Recognition: unknown
Split over n resource sharing problem: Are fewer capable agents better than many simpler ones?
Pith reviewed 2026-05-07 13:17 UTC · model grok-4.3
The pith
In coverage tasks where agents share a fixed resource, the initial coverage rate rises with the number of agents, yet overall performance stays flat or favors one agent depending on how speed scales with size.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
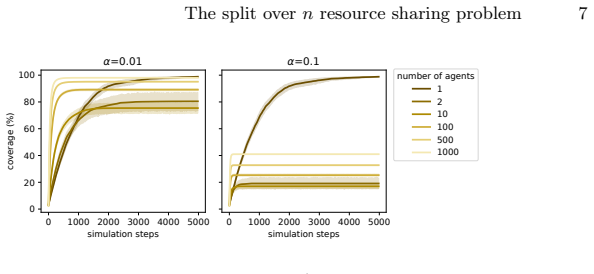
In the split over n resource sharing problem for coverage, where n agents equally divide a common resource and each has a disk footprint whose area scales as 1/n, the initial coverage rate grows with n. If agent speed decreases proportionally with radius, groups of every size perform equally well; if speed instead decreases proportionally with footprint area, a single agent performs best. Simulations show that increasing n also raises individual agent failure rates.
What carries the argument
The split over n resource sharing problem applied to coverage with disk footprints whose area scales exactly as 1/n, together with the two alternative speed-scaling rules (linear in radius or linear in area).
If this is right
- When speed scales with radius, the choice of n has no effect on overall coverage performance.
- When speed scales with footprint area, concentrating all resources in one agent yields the highest coverage.
- Increasing n raises the probability that any given agent fails its task.
Where Pith is reading between the lines
- The same speed-scaling logic could be tested in other tasks such as search or transport where resource limits are shared.
- Designers could choose n by first determining which speed-scaling rule best matches their hardware.
- Failure-rate results suggest adding redundancy or recovery mechanisms when splitting resources widely.
Load-bearing premise
Agent speed decreases proportionally with radius or with footprint area, and the footprint is always a disk whose area is exactly 1/n of the total resource.
What would settle it
Measure coverage performance across different n while holding speed exactly proportional to radius and check whether all group sizes achieve identical overall performance; any systematic difference would falsify the equal-performance claim.
Figures




read the original abstract
In multi-agent systems, should limited resources be concentrated into a few capable agents or distributed among many simpler ones? This work formulates the split over $n$ resource sharing problem where a group of $n$ agents equally shares a common resource (e.g., monetary budget, computational resources, physical size). We present a case study in multi-agent coverage where the area of the disk-shaped footprint of agents scales as $1/n$. A formal analysis reveals that the initial coverage rate grows with $n$. However, if the speed of agents decreases proportionally with their radii, groups of all sizes perform equally well, whereas if it decreases proportionally with their footprints, a single agent performs best. We also present computer simulations in which resource splitting increases the failure rates of individual agents. The models and findings help identify optimal distributiveness levels and inform the design of multi-agent systems under resource constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the 'split over n resource sharing problem' for multi-agent systems, using a coverage case study where n agents equally share a resource, causing their disk-shaped footprints to scale in area as 1/n. A formal analysis shows the initial coverage rate increases with n. Conditional on speed scaling with radius, all group sizes perform equally; with footprint, a single agent is optimal. Simulations demonstrate that greater resource splitting raises individual agent failure rates.
Significance. If the results hold under the stated assumptions, this work offers valuable insights for designing multi-agent systems with constrained resources, helping determine optimal levels of distributiveness. Strengths include the formal analysis of coverage rates and the simulation results on failure rates, which provide concrete, quantitative comparisons across different n. These could inform practical applications in robotics under budget or size limits.
major comments (2)
- The speed scaling assumptions (v decreases proportionally with radii, or with footprints) are introduced conditionally in the formal analysis without derivation from the resource-sharing premise, agent dynamics, or any physical model. This is load-bearing for the headline claims that 'groups of all sizes perform equally well' or 'a single agent performs best,' as the initial coverage-rate growth with n holds only when speed is independent of size.
