Recognition: unknown
Scenario-based System Testing for Distributed Robotics Applications
Pith reviewed 2026-05-07 15:54 UTC · model grok-4.3
The pith
SCSL composes elementary scenarios into system tests for distributed robots and executes them online to handle nondeterminism and runtime changes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
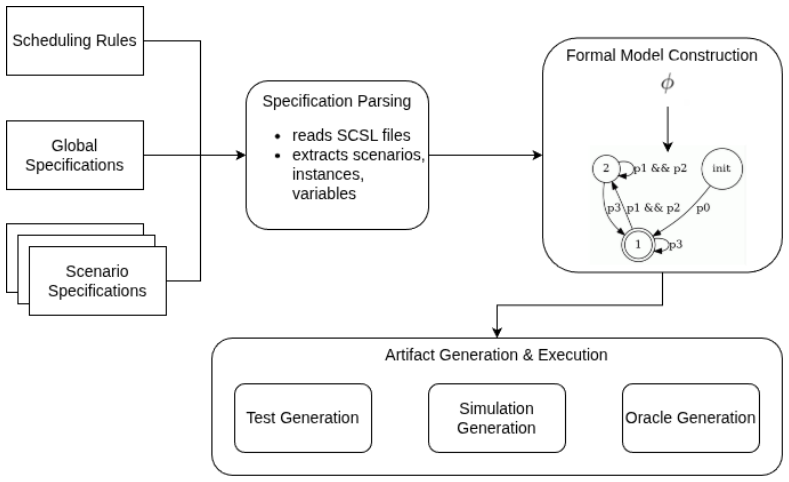
SCSL provides a language for specifying expected behaviors and stimuli in elementary scenarios that compose via sequential and parallel operators into full system tests, paired with an online execution platform that selects steps at runtime and a collaboration construct that supports removing, adding, and rewiring components dynamically during test runs.
What carries the argument
The SCenario Specification Language (SCSL) with its sequential and parallel composition operators plus collaboration construct, which decomposes tests and enables on-the-fly selection and reconfiguration without a single monolithic model.
Load-bearing premise
That breaking tests into elementary scenarios and selecting steps online during execution will cover the necessary behaviors of nondeterministic distributed systems without missing critical failures.
What would settle it
Running the SCSL prototype on a multi-robot salvage mission where a known nondeterministic failure mode occurs only after specific runtime reconfigurations, and checking whether the generated tests detect or exercise that failure.
Figures






read the original abstract
We present the SCenario Specification Language (SCSL) for automated generation and execution of system-level tests. SCSL targets complex distributed systems (e.g., collaborating autonomous robots) where classical model-based testing becomes impractical because (1) the overall system complexity is too high for a single monolithic model, (2) test behaviour cannot be fully precomputed due to substantial nondeterminism in the distributed system under test (SUT), and (3) the SUT configuration may change dynamically at runtime. Challenge (1) is addressed by scenarios: each scenario specifies test-specific expected SUT behaviour and/or stimuli to be applied during execution. Complex system tests are composed from elementary scenarios using sequential and parallel composition. To address (2), the SCSL tool platform supports online (on-the-fly) testing, selecting and executing test steps during runtime. For (3), SCSL provides a collaboration construct that supports dynamic reconfiguration: removing unavailable components, registering newly joining components, and rewiring interfaces during test execution. We illustrate the syntax and semantics of SCSL using a system-test example in which robots perform a salvage mission, and we use an automatically generated test execution to demonstrate the concepts supported by our prototype tool platform.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents the SCenario Specification Language (SCSL) for automated generation and execution of system-level tests targeting complex distributed robotics applications. It composes tests from elementary scenarios via sequential and parallel operators, supports online (on-the-fly) selection and execution to handle nondeterminism, and introduces a collaboration construct for dynamic runtime reconfiguration of components and interfaces. The claims are illustrated via a salvage-mission example with collaborating robots and a prototype tool platform.
