Recognition: unknown
MUSIC: Learning Muscle-Driven Dexterous Hand Control
Pith reviewed 2026-05-08 04:46 UTC · model grok-4.3
The pith
Hierarchical policies distill muscle tracking into latent spaces so hands can play novel piano pieces with accurate key presses.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
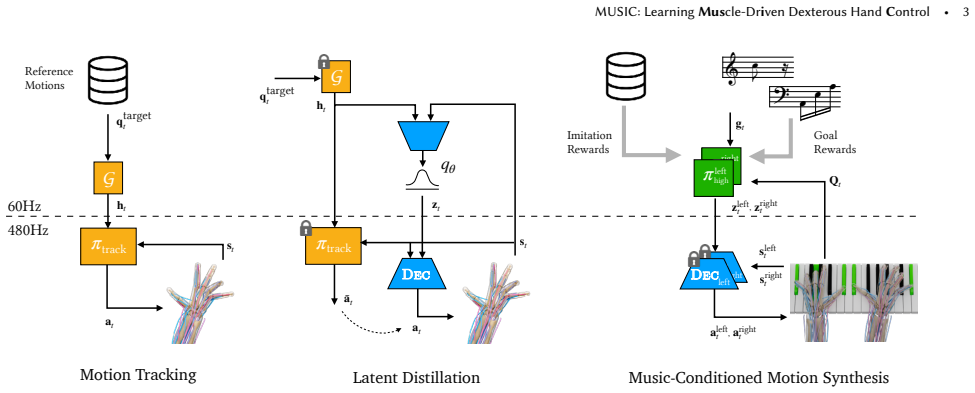
Our approach combines high-frequency muscle-level control with low-frequency latent-space coordination in a hierarchical architecture. At the low level, general single-hand policies are trained via reinforcement learning to generate dynamic muscle-tendon activations while tracking trajectories from a large reference motion dataset. The resulting tracking policies are then distilled into variational autoencoder models, yielding smooth and structured latent spaces that abstract away low-level muscle dynamics. For the high level, we train piece-specific policies to operate in this latent space, coordinating bimanual motions based on specific goals denoted by note events extracted from given mus
What carries the argument
The hierarchical architecture in which reinforcement-learned muscle activation policies are distilled into variational autoencoder latent spaces that high-level policies query to coordinate bimanual actions according to musical note events.
If this is right
- The method produces coordinated bimanual motions with accurate key presses on music outside the reference dataset.
- It reaches state-of-the-art performance for piano playing among physics-based dexterous controllers.
- The enhanced hand model achieves superior biomechanical stability and tracking precision compared with prior models.
- Generated muscle activation patterns align with human electromyography recordings.
Where Pith is reading between the lines
- The same distillation step could support other fine-motor skills such as typing or instrument playing by reusing the latent space across tasks.
- If the latent space proves reusable, it offers a route to controllers that combine precise physics simulation with creative, goal-directed behavior.
- Extending the pipeline to real hardware would require closing the gap between simulated muscle dynamics and actual tendon behavior.
Load-bearing premise
That distilling low-level muscle tracking policies into a VAE latent space preserves enough dynamic information for high-level policies to generalize to novel music pieces without loss of precision or stability.
What would settle it
Measure the fraction of missed or mistimed key presses when the system performs a set of piano pieces never seen in training or in the VAE; if accuracy falls below simpler non-latent baselines or motions become unstable, the generalization claim is falsified.
Figures
















read the original abstract
We present a data-driven approach for physics-based, muscle-driven dexterous control that enables musculoskeletal hands to perform precise piano playing for novel pieces of music outside the reference dataset. Our approach combines high-frequency muscle-level control with low-frequency latent-space coordination in a hierarchical architecture. At the low level, general single-hand policies are trained via reinforcement learning to generate dynamic muscle-tendon activations while tracking trajectories from a large reference motion dataset. The resulting tracking policies are then distilled into variational autoencoder (VAE) models, yielding smooth and structured latent spaces that abstract away low-level muscle dynamics. For the high level, we train piece-specific policies to operate in this latent space, coordinating bimanual motions based on specific goals, denoted by note events extracted from given musical scores, to synthesize performances beyond the reference data. In addition, we present an enhanced musculoskeletal hand model that supports fine control of fingers for accurate low-level motion tracking and diverse high-level motion synthesis. We evaluate the control pipeline of our approach on a diverse piano repertoire spanning multiple musical styles and technical demands. Results demonstrate that our approach can synthesize coordinated bimanual motions with accurate key presses, and achieve the state-of-the-art performance of piano playing in physics-based dexterous control. We also show that our musculoskeletal hand model demonstrates superior biomechanical stability and tracking precision compared to the existing model, and validate that our musculoskeletal hand model and muscle-driven controller can generate physiologically plausible activation patterns that align with human electromyography (EMG) recordings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents MUSIC, a hierarchical data-driven framework for physics-based muscle-driven dexterous hand control to synthesize piano performances on novel music pieces. Low-level RL policies are trained to produce muscle-tendon activations that track trajectories from a reference motion dataset; these policies are distilled into VAE models to produce structured latent spaces. High-level piece-specific policies then operate in the latent space to coordinate bimanual motions from extracted note events in musical scores. An enhanced musculoskeletal hand model is introduced, with evaluations on diverse repertoire claiming SOTA performance in physics-based dexterous control plus physiological plausibility via EMG alignment.
Significance. If the central claims hold with supporting evidence, this would constitute a meaningful advance in physics-based animation and control of high-DoF musculoskeletal systems. The hierarchical RL-plus-VAE approach for generalizing precise dexterous skills beyond reference data, combined with the enhanced hand model and EMG validation, could serve as a template for other complex motor tasks and improve biomechanical fidelity in simulation.
major comments (3)
- [Abstract] Abstract: the claim of 'state-of-the-art performance of piano playing in physics-based dexterous control' and 'accurate key presses' is unsupported by any quantitative metrics, error bars, ablation results, or direct comparisons; this is load-bearing because the central claim cannot be verified without these data.
