Recognition: unknown
Phase-Separated Complex Hilbert PCA on Markerless 3D Pose Estimation Data: A Global Phase Network and Its Extension to a Continuous Field on the Body Surface
Pith reviewed 2026-05-07 17:43 UTC · model grok-4.3
The pith
Phase-separated Complex Hilbert PCA extracts a trunk-anchored global phase pattern from markerless 3D pose data in hammer striking.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
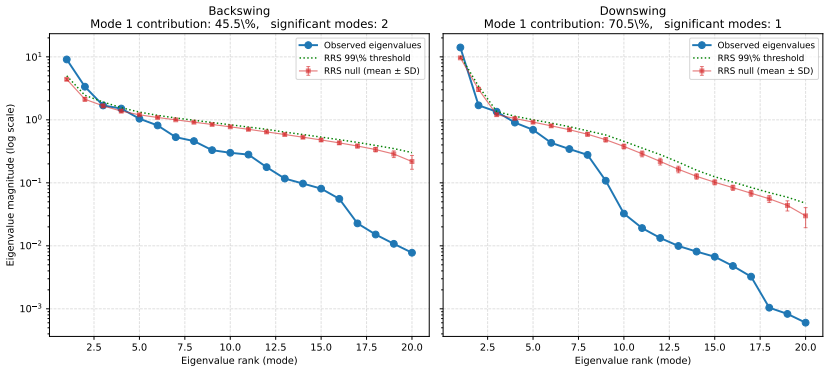
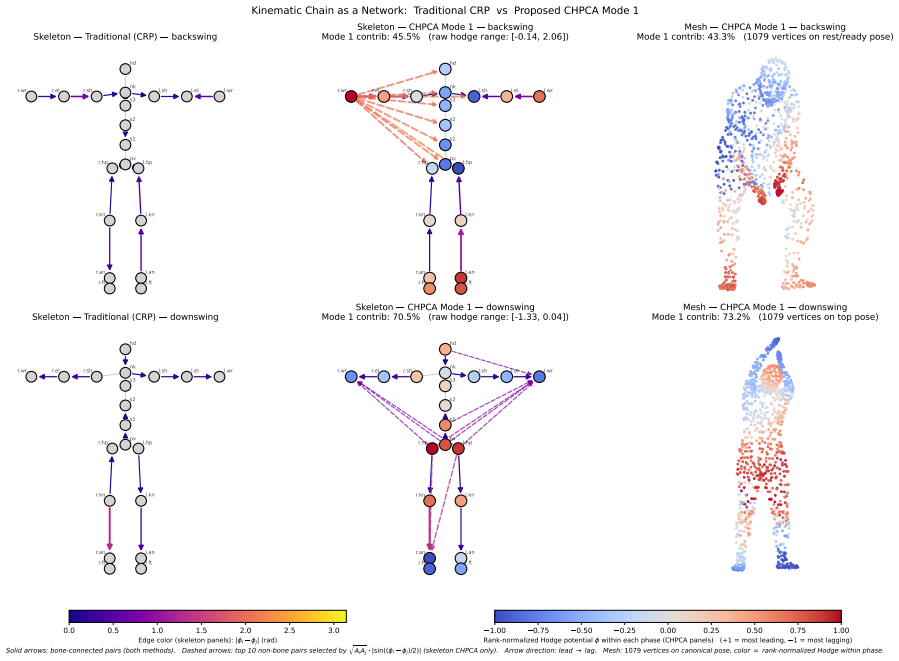
Applying Complex Hilbert Principal Component Analysis separately to backswing and downswing phases on markerless 3D pose estimation data extracts the dominant whole-body phase pattern as a single complex eigenvector. On 14 hammer-striking trials the analysis shows a trunk-anchored global phase architecture, a functional asymmetry quantified by Mode-1 contribution of 45.5 percent in backswing versus 70.5 percent in downswing and inter-trial Spearman consistency of 0.38 versus 0.58, and consistent reorganization across both skeletal joints and mesh vertices at p less than 10 to the minus 10. Pairwise phase differences from the Mode-1 eigenvector correlate with continuous relative phase on all
What carries the argument
Phase-separated Complex Hilbert Principal Component Analysis (CHPCA) that extracts one complex eigenvector per phase to represent the dominant whole-body phase pattern, extended from skeletal joints to a continuous field on 1,079 mesh vertices.
