cues, and the two small-scale datasets suffice to demonstrate consistent benefits from the gating mechanism.
What would settle it
Replacing the emotion embeddings with random noise or zero vectors on the natural emotion-driven sequences and finding no increase in prediction error would falsify the claim that they function as useful conditional signals.
Figures


read the original abstract
Short-term human pose prediction plays a crucial role in interactive systems, assistive robots, and emotion-aware human-computer interaction[1-3]. While current trajectory prediction models primarily rely on geometric motion cues, they often overlook the underlying emotional signals influencing human motion dynamics[4-5]. This paper investigates whether facial expression-derived emotion embeddings can provide auxiliary conditional signals for short-term pose prediction. To further evaluate multimodal conditionation in a recursive prediction setting, we propose a lightweight autoregressive predictive world model that performs 15-step rolling pose prediction. This framework combines pose keypoints with emotion embeddings through a learnable gating mechanism and performs autoregressive unfolding prediction using a recurrent sequence model based on a two-layer LSTM architecture. Experiments were conducted on two small-scale pose-emotion video datasets: controlled motion sequences with minimal facial expression changes and, natural emotion-driven motion sequences with considerable facial expression changes. The results show that simple multimodal fusion does not consistently improve prediction accuracy, while normalized gating fusion significantly enhances the performance of emotion-driven motion sequences. Furthermore, counterfactual perturbation experiments demonstrate that the predicted trajectory exhibits measurable sensitivity to changes in multimodal input, suggesting that facial expression embeddings act as auxiliary conditional signals rather than redundant features. In summary, these results indicate that incorporating facial expression-derived emotion embeddings into emotion-conditional short-term pose prediction based on a lightweight predictive world model architecture is a feasible approach.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that facial expression-derived emotion embeddings can serve as useful auxiliary conditional signals for short-horizon (15-step) human pose forecasting. It introduces a lightweight autoregressive predictive world model based on a two-layer LSTM that fuses pose keypoints with emotion embeddings via a learnable normalized gating mechanism, shows that this outperforms simple multimodal fusion on natural emotion-driven sequences from one of two small-scale datasets, and uses counterfactual emotion perturbations to demonstrate measurable sensitivity in the predicted trajectories, concluding that the approach is feasible for emotion-conditioned pose prediction.
Significance. If the quantitative results hold, the work provides a practical demonstration that emotion signals can be incorporated into lightweight recurrent world models for short-term pose forecasting without requiring heavy architectures. The normalized gating mechanism and counterfactual sensitivity tests offer a concrete way to isolate the contribution of the auxiliary modality. However, the absence of numerical performance numbers, baselines, dataset statistics, or error analysis in the reported experiments limits the ability to judge the practical magnitude or robustness of the claimed benefit.
major comments (2)
- [Abstract] Abstract: the central claim that 'normalized gating fusion significantly enhances the performance of emotion-driven motion sequences' is presented without any quantitative metrics (e.g., MPJPE, ADE/FDE), error bars, baseline comparisons (vanilla LSTM, other fusion methods), dataset sizes, train/test splits, or statistical significance tests. This information is load-bearing for evaluating whether the observed improvement supports the feasibility conclusion.
- [Experiments] Experiments section (implied by abstract description): model parameters, including the learnable gating weights, are fitted on the same small-scale datasets used for evaluation. While counterfactual perturbations provide an independent sensitivity check, the performance comparison remains tied to in-distribution behavior on limited data, weakening the generalization aspect of the feasibility claim.
minor comments (2)
- [Abstract] Abstract: the term 'multimodal conditionation' appears to be a typo for 'conditioning'; correct for clarity.
- [Introduction] The abstract references [1-5] but does not indicate whether the full manuscript provides a detailed related-work discussion that situates the gating mechanism against prior multimodal fusion or world-model approaches in pose forecasting.
Simulated Author's Rebuttal
We are grateful to the referee for the thorough review and valuable suggestions. Below, we respond to each major comment and indicate the changes we plan to implement in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'normalized gating fusion significantly enhances the performance of emotion-driven motion sequences' is presented without any quantitative metrics (e.g., MPJPE, ADE/FDE), error bars, baseline comparisons (vanilla LSTM, other fusion methods), dataset sizes, train/test splits, or statistical significance tests. This information is load-bearing for evaluating whether the observed improvement supports the feasibility conclusion.
