Recognition: unknown
Learning-Based Dynamics Modeling and Robust Control for Tendon-Driven Continuum Robots
Pith reviewed 2026-05-07 15:50 UTC · model grok-4.3
The pith
A GRU dynamics model optimized end-to-end lets tendon-driven continuum robots track accurately and reject unseen payloads without self-excited oscillations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a GRU-based dynamics model with bidirectional multi-channel connectivity and residual prediction suppresses compounding errors during long-horizon auto-regressive rollout. Treating the trained model as a gradient bridge then permits direct back-propagation to optimize an end-to-end neural policy that implicitly compensates for frictional hysteresis and transmission compliance. On a physical three-section TDCR the resulting controller delivers accurate tracking, maintains performance under previously unseen payloads, and removes the self-excited oscillations that Jacobian methods produce.
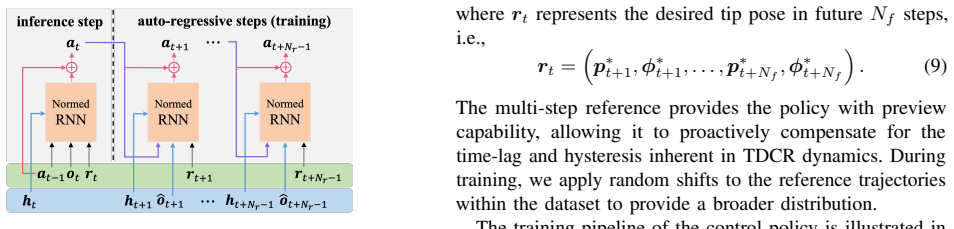
What carries the argument
GRU-based dynamics model with bidirectional multi-channel connectivity and residual prediction, acting as a differentiable gradient bridge for end-to-end neural policy optimization.
If this is right
- Accurate end-effector tracking is maintained on hardware despite frictional and compliant nonlinearities.
- Performance remains stable when the robot carries previously unseen payloads.
- Self-excited oscillations that appear under Jacobian-based controllers are eliminated.
- The policy learns compensation for hysteresis and transmission effects without explicit analytic terms.
Where Pith is reading between the lines
- The same modeling-plus-gradient-bridge pattern could be tried on other soft or cable-driven mechanisms whose physics resist closed-form description.
- Controllers trained this way might transfer more readily from simulation to hardware because the learned dynamics already capture real behavior.
- Replacing analytic Jacobians with learned bridges could shorten the design cycle for new continuum robot prototypes.
- The bidirectional residual structure may prove useful for other long-horizon prediction tasks in robotics where error accumulation is the main obstacle.
Load-bearing premise
The chosen GRU architecture with its bidirectional channels and residual terms actually keeps prediction error from growing over many future steps, which is required for the policy to learn useful compensations.
What would settle it
If the physical three-section robot under the learned controller still shows self-excited oscillations or loses tracking accuracy when an unseen payload is applied, the claim that the framework outperforms Jacobian methods would be refuted.
Figures





read the original abstract
Tendon-Driven Continuum Robots (TDCRs) pose significant modeling and control challenges due to complex nonlinearities, such as frictional hysteresis and transmission compliance. This paper proposes a differentiable learning framework that integrates high-fidelity dynamics modeling with robust neural control. We develop a GRU-based dynamics model featuring bidirectional multi-channel connectivity and residual prediction to effectively suppress compounding errors during long-horizon auto-regressive prediction. By treating this model as a gradient bridge, an end-to-end neural control policy is optimized through backpropagation, allowing it to implicitly internalize compensation for intricate nonlinearities. Experimental validation on a physical three-section TDCR demonstrates that our framework achieves accurate tracking and superior robustness against unseen payloads, outperforming Jacobian-based methods by eliminating self-excited oscillations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a differentiable learning framework for dynamics modeling and control of tendon-driven continuum robots. It introduces a GRU-based dynamics model incorporating bidirectional multi-channel connectivity and residual prediction to reduce compounding errors in long-horizon autoregressive rollouts. This model acts as a gradient bridge for end-to-end optimization of a neural control policy via backpropagation, enabling implicit compensation for nonlinear effects such as frictional hysteresis and transmission compliance. Experimental validation on a physical three-section TDCR is claimed to demonstrate accurate tracking, superior robustness to unseen payloads, and elimination of self-excited oscillations relative to Jacobian-based baselines.