Significance. If the runtime selection mechanism can be shown to systematically address nondeterminism, SCSL would offer a practical alternative to monolithic model-based testing for distributed systems whose configuration and behavior cannot be fully precomputed. The scenario-composition approach and collaboration construct directly target real engineering challenges in robotics; the prototype and example provide initial feasibility evidence.
major comments (2)
- [Abstract] Abstract: the central claim that online testing 'selects and executes test steps during runtime' to address nondeterminism without exhaustive precomputation is load-bearing, yet no decision procedure, coverage metric, or argument is supplied showing that critical interleavings arising from parallel composition and dynamic reconfiguration will be reached rather than missed.
- [Salvage mission example] Salvage-mission example: the illustration demonstrates syntax and concepts but supplies no quantitative data (e.g., number of paths explored, failure modes detected, or coverage achieved) that would allow assessment of whether the online mechanism actually mitigates the exponential path space described in the skeptic note.
minor comments (2)
- The abstract refers to 'automatically generated test execution' without clarifying the generation algorithm beyond composition; a dedicated section on the generation and selection engine would improve clarity.
- Notation for the collaboration construct and its reconfiguration operations should be defined more formally (e.g., via small-step semantics or pseudocode) to avoid ambiguity when components join or leave.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive assessment of SCSL's relevance to distributed robotics testing challenges. We respond point-by-point to the major comments below, outlining revisions that will strengthen the presentation of the online selection mechanism and the illustrative example.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that online testing 'selects and executes test steps during runtime' to address nondeterminism without exhaustive precomputation is load-bearing, yet no decision procedure, coverage metric, or argument is supplied showing that critical interleavings arising from parallel composition and dynamic reconfiguration will be reached rather than missed.
Authors: We agree that the abstract's emphasis on online testing is central and that the manuscript does not supply a formal decision procedure or coverage metric. The online mechanism, detailed in the tool platform description, selects steps at runtime by matching observed SUT states against scenario constraints and available collaboration reconfigurations, thereby avoiding exhaustive precomputation of all interleavings. In the revision we will add a subsection that (i) describes the concrete selection heuristics used by the prototype, (ii) explains how parallel operators and the collaboration construct influence which interleavings are exercised, and (iii) supplies an informal argument that runtime observation of nondeterministic outcomes allows the tester to reach critical paths that would be missed by any static precomputed schedule. The abstract will be revised to reflect this clarification rather than overstating guarantees. revision: yes
-
Referee: [Salvage mission example] Salvage-mission example: the illustration demonstrates syntax and concepts but supplies no quantitative data (e.g., number of paths explored, failure modes detected, or coverage achieved) that would allow assessment of whether the online mechanism actually mitigates the exponential path space described in the skeptic note.
Authors: The salvage-mission example is presented to illustrate syntax, composition operators, and the collaboration construct in a realistic setting. We acknowledge that it currently lacks quantitative metrics. In the revised manuscript we will extend the example section with execution statistics obtained from the prototype on the same scenario, including the number of distinct interleavings explored during online execution, the failure modes that were triggered, and a simple coverage count of exercised scenario elements. These data will be accompanied by a brief comparison to the size of the precomputed state space to illustrate the mitigation effect. revision: yes
Circularity Check
No circularity in SCSL language and tool presentation
full rationale
The paper introduces SCSL as a novel scenario specification language whose core constructs (elementary scenarios, sequential/parallel composition, and collaboration for dynamic reconfiguration) are defined directly by syntax and semantics, then illustrated on a robot salvage-mission example. No equations, fitted parameters, predictions of test coverage, or uniqueness theorems are claimed; the online (on-the-fly) selection mechanism is presented as an engineering feature of the tool platform rather than a derived result that reduces to its own inputs. No self-citations are invoked as load-bearing premises for the central claims. The contribution is therefore self-contained as a language definition plus prototype demonstration.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Elementary scenarios can be composed sequentially and in parallel to specify complex system-level test behavior.