- The exact disk footprint area scaling as 1/n (and resulting perimeter-driven sqrt(n) coverage growth) is taken as given; the manuscript does not address how deviations in shape, packing efficiency, or non-disk geometries would alter the perimeter term and thus the core scaling result.
minor comments (1)
- The abstract and simulation section could clarify the number of Monte Carlo runs, parameter ranges for speed scaling, and whether the reported failure-rate trends are statistically significant.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope and assumptions of our work. We address each major comment below with clarifications and indicate proposed revisions to the manuscript.
read point-by-point responses
-
Referee: The speed scaling assumptions (v decreases proportionally with radii, or with footprints) are introduced conditionally in the formal analysis without derivation from the resource-sharing premise, agent dynamics, or any physical model. This is load-bearing for the headline claims that 'groups of all sizes perform equally well' or 'a single agent performs best,' as the initial coverage-rate growth with n holds only when speed is independent of size.
Authors: We agree that the speed scalings are conditional assumptions rather than derived from first principles. The resource-sharing premise directly yields the 1/n footprint area scaling, but the translation to velocity depends on the specific actuator or power model (e.g., force proportional to area versus linear dimensions). We selected the radius and footprint scalings as two representative cases common in robotics literature. In revision we will expand the introduction and formal analysis sections with a short paragraph motivating these choices via typical robotic dynamics examples, while reiterating their conditional status. This will not alter the mathematical results but will better contextualize the headline claims. revision: partial
-
Referee: The exact disk footprint area scaling as 1/n (and resulting perimeter-driven sqrt(n) coverage growth) is taken as given; the manuscript does not address how deviations in shape, packing efficiency, or non-disk geometries would alter the perimeter term and thus the core scaling result.
Authors: The circular disk model is chosen to enable an exact closed-form perimeter calculation that produces the sqrt(n) initial coverage growth. We acknowledge that non-circular shapes or packing inefficiencies would modify the effective perimeter-to-area ratio and thus the quantitative scaling. The broader 'split over n' problem formulation itself is geometry-agnostic. We will add a concise limitations paragraph in the discussion section noting that other footprints would require case-specific perimeter analysis, but the qualitative trade-off between coverage rate and failure risk under resource splitting remains applicable. A full generalization to arbitrary shapes lies outside the current scope. revision: partial
Circularity Check
No circularity: results follow from explicit geometric and conditional assumptions
full rationale
The paper states its core claims as consequences of two explicit premises: disk area scales exactly as 1/n (hence radius as 1/sqrt(n)) and speed is either constant, proportional to radius, or proportional to area. The initial-coverage-rate growth with n is obtained by multiplying n agents by their individual coverage contributions (speed times perimeter); the equal-performance and single-agent-best cases are obtained by substituting the two speed scalings. These substitutions are algebraic identities under the stated 'if' conditions, not self-definitions, fitted parameters, or self-citations. No load-bearing uniqueness theorem, ansatz smuggled via citation, or renaming of known results appears. The simulation results on failure rates are independent of the analytic scaling derivations.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Agent footprints are disks whose area scales exactly as 1/n when a fixed resource is shared equally.
- domain assumption Agent speed decreases either proportionally to radius or proportionally to footprint area.
Reference graph
Works this paper leans on
-
[1]
170–181 (01 2020).https://doi.org/10.1007/978-3-030-26945-6_16
Amsters, R., Slaets, P.: Turtlebot 3 as a Robotics Education Platform, pp. 170–181 (01 2020).https://doi.org/10.1007/978-3-030-26945-6_16
-
[2]
Bradski, G.: The opencv library. In: Dr. Dobb’s Journal of Software Tools (2000)
2000
-
[3]
Springer Tracts in Advanced Robotics, vol