If this is right
- Whole-body coordination can be summarized by a single complex eigenvector per phase instead of separate adjacent-joint calculations.
- Preparation and execution phases exhibit different degrees of mode dominance and trial-to-trial stability.
- The same phase reorganization appears on both joint skeletons and body-surface mesh vertices.
- Mode-1 amplitude correlates with kinetic-energy mobilization variance only during the downswing.
- The pipeline requires no force plates or inertial parameters and runs on outdoor markerless recordings.
Where Pith is reading between the lines
- The trunk-anchored pattern suggests that interventions targeting trunk timing could alter overall coordination more efficiently than distal-joint corrections.
- Extending the continuous mesh field to multiple subjects would allow statistical comparison of phase networks across athletes or skill levels.
- Because the method links phase structure to kinetic variance without direct force measurement, it could serve as a surrogate monitor in field settings.
- Automatic segmentation without strike-count priors opens the possibility of applying the same pipeline to other cyclic or repetitive sports motions.
Load-bearing premise
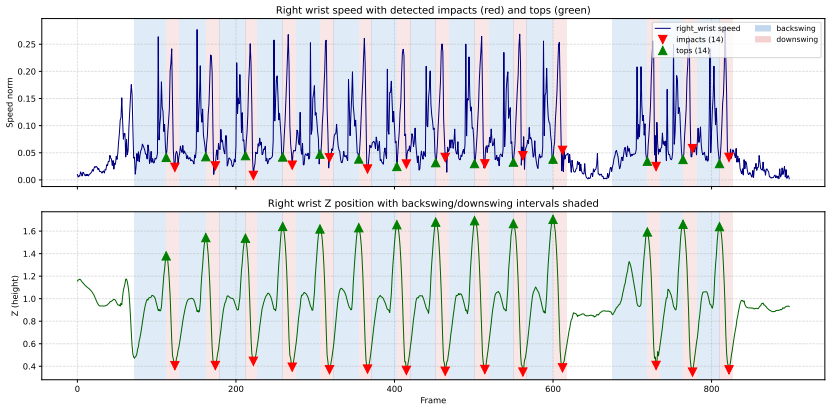
The fully automatic signal-based phase segmentation accurately partitions each trial into backswing and downswing without introducing artifacts from the markerless pose estimator.
What would settle it
Recomputing the Mode-1 eigenvectors and their contribution percentages on the same trials but with manually verified phase boundaries or with data from an independent pose-estimation system would falsify the claim if the reported asymmetry and trunk-anchored pattern disappear.