- domain assumption Online (on-the-fly) test step selection can adequately exercise nondeterministic distributed systems without exhaustive precomputation.
invented entities (2)
-
SCSL language
no independent evidence
-
collaboration construct
no independent evidence
Reference graph
Works this paper leans on
-
[1]
J.Peleska, J.Brauer, W.Huang, Model-basedtestingforavionicsystems – proven benefits and further challenges, in: T. Margaria, B. Steffen (Eds.), Leveraging Applications of Formal Methods, Verification and Validation. Industrial Practice - 8th International Symposium, ISoLA 2018, Limassol, Cyprus, November 5-9, 2018, Proceedings, Part IV, Vol. 11247 of Lect...
-
[2]
F. Hauer, T. Schmidt, B. Holzmüller, A. Pretschner, Did we test all scenarios for automated and autonomous driving systems?, in: 2019 IEEE Intelligent Transportation Systems Conference, ITSC 2019, Auck- land, New Zealand, October 27-30, 2019, IEEE, 2019, pp. 2950–2955. doi:10.1109/ITSC.2019.8917326. URLhttps://doi.org/10.1109/ITSC.2019.8917326
-
[3]
K. G. Larsen, M. Mikucionis, B. Nielsen, Online testing of real-time systems using uppaal, in: J. Grabowski, B. Nielsen (Eds.), Formal Ap- proaches to Software Testing, Springer Berlin Heidelberg, Berlin, Hei- delberg, 2005, pp. 79–94
2005
-
[4]
S. D. Brookes, A. W. Roscoe, Deadlock analysis in networks of com- municating processes, Distributed Comput. 4 (1991) 209–230.doi: 10.1007/BF01784721. URLhttps://doi.org/10.1007/BF01784721
-
[5]
C. B. Nielsen, P. G. Larsen, J. S. Fitzgerald, J. Woodcock, J. Pe- leska, Systems of systems engineering: Basic concepts, model-based techniques, and research directions, ACM Comput. Surv. 48 (2) (2015) 18:1–18:41.doi:10.1145/2794381. URLhttps://doi.org/10.1145/2794381
-
[6]
J. Peleska, F. Brüning, A. E. Haxthausen, W. Huang, Scenario-based system testing for distributed robotics applications - (invited paper), in: A. Cavalcanti, S. Foster, R. Richardson (Eds.), Towards Au- tonomous Robotic Systems - 26th Annual Conference, TAROS 2025, York, UK, August 20-22, 2025, Proceedings, Vol. 16045 of Lecture Notes in Computer Science,...
-
[7]
A. Cavalcanti, R. M. Hierons, Challenges in testing of cyclic sys- tems, in: Y. Aït-Ameur, F. Khendek, D. Méry (Eds.), 27th Inter- national Conference on Engineering of Complex Computer Systems, ICECCS 2023, Toulouse, France, June 14-16, 2023, IEEE, 2023, pp. 1–6.doi:10.1109/ICECCS59891.2023.00010. URLhttps://doi.org/10.1109/ICECCS59891.2023.00010
-
[8]
M. Hilscher, S. Linker, E. Olderog, A. P. Ravn, An abstract model for proving safety of multi-lane traffic manoeuvres, in: S. Qin, Z. Qiu (Eds.), Formal Methods and Software Engineering - 13th International Conference on Formal Engineering Methods, ICFEM 2011, Durham, UK, October 26-28, 2011. Proceedings, Vol. 6991 of Lecture Notes in Computer Science, Sp...
