Recognition: unknown
Unleashing the Agility of Wheeled-Legged Robots for High-Dynamic Reflexive Obstacle Evasion
Pith reviewed 2026-05-08 05:57 UTC · model grok-4.3
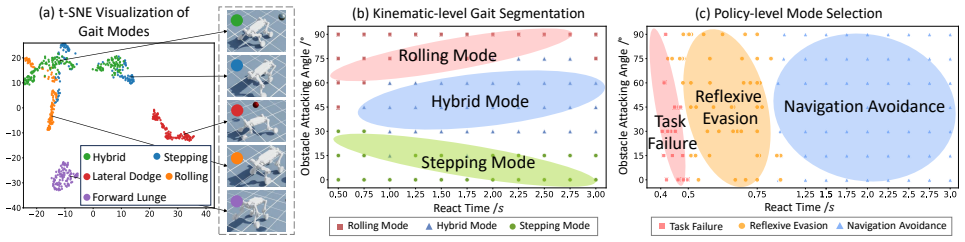
The pith
A hierarchical reinforcement learning framework lets wheeled-legged robots discover reflexive evasion behaviors such as forward lunges and lateral dodges.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The AWARE hierarchical reinforcement learning framework enables wheeled-legged robots to naturally exhibit diverse emergent gaits and evasive behaviors, including forward lunge and lateral dodge, thereby leveraging the robot's hybrid morphology to enhance agility under highly dynamic threats, with robust performance shown in simulation and real-world deployment.
What carries the argument
AWARE, the Adaptive Wheeled-Legged Avoidance and Reflexive Evasion hierarchical reinforcement learning framework, which trains policies that produce emergent reflexive evasion by bridging hybrid morphology, mode coupling, and non-holonomic constraints.
Load-bearing premise
The hierarchical reinforcement learning framework can sufficiently bridge the hybrid morphology, mode coupling, and non-holonomic constraints to produce robust real-world evasion without major sim-to-real failures or safety issues.
What would settle it
If real-world trials show frequent collisions with fast-moving obstacles or an absence of the described emergent behaviors such as forward lunges and lateral dodges, the claim of effective reflexive evasion would be disproven.
Figures






read the original abstract
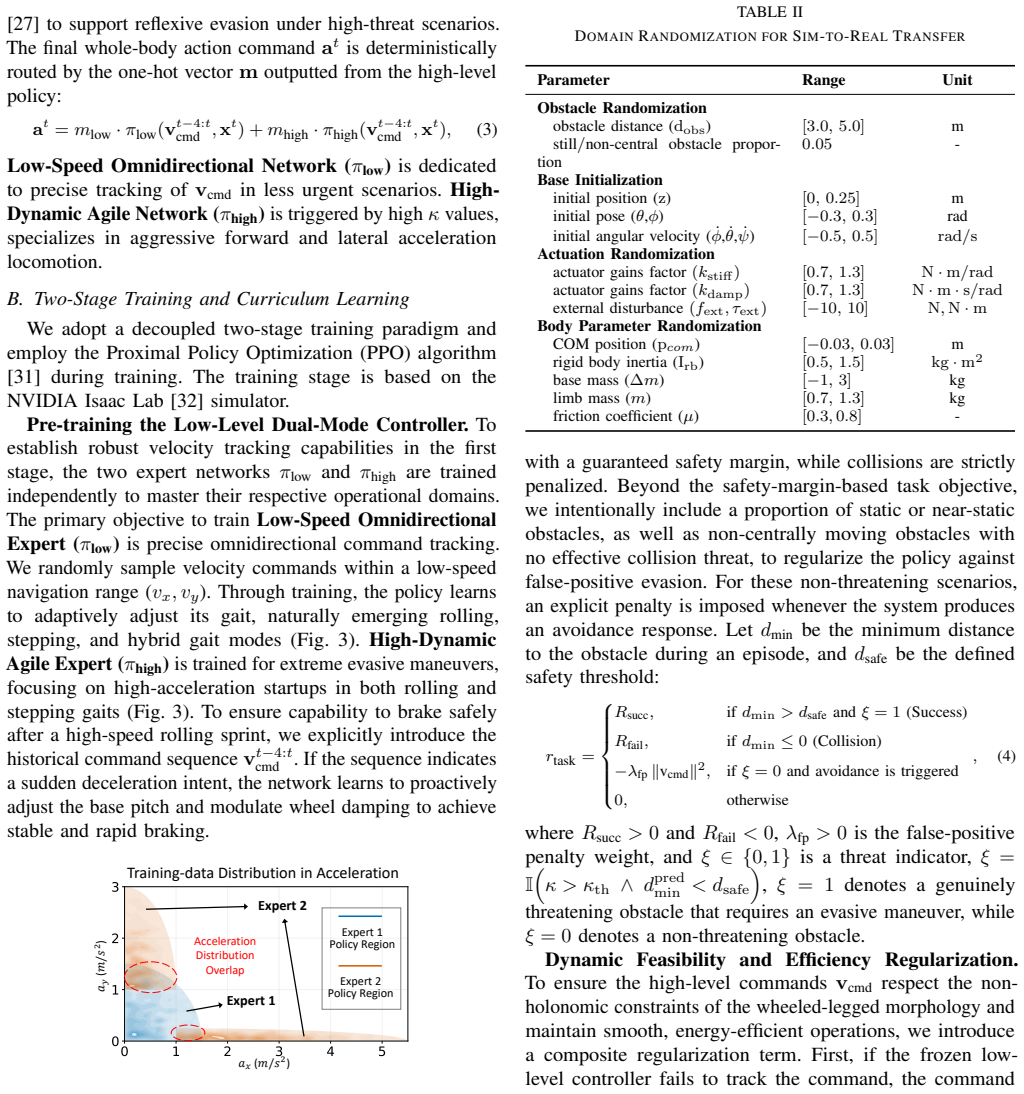
Wheeled-legged robots combine the energy efficiency of wheeled locomotion with the terrain adaptability of legged systems, making them promising platforms for agile mobility in complex and dynamic environments. However, enabling high-dynamic reflexive evasion against fast-moving obstacles remains challenging due to the hybrid morphology, mode coupling, and non-holonomic constraints of such platforms. In this work, we propose AWARE, Adaptive