Significance. If the empirical claims are supported by detailed quantitative evidence, the work contributes a practical end-to-end differentiable pipeline for robust control of continuum robots, which are challenging due to their nonlinear dynamics. The physical-robot experiments and direct comparison to standard Jacobian methods constitute a strength, as does the focus on suppressing autoregressive drift through residual and bidirectional modeling choices. This approach could inform similar learning-based control strategies in other soft or continuum robotic systems.
major comments (1)
- [Experimental Validation] The abstract and experimental validation section assert that the framework achieves accurate tracking and superior robustness against unseen payloads while outperforming Jacobian-based methods by eliminating self-excited oscillations, yet supply no quantitative metrics, data collection details, training procedures, error bars, or statistical comparisons; this prevents assessment of the central performance claims.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive assessment of the significance of our work. We address the major comment point-by-point below and will revise the manuscript accordingly to improve clarity and completeness of the experimental validation.
read point-by-point responses
-
Referee: The abstract and experimental validation section assert that the framework achieves accurate tracking and superior robustness against unseen payloads while outperforming Jacobian-based methods by eliminating self-excited oscillations, yet supply no quantitative metrics, data collection details, training procedures, error bars, or statistical comparisons; this prevents assessment of the central performance claims.
Authors: We acknowledge that while the experimental validation section includes figures demonstrating the performance, the text does not sufficiently highlight the quantitative metrics, and details on data collection and training are somewhat brief. We agree this makes it difficult to fully assess the claims. In the revised manuscript, we will expand Section V to include explicit numerical results (e.g., mean and standard deviation of tracking errors for various conditions), detailed data collection protocols (number of trials, sampling rates, payload specifications), training procedures (optimizer, epochs, loss functions), and statistical comparisons. We will also add error bars where missing and include a summary table of key performance metrics. The abstract will remain at a high level as is conventional, but we will ensure the experimental section provides all necessary quantitative evidence. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper's core chain consists of (1) training a GRU dynamics model on data with standard architectural choices (bidirectional multi-channel connectivity + residual prediction) to reduce autoregressive error accumulation, then (2) using the trained model as a differentiable simulator to backpropagate gradients into an end-to-end neural policy. Neither step reduces to its inputs by construction: the dynamics model is fitted to observed trajectories and evaluated on held-out or physical data, while the policy optimization is a standard RL-style gradient descent whose performance is measured by external tracking and robustness metrics on unseen payloads. No self-citation is invoked as a load-bearing uniqueness theorem, no fitted parameter is relabeled as a prediction, and no ansatz is smuggled in. The experimental claims remain falsifiable against Jacobian baselines on the physical hardware.