Figures





read the original abstract
Quantitative analysis of the kinematic chain in sports motion is essential for performance evaluation and injury prevention. Conventional methods such as the kinematic-sequence (KS) and continuous relative phase (CRP) are confined to adjacent joint pairs and lack a unified framework for whole-body coordination, while segmental power-flow analysis requires force plates and inertial parameters that restrict it to laboratory environments. We apply Complex Hilbert Principal Component Analysis (CHPCA) separately to each motion phase (backswing and downswing) on markerless 3D pose estimation data, extracting the dominant whole-body phase pattern as a single complex eigenvector. The pipeline further includes a fully automatic signal-based phase segmentation (no priors on strike count or rest location) and an extension to 1,079 body-surface mesh vertices, so that the kinematic chain is represented as a continuous phase field across the body. On 14 hammer-striking trials of a single subject, the framework reveals (i) a trunk-anchored global phase architecture, (ii) a functional asymmetry between preparation and execution phases quantified by Mode-1 contribution (45.5% vs. 70.5%) and inter-trial Spearman consistency (0.38 vs. 0.58), and (iii) a consistent reorganisation across both skeletal joints and mesh vertices ($p < 10^{-10}$ on 1,079 vertices). As a methodological consistency check, pairwise phase differences from the Mode-1 eigenvector are compared against CRP on all 190 joint pairs by a permutation test ($\rho = 0.473$, $p = 0.0005$). A correspondence analysis between Mode-1 amplitude and kinetic-energy mobilisation variance further shows a strong positive correlation in the downswing ($\rho \approx 0.71$ on both skeleton and mesh) and no correlation in the backswing, indicating that the proposed framework bridges kinematic and kinetic descriptions of coordination through phase structure.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Complex Hilbert Principal Component Analysis (CHPCA) applied separately to automatically segmented backswing and downswing phases of hammer-striking motions from markerless 3D pose estimation data. It extracts a dominant Mode-1 complex eigenvector as a global phase pattern (trunk-anchored), reports functional asymmetry via Mode-1 variance (45.5% backswing vs 70.5% downswing) and inter-trial Spearman consistency (0.38 vs 0.58), demonstrates consistent reorganisation on skeletal joints and 1,079 mesh vertices (p < 10^{-10}), and validates pairwise phase differences against continuous relative phase (CRP) via permutation test (ρ = 0.473, p = 0.0005). It further correlates Mode-1 amplitude with kinetic-energy mobilisation variance (ρ ≈ 0.71 in downswing).
Significance. If the automatic segmentation and pose data prove robust, the framework offers a unified whole-body phase representation that extends beyond pairwise CRP or kinematic-sequence methods, with the mesh extension providing a continuous surface field and the kinetic correlation bridging kinematic-kinetic descriptions. The CRP permutation check is a positive methodological strength for eigenvector fidelity.
major comments (3)
- [Methods] Methods (automatic phase segmentation): The fully automatic signal-based segmentation (no priors on strike count or rest location) is load-bearing for all phase-specific claims, yet the manuscript provides no validation against manual labels, marker-based ground truth, or sensitivity analysis to boundary jitter. The Hilbert transform is known to be sensitive to such boundaries, and markerless estimators can introduce several-cm errors in rapid motions; this directly risks artifacting the reported Mode-1 asymmetry (45.5% vs 70.5%) and consistency values.
- [Results] Results (single-subject design): All central findings—the trunk-anchored architecture, phase asymmetry, p < 10^{-10} reorganisation on 1,079 vertices, and CRP correspondence—are based on 14 trials from one subject. While inter-trial Spearman consistency is quantified, the absence of multi-subject replication or cross-validation leaves open whether these patterns reflect general coordination structure or subject- and estimator-specific features.
- [Data and Methods] Data acquisition and preprocessing: No quantitative metrics are reported for the markerless 3D pose estimator's accuracy during hammer strikes (e.g., joint RMSE or temporal jitter). Because CHPCA eigenvectors and subsequent permutation tests depend on clean phase time series, uncharacterised reconstruction noise could inflate or distort the observed skeleton-to-mesh consistency and the ρ = 0.473 CRP match.
minor comments (2)
- [Abstract] Abstract and Results: The reported percentages (45.5%, 70.5%) and correlations lack error bars or confidence intervals; adding these (or bootstrap estimates) would strengthen interpretability of the asymmetry claims.
- [Results] The kinetic-energy correspondence analysis is mentioned but lacks explicit description of how kinetic energy mobilisation variance was computed from the pose data (e.g., velocity derivatives, mass assumptions); a brief methods paragraph or equation would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which help clarify the scope and limitations of our work. We respond point-by-point to the major comments below, indicating where revisions will be made.
read point-by-point responses
-
Referee: [Methods] Methods (automatic phase segmentation): The fully automatic signal-based segmentation (no priors on strike count or rest location) is load-bearing for all phase-specific claims, yet the manuscript provides no validation against manual labels, marker-based ground truth, or sensitivity analysis to boundary jitter. The Hilbert transform is known to be sensitive to such boundaries, and markerless estimators can introduce several-cm errors in rapid motions; this directly risks artifacting the reported Mode-1 asymmetry (45.5% vs 70.5%) and consistency values.