Wheeled-Legged Avoidance and Reflexive Evasion, a hierarchical reinforcement learning framework for high-dynamic obstacle avoidance in wheeled-legged robots. The proposed system naturally exhibits diverse emergent gaits and evasive behaviors, including forward lunge and lateral dodge, thereby leveraging the robot's hybrid morphology to enhance agility under highly dynamic threats. Extensive experiments in Isaac Lab simulation and real-world deployment on the M20 platform across diverse dynamic scenarios demonstrate that AWARE achieves robust and agile obstacle avoidance while revealing behaviorally distinct evasive strategies. These results highlight both the practical effectiveness of AWARE and the intrinsic reflexive agility of wheeled-legged robots.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents AWARE, a hierarchical reinforcement learning framework for high-dynamic reflexive obstacle evasion on wheeled-legged robots. It claims that the framework bridges hybrid morphology, mode coupling, and non-holonomic constraints to produce emergent gaits and evasive behaviors (e.g., forward lunge, lateral dodge), with validation via Isaac Lab simulations and real-world M20 hardware deployment across dynamic scenarios, including quantitative success rates and observed behavioral distinctions.
Significance. If the reported results hold, the work is significant for showing that hierarchical RL can yield practical, robust evasion on hybrid platforms without explicit programming of maneuvers. The real-world deployment on M20 hardware together with quantitative metrics constitutes falsifiable evidence, which is a clear strength over purely simulated studies. This advances understanding of reflexive agility in wheeled-legged systems and could inform downstream applications in dynamic environments.
minor comments (3)
- Abstract: the claim of 'robust and agile obstacle avoidance' and 'extensive experiments' would be strengthened by inserting one or two concrete numbers (e.g., success rate, average evasion time) rather than leaving them for the body only.