Axiom & Free-Parameter Ledger
free parameters (2)
- GRU network weights
- Neural control policy weights
axioms (2)
- domain assumption The learned dynamics model is differentiable
- ad hoc to paper Residual prediction and bidirectional connectivity suppress compounding errors in long-horizon rollouts
Reference graph
Works this paper leans on
-
[1]
Continuum robots for medical applications: A survey,
J. Burgner-Kahrs, D. C. Rucker, and H. Choset, “Continuum robots for medical applications: A survey,”IEEE Transactions on Robotics, vol. 31, no. 6, pp. 1261–1280, 2015
2015
-
[2]
Ai co-pilot bronchoscope robot,
J. Zhang, L. Liu, P. Xiang, Q. Fang, X. Nie, H. Ma, J. Hu, R. Xiong, Y . Wang, and H. Lu, “Ai co-pilot bronchoscope robot,”Nature Communications, vol. 15, no. 241, 2024
2024
-
[3]
Design and optimization of a tendon-driven robotic hand,
L. Wen, Y . Li, M. Cong, H. Lang, and Y . Du, “Design and optimization of a tendon-driven robotic hand,” in2017 IEEE International Conference on Industrial Technology (ICIT), 2017, pp. 767–772
2017
-
[4]
Tendon-driven continuum robots with extensible sections—a model-based evaluation of path-following motions,
E. Amanov, T.-D. Nguyen, and J. Burgner-Kahrs, “Tendon-driven continuum robots with extensible sections—a model-based evaluation of path-following motions,”The International Journal of Robotics Research, vol. 40, no. 1, pp. 7–23, 2021
2021
-
[5]
Model-free adaptive control based on prescribed performance and time delay estimation for robotic manipulators subject to backlash hysteresis,
Y . Zhang, L. Fang, T. Song, and M. Zhang, “Model-free adaptive control based on prescribed performance and time delay estimation for robotic manipulators subject to backlash hysteresis,”Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, vol. 237, no. 23, pp. 5674–5691, 2023
2023
-
[6]
Soft material characterization for robotic applications,
J. C. Case, E. L. White, and R. K. Kramer, “Soft material characterization for robotic applications,”Soft Robotics, vol. 2, no. 2, pp. 80–87, 2015
2015
-
[7]
Design and kinematic modeling of constant curvature continuum robots: A review,
R. J. Webster III and B. A. Jones, “Design and kinematic modeling of constant curvature continuum robots: A review,”The International Journal of Robotics Research, vol. 29, no. 13, pp. 1661–1683, 2010
2010
-
[8]
Contact force estimation of continuum robots without embedded sensors: A review,
A. Hu and Y . Sun, “Contact force estimation of continuum robots without embedded sensors: A review,”Advanced Intelligent Systems, p. e202500786, 2025
2025
-
[9]
Data-driven methods for sensing, modeling and control of soft continuum robot: A review,
J. Liu, Y . Duo, X. Chen, Z. Zuo, Y . Liu, and L. Wen, “Data-driven methods for sensing, modeling and control of soft continuum robot: A review,”IEEE/ASME Transactions on Mechatronics, 2025
2025
-
[10]
A reduction of imitation learning and structured prediction to no-regret online learning,
S. Ross, G. Gordon, and D. Bagnell, “A reduction of imitation learning and structured prediction to no-regret online learning,” inProceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics, ser. Proceedings of Machine Learning Research, G. Gordon, D. Dunson, and M. Dud ´ık, Eds., vol. 15. Fort Lauderdale, FL, USA: PML...
2011
-
[11]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,” 2017. [Online]. Available: https://arxiv.org/abs/1707.06347
work page internal anchor Pith review arXiv 2017
-
[12]
Soft actor-critic: Off- policy maximum entropy deep reinforcement learning with a stochastic actor,
T. Haarnoja, A. Zhou, P. Abbeel, and S. Levine, “Soft actor-critic: Off- policy maximum entropy deep reinforcement learning with a stochastic actor,” inProceedings of the 35th International Conference on Machine Learning, ser. Proceedings of Machine Learning Research, J. Dy and A. Krause, Eds., vol. 80. PMLR, 10–15 Jul 2018, pp. 1861–1870
2018
-
[13]
A geometric variable-strain approach for static modeling of soft manipulators with tendon and fluidic actuation,
F. Renda, C. Armanini, V . Lebastard, F. Candelier, and F. Boyer, “A geometric variable-strain approach for static modeling of soft manipulators with tendon and fluidic actuation,”IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 4006–4013, 2020
2020
-