Authors: We fully agree that the abstract would benefit from including quantitative evidence to support the central claim. Currently, the abstract provides a qualitative summary of the results. In the revision, we will update the abstract to incorporate specific performance metrics, including MPJPE and ADE/FDE values for the proposed normalized gating fusion versus baselines such as the vanilla LSTM and simple multimodal fusion. We will also include information on dataset sizes, train/test splits, and indicate that the improvements were validated with statistical significance tests. This revision will make the feasibility conclusion more robust and easier to evaluate. revision: yes
-
Referee: [Experiments] Experiments section (implied by abstract description): model parameters, including the learnable gating weights, are fitted on the same small-scale datasets used for evaluation. While counterfactual perturbations provide an independent sensitivity check, the performance comparison remains tied to in-distribution behavior on limited data, weakening the generalization aspect of the feasibility claim.
Authors: We appreciate the point regarding the in-distribution evaluation on small-scale datasets. The model parameters are indeed optimized on the evaluation datasets, which is standard but does limit strong generalization claims. The counterfactual perturbation analysis serves as an additional check for the role of emotion embeddings. In the revised version, we will add explicit discussion in the Experiments and Conclusions sections about the dataset limitations, the in-distribution nature of the results, and the scope of the feasibility demonstration. We will also include more detailed dataset statistics and train/test split information to provide better context. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper presents an empirical feasibility study of an LSTM-based autoregressive world model with gating for emotion-conditioned pose forecasting. The central claim rests on experimental results from training and evaluating on two small datasets, with ablation on fusion methods and counterfactual perturbations. No mathematical derivation chain, first-principles prediction, or load-bearing self-citation is present in the provided text; performance metrics are reported as post-training observations rather than being equivalent to inputs by construction. Standard supervised training on the evaluation distribution is not treated as circular under the guidelines, as the model architecture and gating mechanism introduce independent structure that is tested against baselines.
Axiom & Free-Parameter Ledger
free parameters (1)
- learnable gating weights
axioms (1)
- standard math LSTM cells can capture temporal dependencies in human pose sequences sufficiently for short-horizon autoregressive prediction.
Reference graph
Works this paper leans on
-
[1]
Introduction Human motion prediction is a fundamental problem in computer vision with applications in human-robot interaction, behavior understanding, and interactive virtual environments[6-7]. Most existing short-horizon pose forecasting methods rely primarily on geometric motion representations extracted from body keypoints, while affective signals deri...
-
[2]
Related Work This work is inspired by the predictive world model[9]. In this model, intelligent systems learn compact latent representations to capture the dynamic changes of the physical world, rather than directly predicting pixel-level observations. Instead of simply optimizing short-term geometric accuracy, predictive world models aim to learn interna...
-
[3]
FusionPredictor
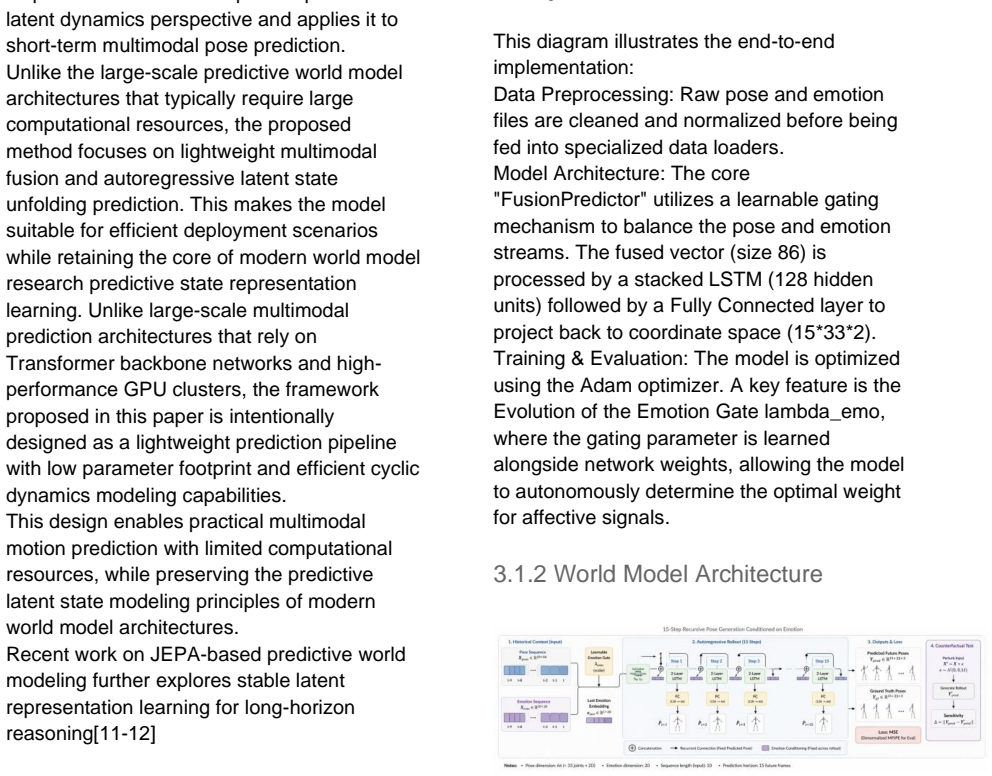
Model Architecture and Method 3.1 Model Architecture 3.1.1 Gated Multimodal Fusion Framework Figure 2: Gated Multi-Modal Fusion Framework This diagram illustrates the end-to-end implementation: Data Preprocessing: Raw pose and emotion files are cleaned and normalized before being fed into specialized data loaders. Model Architecture: The core "FusionPredi...