- §3 (or equivalent methods section): the interface between the high-level evasion-mode policy and the low-level gait controller is described at a high level; a short pseudocode block or explicit state-transition diagram would clarify how non-holonomic constraints are handled at each level.
- Figures 4–6 (behavioral results): ensure every sub-figure caption explicitly states the quantitative metric shown (success rate, collision count, etc.) and the number of trials, to allow immediate visual verification of the cross-scenario claims.
Simulated Author's Rebuttal
We thank the referee for their positive and constructive review of our manuscript on AWARE. We appreciate the acknowledgment of the framework's ability to produce emergent gaits and evasive behaviors through hierarchical RL, as well as the value placed on our real-world M20 hardware experiments and quantitative metrics. The recommendation for minor revision is noted, and we are prepared to address any remaining editorial points in the revised version.
Circularity Check
No significant circularity detected in derivation or claims
full rationale
The paper introduces AWARE, a hierarchical RL framework for reflexive obstacle evasion on wheeled-legged robots. No equations, derivations, or parameter-fitting steps are described that reduce by construction to inputs, self-definitions, or prior self-citations. The central claims rest on empirical validation via Isaac Lab simulation and real-world M20 hardware deployment, including observed emergent behaviors and quantitative success metrics. These constitute independent, falsifiable evidence outside any fitted values or internal definitions. No load-bearing self-citations, uniqueness theorems, or ansatz smuggling appear in the provided text. The architecture (high-level mode selection + low-level gait execution) is a standard decomposition for hybrid systems and does not collapse into tautology.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Max: A wheeled-legged quadruped robot for multimodal agile locomotion,
Q. Zhou, S. Yang, X. Jiang, D. Zhang, W. Chi, K. Chen, S. Zhang, J. Li, J. Zhang, R. Wanget al., “Max: A wheeled-legged quadruped robot for multimodal agile locomotion,”IEEE Transactions on Automation Science and Engineering, vol. 21, no. 4, pp. 7562–7582, 2023
2023
-
[2]
Hybrid driving-stepping locomotion with the wheeled-legged robot momaro,
M. Schwarz, T. Rodehutskors, M. Schreiber, and S. Behnke, “Hybrid driving-stepping locomotion with the wheeled-legged robot momaro,” in2016 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2016, pp. 5589–5595
2016
-
[3]
Balance control of a novel wheel-legged robot: Design and experiments,
S. Wang, L. Cui, J. Zhang, J. Lai, D. Zhang, K. Chen, Y . Zheng, Z. Zhang, and Z.-P. Jiang, “Balance control of a novel wheel-legged robot: Design and experiments,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 6782–6788
2021
-
[4]
Ascento: A two-wheeled jumping robot,
V . Klemm, A. Morra, C. Salzmann, F. Tschopp, K. Bodie, L. Gulich, N. Küng, D. Mannhart, C. Pfister, M. Vierneiselet al., “Ascento: A two-wheeled jumping robot,” in2019 International conference on robotics and automation (ICRA). IEEE, 2019, pp. 7515–7521
2019
-
[5]
Centauro: A hybrid locomotion and high power resilient manipulation platform,
N. Kashiri, L. Baccelliere, L. Muratore, A. Laurenzi, Z. Ren, E. M. Hoffman, M. Kamedula, G. F. Rigano, J. Malzahn, S. Cordascoet al., “Centauro: A hybrid locomotion and high power resilient manipulation platform,”IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1595–1602, 2019. (c) (d) (a) (b) Fig. 8. Real-robot experiments for high-dynamic obsta...