-
[9]
J. M. Spivey, The Z Notation: A Reference Manual, 2nd Edition, Pren- tice Hall, New York, NY, USA, 1992
1992
-
[10]
C. B. Jones, Systematic Software Development Using VDM, Prentice- Hall, 1986
1986
-
[11]
rep., OMG (2017)
Object Management Group, OMG Unified Modeling Language (OMG UML), superstructure, version 2.5.1, Tech. rep., OMG (2017)
2017
-
[12]
I. E. Sutherland, R. F. Sproull, R. A. Schumacker, A characterization of ten hidden-surface algorithms, ACM Comput. Surv. 6 (1) (1974) 1–55. doi:10.1145/356625.356626. URLhttps://doi.org/10.1145/356625.356626
-
[13]
Mochizuki, M
S. Mochizuki, M. Shimakawa, S. Hagihara, N. Yonezaki, Fast transla- tion from ltl to büchi automata via non-transition-based automata, in: S. Merz, J. Pang (Eds.), Formal Methods and Software Engineering, Springer International Publishing, Cham, 2014, pp. 364–379
2014
-
[14]
K. I. Eder, W. Huang, J. Peleska, Complete agent-driven model-based system testing for autonomous systems, in: M. Farrell, M. Luck- 49 cuck (Eds.), Proceedings Third Workshop on Formal Methods for Au- tonomous Systems, FMAS 2021, Virtual, October 21-22, 2021, EPTCS, 2021, pp. 54–72.doi:10.4204/EPTCS.348.4. URLhttps://doi.org/10.4204/EPTCS.348.4
-
[15]
R. Ganguly, Y. Xue, A. Jonckheere, P. Ljung, B. Schornstein, B. Bonakdarpour, M. Herlihy, Distributed runtime verification of met- ric temporal properties for cross-chain protocols, CoRR abs/2204.09796 (2022).arXiv:2204.09796,doi:10.48550/ARXIV.2204.09796. URLhttps://doi.org/10.48550/arXiv.2204.09796
-
[16]
A behavioural car-following model for computer simulation
P. Gipps, A behavioural car-following model for computer simulation, Transportation Research Part B: Methodological 15 (2) (1981) 105–111. doi:https://doi.org/10.1016/0191-2615(81)90037-0. URLhttps://www.sciencedirect.com/science/article/pii/ 0191261581900370
-
[17]
M. Treiber, A. Hennecke, D. Helbing, Congested traffic states in empir- ical observations and microscopic simulations, Physical Review E 62 (2) (2000) 1805–1824.doi:10.1103/physreve.62.1805. URLhttp://dx.doi.org/10.1103/PhysRevE.62.1805
-
[18]
M. Bando, K. Hasebe, K. Nakanishi, A. Nakayama, Analysis of optimal velocity model with explicit delay, Phys. Rev. E 58 (1998) 5429–5435. doi:10.1103/PhysRevE.58.5429. URLhttps://link.aps.org/doi/10.1103/PhysRevE.58.5429
-
[19]
Defining and substantiating the terms scene, situation, and scenario for automated driving,
S. Ulbrich, T. Menzel, A. Reschka, F. Schuldt, M. Maurer, Defining and substantiating the terms scene, situation, and scenario for automated driving, in: IEEE 18th International Conference on Intelligent Trans- portation Systems, ITSC 2015, Gran Canaria, Spain, September 15-18, 2015, IEEE, 2015, pp. 982–988.doi:10.1109/ITSC.2015.164. URLhttps://doi.org/10...
-
[20]
M. Schwammberger, Introducing liveness into multi-lane spatial logic lane change controllers using UPPAAL, in: M. Gleirscher, S. Kugele, S. Linker (Eds.), Proceedings 2nd International Workshop on Safe Con- trol of Autonomous Vehicles, SCAV@CPSWeek 2018, Porto, Portu- gal, 10th April 2018, Vol. 269 of EPTCS, 2018, pp. 17–31.doi: 50 10.4204/EPTCS.269.3. UR...
-
[21]
W. Damm, E. Möhlmann, T. Peikenkamp, A. Rakow, A formal seman- tics for traffic sequence charts, in: M. Lohstroh, P. Derler, M. Sirjani (Eds.), Principles of Modeling - Essays Dedicated to Edward A. Lee on the Occasion of His 60th Birthday, Vol. 10760 of Lecture Notes in Computer Science, Springer, 2018, pp. 182–205.doi:10.1007/ 978-3-319-95246-8\_11. URL...