Authors: We agree that validating the automatic segmentation is important given the sensitivity of the Hilbert transform. Manual labels and marker-based ground truth are not available for this dataset, but we will add a sensitivity analysis in the revised Methods by perturbing segmentation boundaries by small amounts (e.g., shifting by 3-7 frames) and re-running CHPCA to assess stability of the Mode-1 variance (45.5% vs 70.5%) and Spearman consistency values. This will directly test for boundary-induced artifacts. revision: partial
-
Referee: [Results] Results (single-subject design): All central findings—the trunk-anchored architecture, phase asymmetry, p < 10^{-10} reorganisation on 1,079 vertices, and CRP correspondence—are based on 14 trials from one subject. While inter-trial Spearman consistency is quantified, the absence of multi-subject replication or cross-validation leaves open whether these patterns reflect general coordination structure or subject- and estimator-specific features.
Authors: This is a single-subject study designed to characterize intra-individual phase architecture and trial-to-trial consistency in detail, as quantified by the reported Spearman values. We will revise the Discussion to explicitly frame the single-subject design as a limitation and to state that the trunk-anchored pattern and phase asymmetry require multi-subject replication to establish generality. The internal statistical evidence (p < 10^{-10} reorganisation and CRP permutation test) supports reliability within the subject studied. revision: partial
-
Referee: [Data and Methods] Data acquisition and preprocessing: No quantitative metrics are reported for the markerless 3D pose estimator's accuracy during hammer strikes (e.g., joint RMSE or temporal jitter). Because CHPCA eigenvectors and subsequent permutation tests depend on clean phase time series, uncharacterised reconstruction noise could inflate or distort the observed skeleton-to-mesh consistency and the ρ = 0.473 CRP match.
Authors: We will expand the Methods and Discussion sections to include published accuracy benchmarks for the markerless estimator in dynamic upper-body tasks and to acknowledge that hammer-strike-specific RMSE was not quantified here. We note that the observed inter-trial consistency, the highly significant mesh reorganisation, and the CRP correspondence provide indirect support that noise did not dominate the extracted modes, but we will add this as an explicit limitation. revision: yes
Circularity Check
No significant circularity; pipeline applies standard CHPCA to independently segmented phases with external CRP validation
full rationale
The paper's core chain—automatic signal-based phase segmentation (no priors), separate CHPCA per phase to extract Mode-1 complex eigenvectors, statistical reporting of variance contributions and Spearman consistencies, plus permutation test of pairwise phases against CRP—does not reduce any claimed result to its inputs by construction. Mode-1 contribution percentages and inter-trial correlations are direct empirical outputs from the data after segmentation and decomposition; they are not tautological. The CRP permutation test (ρ=0.473) supplies an independent external check rather than a self-referential loop. No self-citations, uniqueness theorems, or ansatzes are invoked as load-bearing justifications for the trunk-anchored architecture or skeleton-to-mesh reorganisation claims. The derivation remains self-contained against the stated benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Complex Hilbert PCA extracts meaningful dominant phase relationships from multivariate kinematic time series
- domain assumption Automatic signal-based segmentation can reliably separate backswing from downswing without external priors