2019
-
[6]
Learning robust autonomous navigation and locomotion for wheeled- legged robots,
J. Lee, M. Bjelonic, A. Reske, L. Wellhausen, T. Miki, and M. Hutter, “Learning robust autonomous navigation and locomotion for wheeled- legged robots,”Science Robotics, vol. 9, no. 89, p. eadi9641, 2024
2024
-
[7]
Atros: Learning energy- efficient agile locomotion for wheeled-legged robots,
J. Sun, H. Ji, Z. Qu, C. Wang, and M. Zhang, “Atros: Learning energy- efficient agile locomotion for wheeled-legged robots,”arXiv preprint arXiv:2510.09980, 2025
-
[8]
Rolling in the deep–hybrid locomotion for wheeled-legged robots using online trajectory optimization,
M. Bjelonic, P. K. Sankar, C. D. Bellicoso, H. Vallery, and M. Hutter, “Rolling in the deep–hybrid locomotion for wheeled-legged robots using online trajectory optimization,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3626–3633, 2020
2020
-
[9]
Dynamic hybrid locomo- tion and jumping for wheeled-legged quadrupeds,
M. Hosseini, D. Rodriguez, and S. Behnke, “Dynamic hybrid locomo- tion and jumping for wheeled-legged quadrupeds,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 793–799
2023
-
[10]
Keep rollin’—whole-body motion control and planning for wheeled quadrupedal robots,
M. Bjelonic, C. D. Bellicoso, Y . de Viragh, D. Sako, F. D. Tresoldi, F. Jenelten, and M. Hutter, “Keep rollin’—whole-body motion control and planning for wheeled quadrupedal robots,”IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 2116–2123, 2019
2019
-
[11]
Balancing control and pose optimization for wheel-legged robots navigating high obstacles,
J. Li, J. Ma, and Q. Nguyen, “Balancing control and pose optimization for wheel-legged robots navigating high obstacles,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 8835–8841
2022
-
[12]
Fast tube model predictive control for driverless cars using linear data-driven models,
B. A. H. Vicente, P. A. Trodden, and S. R. Anderson, “Fast tube model predictive control for driverless cars using linear data-driven models,” IEEE Transactions on Control Systems Technology, vol. 31, no. 3, pp. 1395–1410, 2022
2022
-
[13]
A collision-free mpc for whole-body dynamic locomotion and manipu- lation,
J.-R. Chiu, J.-P. Sleiman, M. Mittal, F. Farshidian, and M. Hutter, “A collision-free mpc for whole-body dynamic locomotion and manipu- lation,” in2022 international conference on robotics and automation (ICRA). IEEE, 2022, pp. 4686–4693
2022
-
[14]
Intent prediction- driven model predictive control for uav planning and navigation in dynamic environments,
Z. Xu, H. Jin, X. Han, H. Shen, and K. Shimada, “Intent prediction- driven model predictive control for uav planning and navigation in dynamic environments,”IEEE Robotics and Automation Letters, 2025
2025
-
[15]
Perceptive locomotion through nonlinear model-predictive control,
R. Grandia, F. Jenelten, S. Yang, F. Farshidian, and M. Hutter, “Perceptive locomotion through nonlinear model-predictive control,” IEEE Transactions on Robotics, vol. 39, no. 5, pp. 3402–3421, 2023
2023
-
[16]
Collision-free mpc for legged robots in static and dynamic scenes,
M. Gaertner, M. Bjelonic, F. Farshidian, and M. Hutter, “Collision-free mpc for legged robots in static and dynamic scenes,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 8266–8272
2021
-
[17]
Rebot: Reflexive evasion robot for instantaneous dynamic obstacle avoidance,
Z. Xu, C. Hao, C. Wang, K. Sima, F. Shi, and J. S. Dong, “Rebot: Reflexive evasion robot for instantaneous dynamic obstacle avoidance,” arXiv preprint arXiv:2508.06229, 2025
-
[18]
Agile but safe: Learning collision-free high-speed legged locomotion,
T. He, C. Zhang, W. Xiao, G. He, C. Liu, and G. Shi, “Agile but safe: Learning collision-free high-speed legged locomotion,”arXiv preprint arXiv:2401.17583, 2024