Breitenmoser, A., Martinoli, A.: On combining multi-robot coverage and recipro- cal collision avoidance. Springer Tracts in Advanced Robotics, vol. 112, p. 49–64. Springer Japan, Tokyo (2016).https://doi.org/10.1007/978-4-431-55879-8_4, https://infoscience.epfl.ch/handle/20.500.14299/127959
-
[4]
In: Proceedings of The IEEE International Conference on Robotics and Automation (ICRA), Workshop on Mobile Micro-Robots (2000)
Caprari, G., Estier, T., Siegwart, R.: Fascination of down scaling-Alice the sugar cube robot. In: Proceedings of The IEEE International Conference on Robotics and Automation (ICRA), Workshop on Mobile Micro-Robots (2000)
2000
-
[5]
In: 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Chin, K.Y., Khaluf, Y., Pinciroli, C.: Minimalistic collective perception with im- perfect sensors. In: 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 8862–8868. IEEE (2023)
2023
-
[6]
Annals of Mathe- matics and Artificial Intelligence31(1), 113–126 (2001)
Choset, H.: Coverage for robotics – a survey of recent results. Annals of Mathe- matics and Artificial Intelligence31(1), 113–126 (2001)
2001
-
[7]
Dimidov, C., Oriolo, G., Trianni, V.: Random walks in swarm robotics: An experiment with kilobots. pp. 185–196 (09 2016).https://doi.org/10.1007/ 978-3-319-44427-7_16
2016
-
[8]
In: Proceedings of the fourteenth national conference on artificial intelligence and ninth conference on Innovative applications of artificial intelligence
Goldberg, D., Matarić, M.J.: Interference as a tool for designing and evaluating multi-robot controllers. In: Proceedings of the fourteenth national conference on artificial intelligence and ninth conference on Innovative applications of artificial intelligence. pp. 637–642 (1997)
1997
-
[9]
Proceedings of the 9th Conference on Autonomous Robot Systems and Competitions1(01 2009)
Gonçalves, P., Torres, P., Alves, C., Mondada, F., Bonani, M., Raemy, X., Pugh, J., Cianci, C., Klaptocz, A., Magnenat, S., Zufferey, J.C., Floreano, D., Martinoli, A.: The e-puck, a robot designed for education in engineering. Proceedings of the 9th Conference on Autonomous Robot Systems and Competitions1(01 2009)
2009
-
[10]
In: Berekovic, M., Buchty, R., Hamann, H., Koch, D., Pionteck, T
Hamann,H.:Superlinearscalabilityinparallelcomputingandmulti-robotsystems: Shared resources, collaboration, and network topology. In: Berekovic, M., Buchty, R., Hamann, H., Koch, D., Pionteck, T. (eds.) Architecture of Computing Systems – ARCS 2018. pp. 31–42. Springer International Publishing, Cham (2018)
2018
-
[11]
Flow problems in multi- interface networks.IEEE Transactions on Computers, 63:361–374, 2014
Hamann, H., Reina, A.: Scalability in computing and robotics. IEEE Trans- actions on Computers71(6), 1453–1465 (2022).https://doi.org/10.1109/TC. 2021.3089044
work page doi:10.1109/tc 2022
-
[12]
IEEE Trans- actions on Antennas and Propagation65(4), 1642–1650 (2017)
Pfeiffer, C.: Fundamental efficiency limits for small metallic antennas. IEEE Trans- actions on Antennas and Propagation65(4), 1642–1650 (2017)
2017
-
[13]
IEEE Transactions on Robotics 40, 4190–4206 (2024).https://doi.org/10.1109/TRO.2024.3454417
Ramesh, M., Imeson, F., Fidan, B., Smith, S.L.: Anytime replanning of robot cov- erage paths for partially unknown environments. IEEE Transactions on Robotics 40, 4190–4206 (2024).https://doi.org/10.1109/TRO.2024.3454417
-
[14]
In: 2012 IEEE International Conference on Robotics and Au- tomation
Rubenstein,M.,Ahler,C.,Nagpal,R.:Kilobot:Alowcostscalablerobotsystemfor collective behaviors. In: 2012 IEEE International Conference on Robotics and Au- tomation. pp. 3293–3298 (2012).https://doi.org/10.1109/ICRA.2012.6224638
-
[15]
Swarm Intelligence13(1), 1–19 (2019)
Schroeder, A., Trease, B., Arsie, A.: Balancing robot swarm cost and interference effects by varying robot quantity and size. Swarm Intelligence13(1), 1–19 (2019)
2019
-
[16]
In: 2023 International Symposium on Multi-Robot and Multi-Agent Systems (MRS)
Soma, K., Vardharajan, V.S., Hamann, H., Beltrame, G.: Congestion and scalabil- ity in robot swarms: A study on collective decision making. In: 2023 International Symposium on Multi-Robot and Multi-Agent Systems (MRS). pp. 199–206 (2023). https://doi.org/10.1109/MRS60187.2023.10416793 The split overnresource sharing problem 9
-
[17]
Journal of Micromechanics and Microengineering32(10), 103002 (2022)
Yang, C., Van Der Drift, E., French, P.: Review of scaling effects on physical properties and practicalities of cantilever sensors. Journal of Micromechanics and Microengineering32(10), 103002 (2022)
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.