[14]
Dynamics of continuum and soft robots: A strain parameterization based approach,
F. Boyer, V . Lebastard, F. Candelier, and F. Renda, “Dynamics of continuum and soft robots: A strain parameterization based approach,” IEEE Transactions on Robotics, vol. 37, no. 3, pp. 847–863, 2020
2020
-
[15]
Statics and dynamics of continuum robots with general tendon routing and external loading,
D. C. Rucker and R. J. Webster III, “Statics and dynamics of continuum robots with general tendon routing and external loading,”IEEE Transactions on Robotics, vol. 27, no. 6, pp. 1033–1044, 2011
2011
-
[16]
Real-time dynamics of soft and continuum robots based on Cosserat rod models,
J. Till, V . Aloi, and C. Rucker, “Real-time dynamics of soft and continuum robots based on Cosserat rod models,”The International Journal of Robotics Research, vol. 38, no. 6, pp. 723–746, 2019
2019
-
[17]
Learning the forward and inverse kinematics of a 6-dof concentric tube continuum robot in se (3),
R. Grassmann, V . Modes, and J. Burgner-Kahrs, “Learning the forward and inverse kinematics of a 6-dof concentric tube continuum robot in se (3),” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2018, pp. 5125–5132
2018
-
[18]
Learning dynamic models for open loop predictive control of soft robotic manipulators,
T. G. Thuruthel, E. Falotico, F. Renda, and C. Laschi, “Learning dynamic models for open loop predictive control of soft robotic manipulators,”Bioinspiration & biomimetics, vol. 12, no. 6, p. 066003, 2017
2017
-
[19]
Learning-based nonlinear model predictive control of articulated soft robots using recurrent neural networks,
H. Sch ¨afke, T.-L. Habich, C. Muhmann, S. F. G. Ehlers, T. Seel, and M. Schappler, “Learning-based nonlinear model predictive control of articulated soft robots using recurrent neural networks,”IEEE Robotics and Automation Letters, vol. 9, no. 12, pp. 11 609–11 616, 2024
2024
-
[20]
Generalizable and fast surrogates: Model predictive control of articulated soft robots using physics-informed neural networks,
T.-L. Habich, A. Mohammad, S. F. G. Ehlers, M. Bensch, T. Seel, and M. Schappler, “Generalizable and fast surrogates: Model predictive control of articulated soft robots using physics-informed neural networks,”IEEE Transactions on Robotics, vol. 42, pp. 619–636, 2026
2026
-
[21]
A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations,
Z. Tang, L. Tian, W. Xin, Q. Wang, D. Rus, and C. Laschi, “A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations,” Science Advances, vol. 12, no. 2, p. eaea3712, 2026
2026
-
[22]
Control strategies for soft robot systems,
J. Wang and A. Chortos, “Control strategies for soft robot systems,” Advanced Intelligent Systems, vol. 4, no. 5, p. 2100165, 2022
2022
-
[23]
K. M. Lynch and F. C. Park,Modern robotics. Cambridge University Press, 2017
2017
-
[24]
An actuator space optimal kinematic path tracking framework for tendon-driven continuum robots: Theory, algorithm and validation,
K. Qiu, H. Zhang, J. Zhang, R. Xiong, H. Lu, and Y . Wang, “An actuator space optimal kinematic path tracking framework for tendon-driven continuum robots: Theory, algorithm and validation,”The International Journal of Robotics Research, vol. 44, no. 6, pp. 1006–1034, 2025
2025
-
[25]
Mechanics for tendon actuated multisection continuum arms,
P. S. Gonthina, M. B. Wooten, I. S. Godage, and I. D. Walker, “Mechanics for tendon actuated multisection continuum arms,” in2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 3896–3902
2020
-
[26]
Computing jacobians and compliance matrices for externally loaded continuum robots,
D. C. Rucker and R. J. Webster, “Computing jacobians and compliance matrices for externally loaded continuum robots,” in2011 IEEE international conference on robotics and automation. IEEE, 2011, pp. 945–950
2011
-
[27]
Closed-loop control of soft continuum manipulators under tip follower actuation,
F. Campisano, S. Cal ´o, A. A. Remirez, J. H. Chandler, K. L. Obstein, R. J. Webster III, and P. Valdastri, “Closed-loop control of soft continuum manipulators under tip follower actuation,”The International Journal of Robotics Research, vol. 40, no. 6-7, pp. 923–938, 2021
2021
-
[28]
Model-based dynamic feedback control of a planar soft robot: trajectory tracking and interaction with the environment,