-
[22]
R. Stemmer, I. Saxena, L. Panneke, D. Grundt, A. Austel, E. Möhlmann, B. Westphal, Runtime monitoring of complex scenario- based requirements for autonomous driving functions, Science of Com- puter Programming 244 (2025) 103301.doi:10.1016/j.scico.2025. 103301
-
[23]
C. A. Petri, Kommunikation mit Automaten, Dissertation, Schriften des IIM 2, Rheinisch-Westfälisches Institut für Instrumentelle Mathematik an der Universität Bonn, Bonn (1962)
1962
-
[24]
E. Sarmiento, J. C. Leite, E. Almentero, G. Sotomayor Alzamora, Test scenario generation from natural language requirements descriptions based on petri-nets, Electronic Notes in Theoretical Computer Science 329 (2016) 123–148, cLEI 2016 - The Latin American Computing Conference.doi:https://doi.org/10.1016/j.entcs.2016.12.008. URLhttps://www.sciencedirect....
-
[25]
asam.net/standards/ASAM_OpenSCENARIO/ASAM_OpenSCENARIO_XML/ latest/index.html(2024)
ASAM, ASAM OpenSCENARIO,https://publications.pages. asam.net/standards/ASAM_OpenSCENARIO/ASAM_OpenSCENARIO_XML/ latest/index.html(2024)
2024
-
[26]
Finkeldei, C
F. Finkeldei, C. Thees, J.-N. Weghorn, M. Althoff, Scenario fac- tory 2.0: Scenario-based testing of automated vehicles with com- monroad, Automotive Innovation 8 (2025) 207–220.doi:10.1007/ s42154-025-00360-0
2025
-
[27]
S. Yan, X. Zhang, K. Hao, H. Xin, Y. Luo, J. Yang, M. Fan, C. Yang, J. Sun, Z. Yang, On-demand scenario generation for testing automated driving systems, 2025, accepted by FSE 2025.doi:10.1145/3715722. 51
-
[28]
Y. Zhao, J. Zhou, D. Bi, T. Mihalj, J. Hu, A. Eichberger, A survey on the application of large language models in scenario-based testing of automated driving systems, IEEE Transactions on Intelligent Trans- portation Systems (2025).doi:10.48550/arXiv.2505.16587
-
[29]
M. Wild, J. S. Becker, C. Schneiders, E. Möhlmann, A scenario-based simulation framework for testing of highly automated railway systems, in: Proceedings of the 11th International Conference on Vehicle Tech- nology and Intelligent Transport Systems (VEHITS 2025), 2025, pp. 88–99.doi:10.5220/0013286600003941
-
[30]
Harel, H
D. Harel, H. Kugler, A. Pnueli, Synthesis revisited: Generating statechart models from scenario-based requirements, 2005, microsoft Research Technical Report / preprint. URLhttps://www.microsoft.com/en-us/research/wp-content/ uploads/2005/01/he05.pdf
2005
-
[31]
ptvgroup.com/en/products/ptv-vissim(2024)
PTV Group, Multimodal traffic simulation software,https://www. ptvgroup.com/en/products/ptv-vissim(2024)
2024
-
[32]
OMG, OMG systems modeling language v2,https://www.omg.org/ spec/SysML/2.0/Beta2/About-SysML(2024)
2024
-
[33]
Jafer, B
S. Jafer, B. Chhaya, U. Durak, T. Gerlach, Formal scenario definition language for aviation: aircraft landing case study, in: AIAA modeling and simulation technologies conference, 2016, p. 3521
2016
-
[34]
F. Mallet, Clock constraint specification language: specifying clock con- straints with UML/MARTE, Innov. Syst. Softw. Eng. 4 (3) (2008) 309– 314.doi:10.1007/S11334-008-0055-2. URLhttps://doi.org/10.1007/s11334-008-0055-2
-
[35]
Y. Chen, R. Gandhi, Y. Zhang, C. Fan, NL2TL: transforming nat- ural languages to temporal logics using large language models, in: H. Bouamor, J. Pino, K. Bali (Eds.), Proceedings of the 2023 Conference on Empirical Methods in Natural Language Processing, EMNLP 2023, Singapore, December 6-10, 2023, Association for Computational Lin- guistics, 2023, pp. 158...