Reference graph
Works this paper leans on
-
[1]
W. Ben Kibler. The role of the scapula in athletic shoulder function.American Journal of Sports Medicine, 26(2):325–337, 1998. doi: 10.1177/03635465980260022801
-
[2]
Shane T. Seroyer, Shane J. Nho, Bernard R. Bach, Charles A. Bush-Joseph, Gregory P. Nicholson, and Anthony A. Romeo. The kinetic chain in overhand pitching: Its potential role in performance enhancement and injury prevention.Sports Health, 2(2):135–146, 2010. doi: 10.1177/1941738110362656
-
[3]
Cheetham, Gregory A
Philip J. Cheetham, Gregory A. Rose, Richard N. Hinrichs, Robert J. Neal, Ralph E. Mot- tram, Paul D. Hurrion, and Peter F. Vint. Comparison of kinematic sequence parameters between amateur and professional golfers. InScience and Golf V: Proceedings of the World Scientific Congress of Golf, 2008
2008
-
[4]
17 Systematic review and meta-analysis on proximal-to-distal sequencing in team handball: Prospects for talent detection?Journal of Human Kinetics, 63:9–21, 2018
Ben Serrien, Ron Clijsen, Jonas Blondeel, Mireille Goossens, and Jean-Pierre Baeyens. 17 Systematic review and meta-analysis on proximal-to-distal sequencing in team handball: Prospects for talent detection?Journal of Human Kinetics, 63:9–21, 2018. PMC 6162978
2018
-
[5]
Richardson
Manuel Varlet and Michael J. Richardson. Computation of continuous relative phase and modulation of frequency of human movement.Journal of Biomechanics, 44(6):1200–1204,
-
[6]
doi: 10.1016/j.jbiomech.2011.02.001
-
[7]
Lamb and Michael St¨ ockl
Peter F. Lamb and Michael St¨ ockl. On the use of continuous relative phase: Review of current approaches and outline for a new standard.Clinical Biomechanics, 29(5):484–493,
-
[8]
doi: 10.1016/j.clinbiomech.2014.03.008
-
[9]
Stock, Laura-Anne M
Holly A. Stock, Laura-Anne M. Furlong, Cassie Wilson, Richard E. A. Van Emmerik, and Ezio Preatoni. New developments in vector coding methods for assessing coordination vari- ability. InProceedings of the 36th Conference of the International Society of Biomechanics in Sports (ISBS), Auckland, New Zealand, 2018
2018
-
[10]
Zehr, Samuel J
Jackie D. Zehr, Samuel J. Howarth, and Tyson A. C. Beach. Using relative phase analyses and vector coding to quantify Pelvis-Thorax coordination during lifting — a methodological investigation.Journal of Electromyography and Kinesiology, 39:104–113, 2018. doi: 10. 1016/j.jelekin.2018.02.004
2018
-
[11]
Gordon E
D. Gordon E. Robertson and David A. Winter. Mechanical energy generation, absorption and transfer amongst segments during walking.Journal of Biomechanics, 13(10):845–854,
-
[12]
doi: 10.1016/0021-9290(80)90172-4
-
[13]
Carol A. Putnam. Sequential motions of body segments in striking and throwing skills: Descriptions and explanations.Journal of Biomechanics, 26(Suppl. 1):125–135, 1993. doi: 10.1016/0021-9290(93)90084-R
-
[14]
Analysis of high-dimensional coordination in human movement using variance spectrum scaling and intrinsic dimension- ality.Entropy, 27(4):447, 2025
Dobromir Dotov, Bin Gu, Anna Hotor, and Stanimira Spyra. Analysis of high-dimensional coordination in human movement using variance spectrum scaling and intrinsic dimension- ality.Entropy, 27(4):447, 2025
2025
-
[15]
Arata Kimura, Toshiharu Yokozawa, and Hiroki Ozaki. Clarifying the biomechanical con- cept of coordination through comparison with coordination in motor control.Frontiers in Sports and Active Living, 3:753062, 2021. doi: 10.3389/fspor.2021.753062
-
[16]
Stephen J. Brown, W. Scott Selbie, and Ewen S. Wallace. Biomechanical analysis of the golf swing: methodological effect of angular velocity component on the identification of the kinematic sequence.Journal of Sports Sciences, 38(2):163–172, 2019. doi: 10.1080/ 02640414.2019.1689076
-
[17]