-
[19]
Learning agile loco- motion on risky terrains,
C. Zhang, N. Rudin, D. Hoeller, and M. Hutter, “Learning agile loco- motion on risky terrains,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 11 864– 11 871
2024
-
[20]
Learning robust perceptive locomotion for quadrupedal robots in the wild,
T. Miki, J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter, “Learning robust perceptive locomotion for quadrupedal robots in the wild,”Science robotics, vol. 7, no. 62, p. eabk2822, 2022
2022
-
[21]
Learning agile and dynamic motor skills for legged robots,
J. Hwangbo, J. Lee, A. Dosovitskiy, D. Bellicoso, V . Tsounis, V . Koltun, and M. Hutter, “Learning agile and dynamic motor skills for legged robots,”Science Robotics, vol. 4, no. 26, p. eaau5872, 2019
2019
-
[22]
Advanced skills by learning locomotion and local navigation end-to-end,
N. Rudin, D. Hoeller, M. Bjelonic, and M. Hutter, “Advanced skills by learning locomotion and local navigation end-to-end,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 2497–2503
2022
-
[23]
Ego-planner: An esdf- free gradient-based local planner for quadrotors,
X. Zhou, Z. Wang, H. Ye, C. Xu, and F. Gao, “Ego-planner: An esdf- free gradient-based local planner for quadrotors,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 478–485, 2020
2020
-
[24]
Reactive base control for on-the-move mobile manipulation in dynamic envi- ronments,
B. Burgess-Limerick, J. Haviland, C. Lehnert, and P. Corke, “Reactive base control for on-the-move mobile manipulation in dynamic envi- ronments,”IEEE Robotics and Automation Letters, vol. 9, no. 3, pp. 2048–2055, 2024
2048
-
[25]
Dynamic obstacle avoidance for car-like mobile robots based on neurodynamic optimization with control barrier functions,
Z. Zhang and G.-H. Yang, “Dynamic obstacle avoidance for car-like mobile robots based on neurodynamic optimization with control barrier functions,”Neurocomputing, p. 131252, 2025
2025
-
[26]
Ackerman unmanned mobile vehicle based on heterogeneous sensor in navigation control application,
C.-H. Shih, C.-J. Lin, and J.-Y . Jhang, “Ackerman unmanned mobile vehicle based on heterogeneous sensor in navigation control application,” Sensors, vol. 23, no. 9, p. 4558, 2023
2023
-
[27]
Anymal parkour: Learning agile navigation for quadrupedal robots,
D. Hoeller, N. Rudin, D. Sako, and M. Hutter, “Anymal parkour: Learning agile navigation for quadrupedal robots,”Science Robotics, vol. 9, no. 88, p. eadi7566, 2024
2024
-
[28]
Dynamic obstacle avoidance with bounded rationality adversarial reinforcement learning,
J.-L. Holgado-Alvarez, A. Reddi, and C. D’Eramo, “Dynamic obstacle avoidance with bounded rationality adversarial reinforcement learning,” arXiv preprint arXiv:2503.11467, 2025
-
[29]
Moe-loco: Mixture of experts for multitask locomotion,
R. Huang, S. Zhu, Y . Du, and H. Zhao, “Moe-loco: Mixture of experts for multitask locomotion,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 14 218– 14 225
2025
-
[30]
Gmt: General motion tracking for humanoid whole-body control,
Z. Chen, M. Ji, X. Cheng, X. Peng, X. B. Peng, and X. Wang, “Gmt: General motion tracking for humanoid whole-body control,”arXiv preprint arXiv:2506.14770, 2025
-
[31]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Prox- imal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review arXiv 2017
-
[32]
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
M. Mittal, P. Roth, J. Tigue, A. Richard, O. Zhang, P. Du, A. Serrano- Munoz, X. Yao, R. Zurbrügg, N. Rudinet al., “Isaac lab: A gpu- accelerated simulation framework for multi-modal robot learning,” arXiv preprint arXiv:2511.04831, 2025
work page internal anchor Pith review arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.