- [Method (VAE distillation)] VAE distillation step (described in the method): no per-sequence reconstruction errors, ablation of the VAE component, or failure-case analysis on held-out rapid/high-force passages are reported. This directly undermines the weakest assumption that the latent space retains all necessary timing, force, and activation variations for stable generalization to novel music without loss of precision.
- [Evaluation] Evaluation and training details: RL reward weights, hyperparameters, training data exclusion rules, and low-level policy performance metrics are absent. These omissions prevent assessment of whether the low-level tracking policies provide a sufficiently rich basis for the high-level policies to achieve the claimed coordination and accuracy.
minor comments (2)
- [Method] Clarify the exact interaction frequencies between low-level muscle control and high-level latent policies, and how the VAE encoder/decoder is queried during high-level rollouts.
- [Results] Add a table or figure explicitly comparing the enhanced hand model against the prior model on biomechanical stability and tracking precision metrics.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback. The comments identify key areas where additional quantitative support and implementation details will improve the verifiability of our claims. We address each major comment point by point below and will incorporate the requested information in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of 'state-of-the-art performance of piano playing in physics-based dexterous control' and 'accurate key presses' is unsupported by any quantitative metrics, error bars, ablation results, or direct comparisons; this is load-bearing because the central claim cannot be verified without these data.
Authors: We agree that the abstract would be strengthened by explicitly summarizing the quantitative results. The evaluation section reports performance on a diverse piano repertoire with demonstrations of coordinated bimanual motions and accurate key presses. In the revision we will update the abstract to include specific metrics (e.g., key-press success rates on novel pieces, comparison scores against baselines) together with references to the figures and tables that contain error bars and ablation results. revision: yes
-
Referee: [Method (VAE distillation)] VAE distillation step (described in the method): no per-sequence reconstruction errors, ablation of the VAE component, or failure-case analysis on held-out rapid/high-force passages are reported. This directly undermines the weakest assumption that the latent space retains all necessary timing, force, and activation variations for stable generalization to novel music without loss of precision.
Authors: We acknowledge the value of these analyses for validating the VAE distillation. The revised manuscript will add per-sequence reconstruction error statistics for the VAE models, an ablation study that isolates the contribution of the VAE component, and a targeted failure-case examination of held-out rapid and high-force passages to confirm that timing, force, and activation details are preserved in the latent space. revision: yes
-
Referee: [Evaluation] Evaluation and training details: RL reward weights, hyperparameters, training data exclusion rules, and low-level policy performance metrics are absent. These omissions prevent assessment of whether the low-level tracking policies provide a sufficiently rich basis for the high-level policies to achieve the claimed coordination and accuracy.
Authors: We will supply the omitted details in the revised version. The updated manuscript will include the full set of RL reward weights, all training hyperparameters, the criteria used to exclude sequences from the reference motion dataset, and quantitative low-level policy metrics (tracking error, success rate, etc.). These will appear in a dedicated subsection or appendix so that readers can evaluate the foundation provided to the high-level policies. revision: yes
Circularity Check
No significant circularity: hierarchical pipeline is self-contained
full rationale
The paper's chain trains low-level RL policies on reference motion trajectories to produce muscle activations, distills them into a VAE for latent coordination, and trains high-level policies on independent note events extracted from musical scores to handle novel pieces. This structure uses external data sources and standard techniques without any claimed result reducing to its own inputs by definition, without renaming fitted quantities as predictions, and without load-bearing self-citations or imported uniqueness theorems. Evaluation against held-out repertoire, EMG recordings, and biomechanical comparisons supplies independent benchmarks, confirming the derivation remains non-circular.
Axiom & Free-Parameter Ledger
free parameters (2)
- RL reward weights and hyperparameters
- VAE latent dimension and training parameters
axioms (2)
- domain assumption The enhanced musculoskeletal hand model accurately captures human finger biomechanics and stability
- ad hoc to paper Low-level tracking policies can be distilled into a VAE without losing critical control authority for novel tasks
Reference graph
Works this paper leans on
-
[1]
InProceedings of the 33rd ACM International Conference on Multimedia
Separate to Collaborate: Dual-Stream Diffusion Model for Coordinated Piano Hand Motion Synthesis. InProceedings of the 33rd ACM International Conference on Multimedia. 9743–9752. Chaoyi Luo, Pengbin Tang, Yuqi Ma, and Dongjin Huang. 2024b. Learning to Play Guitar with Robotic Hands. InProceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Anim...
2019
-
[2]
Proximal Policy Optimization Algorithms
Biomechanical simulation and control of hands and tendinous systems.ACM Transactions on Graphics (TOG)34, 4 (2015), 1–10. John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. 2017. Proximal policy optimization algorithms.arXiv preprint arXiv:1707.06347(2017). Asad Ali Shahid, Francesco Braghin, and Loris Roveda. 2025. Robot Drumm...
work page internal anchor Pith review arXiv 2015
-
[3]
Shinjiro Sueda, Andrew Kaufman, and Dinesh K Pai
Gray’s anatomy: the anatomical basis of clinical practice.American journal of neuroradiology26, 10 (2005), 2703. Shinjiro Sueda, Andrew Kaufman, and Dinesh K Pai. 2008. Musculotendon simulation for hand animation. InACM SIGGRAPH 2008 papers. 1–8. Chen Tessler, Yunrong Guo, Ofir Nabati, Gal Chechik, and Xue Bin Peng. 2024. Masked- mimic: Unified physics-ba...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.