-
[36]
I. Cohen, D. Peled, End-to-end AI generated runtime verification from natural language specification, in: B. Steffen (Ed.), Bridging the Gap Between AI and Reality - First International Conference, AISoLA 2023, Crete, Greece, October 23-28, 2023, Selected Papers, Vol. 14129 of Lecture Notes in Computer Science, Springer, 2023, pp. 362–384. doi:10.1007/978...
-
[37]
A. Cavalcanti, A. Sampaio, A. Miyazawa, P. Ribeiro, M. Con- serva Filho, A. Didier, W. Li, J. Timmis, Verified simulation for robotics, Science of Computer Programming 174 (2019) 1–37. doi:https://doi.org/10.1016/j.scico.2019.01.004. URLhttps://www.sciencedirect.com/science/article/pii/ S0167642318301655
-
[38]
G. D. Giacomo, M. Y. Vardi, Linear temporal logic and linear dynamic logic on finite traces, in: F. Rossi (Ed.), IJCAI 2013, Proceedings of the 23rd International Joint Conference on Artificial Intelligence, Beijing, China, August 3-9, 2013, IJCAI/AAAI, 2013, pp. 854–860. URLhttp://www.aaai.org/ocs/index.php/IJCAI/IJCAI13/paper/ view/6997
2013
-
[39]
K. R. Apt, F. S. de Boer, E.-R. Olderog, Verification of Sequential and Concurrent Programs, Springer, Berlin Heidelberg New York, 2010. 53 Appendix A. Behavioural Semantics of SCSL System Test Configurations Appendix A.1. Valuation functions The behaviour of system test configurations is formalised by finite se- quencesπ=σ 0.σ1 . . . σq of valuation func...
2010
-
[40]
If, for example, rover numberjis part of the collaboration and active in stepi, thenV i contains symbolscoll.r[i].cmd,coll.r[i].dst,coll.r[i].id, coll.r[i].pos,coll.r[i].id
All parameter symbols of objects that are active in stepi. If, for example, rover numberjis part of the collaboration and active in stepi, thenV i contains symbolscoll.r[i].cmd,coll.r[i].dst,coll.r[i].id, coll.r[i].pos,coll.r[i].id
-
[41]
If scenario instanceReturn(coll.r[j]) is active in stepi, for example,V i containssymbolsReturn(coll.r[j]).activeandReturn(coll.r[j]).aux isLoaded
All auxiliary variable symbols of active instances of elementary scenar- ios, including the implicitly defined auxiliary variables likeactive. If scenario instanceReturn(coll.r[j]) is active in stepi, for example,V i containssymbolsReturn(coll.r[j]).activeandReturn(coll.r[j]).aux isLoaded
-
[42]
The setDis the union of all variable types
The global auxiliary variable symbolEoTindicating the end of the system test. The setDis the union of all variable types. The symbol setsV i change between steps under the following conditions
-
[43]
If an object is deleted from the collaboration in stepi, its parameter symbols are no longer present inVi+1
-
[44]
until the object is removed again from the collaboration
If an object is added to the collaboration in stepi, its parameter sym- bols become elements ofVi+1, Vi+2, . . .until the object is removed again from the collaboration
-
[45]
If an elementary scenario instance is runnable and its precondition is fulfilled in stepi, its auxiliary variables are visible inVi+1
-
[46]
If the execution state of an elementary scenario instance changes from activeto¬activein stepi, then its auxiliary variable symbols are no longer contained inVi+1
-
[47]
runtime error
A schedule is illegal if an active scenario tries to evaluate attributes of a non-existing object (“runtime error”). Active scenarios can always checkobject reference̸=nullto ensure that these runtime errors do not occur. 54 SymbolEoTis contained in all symbol setsV 0, V1, . . . , Vq. For valuations σi, i= 0, . . . ,(q−1), its value isσ i(EoT) =false. Onl...