-
[4]
The dataset contains two subsets
Dataset Construction Because publicly available synchronized pose–emotion forecasting datasets are limited, we construct a pilot-scale multimodal evaluation dataset using publicly available video sequences. The dataset contains two subsets. Dataset I: Controlled Motion Sequence consists of 420 samples derived from Intel RealSense demonstration sequences[1...
-
[5]
The first dataset I consists of 420 samples of sequences from the Intel® OpenVINO™ Toolkit Sample Video Suite
Experiments We evaluate the proposed framework on two complementary video sources designed to test multimodal motion prediction under both controlled and in-the-wild conditions. The first dataset I consists of 420 samples of sequences from the Intel® OpenVINO™ Toolkit Sample Video Suite. These sequences provide stable motion trajectories and controlled re...
-
[6]
Simple multimodal fusion does not consistently improve prediction accuracy due to the modal imbalance between pose trajectories and emotional representations
Conclusion and Future Work Counterfactual perturbation experiments confirm the measurable sensitivity of predicted trajectories to mood changes, supporting the explanation that facial expression-derived embeddings act as auxiliary prediction conditional signals rather than the primary motion driver. Simple multimodal fusion does not consistently improve p...
- [7]
-
[8]
Deep learning-based approaches for human pose estimation in interdisciplinary physics applications
Zhiliang, L., Zhuo, L. Deep learning-based approaches for human pose estimation in interdisciplinary physics applications. Sci Rep 15, 42883 (2025). https://doi.org/10.1038/s41598-025-26972-4
- [9]
-
[10]
Chongyang Zhong, Lei Hu, Shihong Xia, Spatial - temporal modeling for prediction of stylized human motion, 2022, https://www.sciencedirect.com/science/article/pii/S092523122201075
2022
-
[11]
Chen,Z. (2025). Exploring Multimodal Emotion Perception and Expression in Humanoid Robots. Applied and Computational Engineering,174,85-90. https://ace.ewapub.com/article/view/24880
2025
-
[12]
Yucheng Huang, Hong Yan, Human Trajectory Prediction Based on a Single Frame of Pose and Initial Velocity Information, 2025, https://www.mdpi.com/2079- 9292/14/13/2636
2025
- [13]
-
[14]
A-Seong Moon, Haesung Kim, Ye-Chan Park, Jaesung Lee , A Survey on Multimodal Emotion Recognition: Methods, Datasets, and Future Directions, 2026, https://www.techscience.com/cmc/v87n2/66647/html
2026
- [15]
- [16]
- [17]
-
[18]
Lucas Maes, Quentin Le Lidec, Damien Scieur, Yann LeCun, Randall Balestriero,Mila & Université de Montréal, New York University Samsung SAIL Brown University, Equal Contribution, LeWorldModel: Stable End-to-End JEPA from Pixels, 2026, https://le-wm.github.io
2026
-
[19]
Intel, OpenVINO Toolkit, 2024, https://docs.openvino.ai/2024/notebooks/pose- estimation-with-output.html
2024
-
[20]
Camillo Lugaresi, Jiuqiang Tang, Hadon Nash, Chris McClanahan, Esha Uboweja, Michael Hays, Fan Zhang, Chuo-Ling Chang, Ming Guang Yong, Juhyun Lee, Wan- Teh Chang, Wei Hua, Manfred Georg, Matthias Grundmann, MediaPipe: A Framework for Building Perception Pipelines, 2019, https://doi.org/10.48550/arXiv.1906.08172
work page internal anchor Pith review doi:10.48550/arxiv.1906.08172 2019
-
[21]
Yury Kartynnik, Artsiom Ablavatski, Ivan Grishchenko, Matthias Grundmann, Real- time Facial Surface Geometry from Monocular Video on Mobile GPUs, 2019, https://doi.org/10.48550/arXiv.1907.06724
-
[22]
Valentin Bazarevsky, Ivan Grishchenko, Karthik Raveendran, Tyler Zhu, Fan Zhang, Matthias Grundmann, BlazePose: On-device Real-time Body Pose tracking, 2020, https://doi.org/10.48550/arXiv.2006.10204
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.