C. Della Santina, R. K. Katzschmann, A. Bicchi, and D. Rus, “Model-based dynamic feedback control of a planar soft robot: trajectory tracking and interaction with the environment,”The International Journal of Robotics Research, vol. 39, no. 4, pp. 490–513, 2020
2020
-
[29]
Adaptive dynamic sliding mode control of soft continuum manipulators,
A. Kazemipour, O. Fischer, Y . Toshimitsu, K. W. Wong, and R. K. Katzschmann, “Adaptive dynamic sliding mode control of soft continuum manipulators,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 3259–3265
2022
-
[30]
Autonomous steering of concentric tube robots via nonlinear model predictive control,
M. Khadem, J. O’Neill, Z. Mitros, L. Da Cruz, and C. Bergeles, “Autonomous steering of concentric tube robots via nonlinear model predictive control,”IEEE Transactions on Robotics, vol. 36, no. 5, pp. 1595–1602, 2020
2020
-
[31]
A unified and modular model predictive control framework for soft continuum manipulators under internal and external constraints,
F. A. Spinelli and R. K. Katzschmann, “A unified and modular model predictive control framework for soft continuum manipulators under internal and external constraints,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 9393–9400
2022
-
[32]
Open loop position control of soft continuum arm using deep reinforcement learning,
S. Satheeshbabu, N. K. Uppalapati, G. Chowdhary, and G. Krishnan, “Open loop position control of soft continuum arm using deep reinforcement learning,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 5133–5139
2019
-
[33]
Learning closed loop kinematic controllers for continuum manipulators in unstructured environments,
T. George Thuruthel, E. Falotico, M. Manti, A. Pratesi, M. Cianchetti, and C. Laschi, “Learning closed loop kinematic controllers for continuum manipulators in unstructured environments,”Soft robotics, vol. 4, no. 3, pp. 285–296, 2017
2017
-
[34]
Data-efficient and predefined-time stable control for continuum robots,
P. Yu, Z. Liang, and N. Tan, “Data-efficient and predefined-time stable control for continuum robots,”IEEE Transactions on Robotics, vol. 42, pp. 382–399, 2026
2026
-
[35]
Static shape control of soft continuum robots using deep visual inverse kinematic models,
E. Almanzor, F. Ye, J. Shi, T. G. Thuruthel, H. A. Wurdemann, and F. Iida, “Static shape control of soft continuum robots using deep visual inverse kinematic models,”IEEE Transactions on Robotics, vol. 39, no. 4, pp. 2973–2988, 2023
2023
-
[36]
Learning vision-based agile flight via differentiable physics,
Y . Zhang, Y . Hu, Y . Song, D. Zou, and W. Lin, “Learning vision-based agile flight via differentiable physics,”Nature Machine Intelligence, vol. 7, no. 6, pp. 954–966, 2025
2025
-
[37]
High-precision and high-efficiency trajectory tracking for excavators based on closed-loop dynamics,
Z. Zou, C. Wang, Y . Hu, X. Liu, B. Xu, R. Xiong, C. Fan, Y . Chen, and Y . Wang, “High-precision and high-efficiency trajectory tracking for excavators based on closed-loop dynamics,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, pp. 5617–5624
2025
-
[38]
Efficient Model-Based Reinforcement Learning for Robot Control via Online Optimization
F. Nan, H. Ma, Q. Guan, J. Hughes, M. Muehlebach, and M. Hutter, “Efficient model-based reinforcement learning for robot control via online learning,” 2025. [Online]. Available: https://arxiv.org/abs/2510.18518
work page internal anchor Pith review arXiv 2025
-
[39]
DexNDM: Closing the reality gap for dexterous in-hand rotation via joint-wise neural dynamics model,
X. Liu, H. Wang, and L. Yi, “DexNDM: Closing the reality gap for dexterous in-hand rotation via joint-wise neural dynamics model,” in The fourteenth International Conference on Learning Representations, 2026
2026
-
[40]
J. L. Ba, J. R. Kiros, and G. E. Hinton, “Layer normalization,” 2016. [Online]. Available: https://arxiv.org/abs/1607.06450
work page internal anchor Pith review arXiv 2016
-
[41]
Dropout: A simple way to prevent neural networks from overfitting,
N. Srivastava, G. Hinton, A. Krizhevsky, I. Sutskever, and R. Salakhut- dinov, “Dropout: A simple way to prevent neural networks from overfitting,”Journal of Machine Learning Research, vol. 15, no. 56, pp. 1929–1958, 2014
1929
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.