-
[48]
Every scenario instance transits through execution states passive− →runnable− →active− →passive
-
[49]
State active is characterised for a scenario instanceSbyS.active= true
-
[50]
The auxiliary symbols of a scenario are visible inVi if and only if it is active in observation stepi
-
[51]
Sinceφonly refers to object parameters and never to auxiliary variables, it can be evaluated in any stepiwhere all object parameter symbols occurring inφare contained inV i
A runnable scenario instance becomes active in stepi+ 1, if its pre- conditionφevaluates totruein stepi. Sinceφonly refers to object parameters and never to auxiliary variables, it can be evaluated in any stepiwhere all object parameter symbols occurring inφare contained inV i. If this is not the case because parameters of objects are refer- enced that ar...
-
[52]
In a parallel composition of scenario instancesS1 ∥S 2, bothS 1 andS 2 become immediately runnable. 55
-
[53]
as fast as possible
In a sequential composition of scenario instancesS1;S 2,S 2 remains pas- siveuntiltheS 1 hastraversedexecutionstatespassive− →runnable− → active− →passive, whereafterS 2 becomes runnable. Appendix A.4. The effect of interface definitions Suppose that a collaboration has interface interfaceIfromO 1.atoO 2.b with objectsO 1, O2. An interface transfers the d...
-
[54]
Letc≥1be the maximal cycle time of these objects.21 Then π′, i|=Xφiff∃ℓ∈ {i+ 1,
Letφbe an LTL formula referring to object parameters, parameters of S, and auxiliary variables ofS. Letc≥1be the maximal cycle time of these objects.21 Then π′, i|=Xφiff∃ℓ∈ {i+ 1, . . . ,min(k,2c−1)} π ′, ℓ|=φ. 5.π ′, i|=φ 1Uφ2 iff there existsi≤j≤ksuch thatπ ′, j|=φ 2 and ∀ℓ∈ {i, . . . , k−1} π ′, ℓ|=φ 1
-
[55]
The usual syntactic abbreviationsFφ≡trueUφ,Gφ≡ ¬F¬φ,φ 1 ⇒φ 2 ≡ ¬(φ1 ∧ ¬φ2), andφ 1 ⇔φ 2 ≡(φ 1 ⇒φ 2 ∧φ 2 ⇒φ 1)are defined just as in conventional LTL
A formula holds on the complete sequenceπ′, if it holds at the first indexi= 1, that is,π ′ |=φiffπ ′,1|=φ. The usual syntactic abbreviationsFφ≡trueUφ,Gφ≡ ¬F¬φ,φ 1 ⇒φ 2 ≡ ¬(φ1 ∧ ¬φ2), andφ 1 ⇔φ 2 ≡(φ 1 ⇒φ 2 ∧φ 2 ⇒φ 1)are defined just as in conventional LTL. The modified semantics of the Next-operator is motivated as follows. If the formula application is ...
-
[56]
If the precondition ofSevaluates totruefor the first time inσ i, then the effect of the initial action becomes visible inσi+1
-
[57]
If a condition-action has a guard condition[g]that evaluates totrue inσ j andSis active inσ j andσ j+1, then the effect of the associated action becomes visible inσj+1
-
[58]
If a condition-action has a change conditionwhen(ψ)andψevaluates tofalseinσ j−1 and totrueinσ j, then the effect of the associated action becomes visible inσj+1, provided thatSis active in steps(j− 1), j,(j+ 1)
-
[59]
With this interpretation, auxiliary vari- ables that are not affected by any action in stepjremain unchanged inσ j+1
The action semantics is that of conventional while-languages [39], but with terminating loops only. With this interpretation, auxiliary vari- ables that are not affected by any action in stepjremain unchanged inσ j+1. 58
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.