Recognition: unknown
PiGGO: Physics-Guided Learnable Graph Kalman Filters for Virtual Sensing of Nonlinear Dynamic Structures under Uncertainty
Pith reviewed 2026-05-07 11:28 UTC · model grok-4.3
The pith
A physics-guided graph neural ODE inside an extended Kalman filter enables reliable online virtual sensing of nonlinear structures even when the exact dynamics are unknown.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
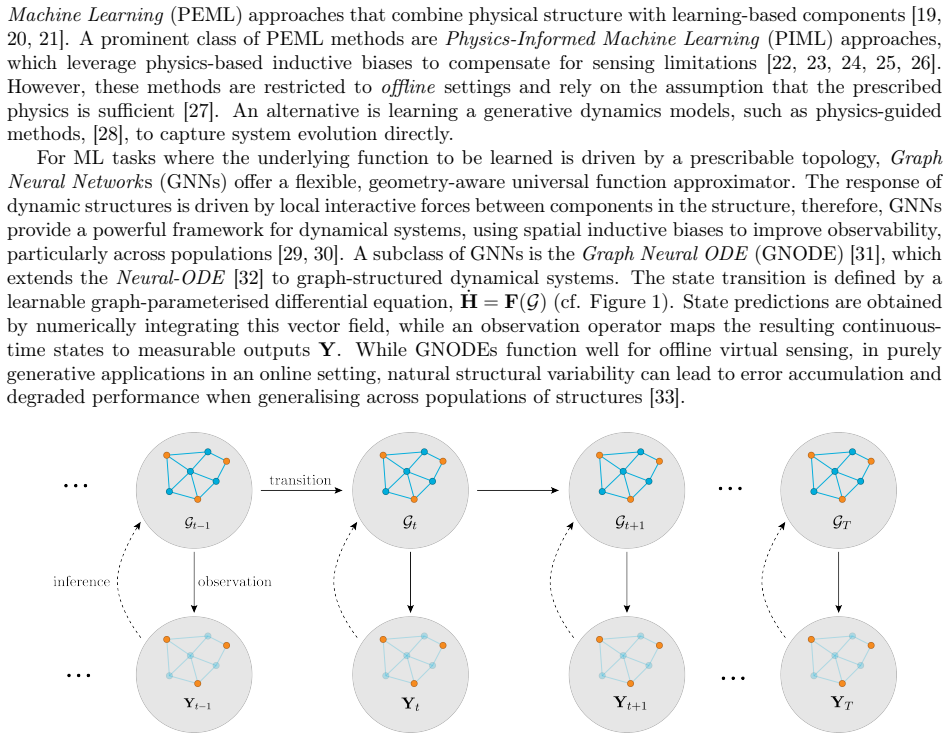
The PiGGO framework places a learned graph neural ordinary differential equation as the continuous-time state-transition model inside an extended Kalman filter; the graph explicitly represents the system state-space while physics-guided inductive biases constrain the learning of nonlinear dynamics, thereby supporting online virtual sensing and uncertainty-aware estimation for nonlinear systems whose model form is unknown and enabling generalization across topologically similar structures.
What carries the argument
The physics-guided graph neural ODE used as the state-transition model inside the extended Kalman filter, with the graph defining connectivity and inductive biases limiting the learned nonlinear dynamics.
Load-bearing premise
The graph representation of the structure together with the chosen physics biases will constrain the learned dynamics enough that the extended Kalman filter produces accurate estimates and generalizes to similar structures even though the true nonlinear equations are unknown.
What would settle it
On a new but topologically similar structure, the filter's predicted states and uncertainty intervals diverge substantially from independent reference measurements collected under nonlinear conditions with unknown model form.