Glazier and Sina Mehdizadeh
Paul S. Glazier and Sina Mehdizadeh. In search of sports biomechanics’ holy grail: Can athlete-specific optimum sports techniques be identified?Journal of Biomechanics, 94:1–4,
-
[18]
doi: 10.1016/j.jbiomech.2019.07.044
-
[19]
Anne F. M. J. de Swart, Bart van Trigt, Kyle Wasserberger, Marco J. M. Hoozemans, DirkJan H. E. J. Veeger, and Gretchen D. Oliver. Energy flow through the lower extremities in high school baseball pitching.Sports Biomechanics, 24(10):2916–2930, 2022. doi: 10. 1080/14763141.2022.2129430. Published online 2022; final issue 2025
-
[20]
Arnel Aguinaldo and Rafael Escamilla. Segmental power analysis of sequential body motion and elbow valgus loading during baseball pitching: Comparison between profes- sional and high school baseball players.Orthopaedic Journal of Sports Medicine, 7(2): 2325967119827924, 2019. doi: 10.1177/2325967119827924. URLhttps://pmc.ncbi.nlm. nih.gov/articles/PMC6390228/. 18
-
[21]
Nobuyasu Nakano et al. Evaluation of 3D markerless motion capture accuracy using Open- Pose with multiple video cameras.Frontiers in Sports and Active Living, 2:50, 2020. doi: 10.3389/fspor.2020.00050
-
[22]
Kineo: Calibration-free metric motion capture from sparse RGB cameras, 2025
Charles Javerliat, Pierre Raimbaud, and Guillaume Lavou´ e. Kineo: Calibration-free metric motion capture from sparse RGB cameras, 2025. URLhttps://arxiv.org/abs/2510. 24464
2025
-
[23]
Matthew Loper, Naureen Mahmood, Javier Romero, Gerard Pons-Moll, and Michael J. Black. SMPL: A skinned multi-person linear model.ACM Transactions on Graphics, 34 (6), 2015. doi: 10.1145/2816795.2818013
-
[24]
GRF-MV: Ground reaction force estimation from monocular video
Juni Katsu, Esha Dasgupta, and Hyung Jin Chang. GRF-MV: Ground reaction force estimation from monocular video. InBMVC 2024 Workshop ANIMA, 2024
2024
-
[25]
ImDy: Hu- man inverse dynamics from imitated observations
Xinpeng Liu, Junxuan Liang, Zili Lin, Haowen Hou, Yong-Lu Li, and Cewu Lu. ImDy: Hu- man inverse dynamics from imitated observations. InInternational Conference on Learning Representations (ICLR), 2025. URLhttps://arxiv.org/abs/2410.17610
-
[26]
J. D. Peiffer, Kunal Shah, Irina Djuraskovic, Shawana Anarwala, Kayan Abdou, Rujvee Patel, Prakash Jayabalan, Brenton Pennicooke, and R. James Cotton. Portable biome- chanics laboratory: Clinically accessible movement analysis from a handheld smartphone,
- [27]
-
[28]
Daniel Freeman, and Cristian Sminchisescu
Mykhaylo Andriluka, Baruch Tabanpour, C. Daniel Freeman, and Cristian Sminchisescu. LARP: Learned neural physics simulation for articulated 3D human pose reconstruction. InProceedings of the European Conference on Computer Vision (ECCV), 2024. URL https://arxiv.org/abs/2410.12023
-
[29]
R. James Cotton. Differentiable biomechanics unlocks opportunities for markerless motion capture, 2024. URLhttps://arxiv.org/abs/2402.17192
-
[30]
Homogeneous dynamics space for heterogeneous humans
Xinpeng Liu, Junxuan Liang, Chenshuo Zhang, Zixuan Cai, Cewu Lu, and Yong-Lu Li. Homogeneous dynamics space for heterogeneous humans. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025. URLhttps: //arxiv.org/abs/2412.06146
-
[31]
Hiroshi Iyetomi, Hideaki Aoyama, Yoshi Fujiwara, Wataru Souma, Irena Vodenska, and Hiroshi Yoshikawa. Relationship between macroeconomic indicators and economic cycles in U.S.Scientific Reports, 10:8420, 2020. doi: 10.1038/s41598-020-65002-3. URLhttps: //www.nature.com/articles/s41598-020-65002-3
-
[32]
Gerrit Jan van Ingen Schenau. From rotation to translation: Constraints on multi-joint movements and the unique action of bi-articular muscles.Human Movement Science, 8(4): 301–337, 1989. doi: 10.1016/0167-9457(89)90037-7. 19
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.