Figures









read the original abstract
Digital twins provide a powerful paradigm for diagnostic and prognostic tasks in the monitoring and control of engineered systems; however, their deployment for complex structures remains challenged by model-form uncertainty, arising from unknown nonlinear dynamics, and by sparse sensing. These limitations hinder reliable online state estimation using either purely physics-based or purely data-driven approaches. This work introduces the Physics-Guided Graph Neural ODE (PiGGO) framework, a physics-informed, graph-based Bayesian state estimation approach in which a learned graph neural ordinary differential equation (GNODE) serves as the continuous-time state-transition model within an extended Kalman filter. The graph representation explicitly defines the system state-space, while physics-guided inductive biases encode known structural relationships and constrain the learning of nonlinear dynamics. By integrating graph-native learned dynamics with recursive Bayesian filtering, the proposed PiGGO framework enables online virtual sensing and uncertainty-aware state estimation for nonlinear systems with unknown model form, while maintaining generalisation across topologically similar structures. Numerical case studies demonstrate improved robustness to model uncertainty and measurement noise, outperforming both open-loop graph neural models and conventional filtering approaches in online prediction tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Physics-Guided Graph Neural ODE (PiGGO) framework, which integrates a learned graph neural ordinary differential equation (GNODE) incorporating physics-guided inductive biases as the continuous-time process model inside an extended Kalman filter (EKF). The graph representation defines the state-space, and the approach aims to enable online virtual sensing, uncertainty-aware state estimation for nonlinear dynamic structures with unknown model form, and generalization across topologically similar structures. Numerical case studies are asserted to show improved robustness to model uncertainty and measurement noise over open-loop graph neural models and conventional filters.
Significance. If the central integration holds and the physics biases sufficiently regularize the GNODE for stable EKF operation, the work could meaningfully advance hybrid physics-data methods for digital twins in structural health monitoring, particularly by addressing model-form uncertainty and enabling recursive Bayesian estimation with generalization. The combination of graph-native dynamics with filtering is a natural extension of existing components and could support practical deployment where purely physics or data-driven methods fall short.
major comments (3)
- [Abstract] Abstract: the claim of 'improved robustness to model uncertainty and measurement noise' and outperformance in numerical case studies is asserted without any quantitative metrics, error bars, ablation results, or description of how noise levels, model mismatch, or training/test splits were controlled; this is load-bearing because the reader's strongest claim and the weakest assumption both hinge on empirical verification of reliable EKF estimates.
- [Framework description (central construction)] Central construction (GNODE inside EKF, as described throughout): the physics-guided inductive biases are stated to constrain the learned vector field so that the first-order Taylor linearization in the EKF remains accurate and covariance propagation yields reliable uncertainty estimates, yet no analysis, Jacobian conditioning checks, or stability verification is provided for the case when the true nonlinear model form is unknown; this directly risks the uncertainty-aware estimation and generalization claims.
- [Numerical case studies] Numerical case studies section: without reported details on how the learned GNODE dynamics were validated to remain close enough to the (unknown) true dynamics for EKF linearization to hold over the operating regime, or on generalization performance across topologically similar but non-identical structures, the outperformance assertions cannot be assessed as load-bearing evidence.
minor comments (2)
- The title refers to 'Learnable Graph Kalman Filters' while the abstract and description emphasize a GNODE process model inside a standard EKF; a brief clarification of any modifications to the Kalman update step would improve precision.
- Notation for the graph topology and physics biases could be introduced earlier with a small diagram or table to aid readers unfamiliar with the specific inductive biases used.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. We address each major comment below, agreeing where revisions are needed to strengthen the empirical support and analysis, and outlining specific changes to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of 'improved robustness to model uncertainty and measurement noise' and outperformance in numerical case studies is asserted without any quantitative metrics, error bars, ablation results, or description of how noise levels, model mismatch, or training/test splits were controlled; this is load-bearing because the reader's strongest claim and the weakest assumption both hinge on empirical verification of reliable EKF estimates.
Authors: We agree that the abstract would be strengthened by including quantitative support. In the revised manuscript, we will update the abstract to report key metrics from the numerical studies, such as mean RMSE values with standard deviations across repeated trials, and briefly note the controlled conditions including noise levels, model mismatch degrees, and train/test splits used in the experiments. revision: yes
-
Referee: [Framework description (central construction)] Central construction (GNODE inside EKF, as described throughout): the physics-guided inductive biases are stated to constrain the learned vector field so that the first-order Taylor linearization in the EKF remains accurate and covariance propagation yields reliable uncertainty estimates, yet no analysis, Jacobian conditioning checks, or stability verification is provided for the case when the true nonlinear model form is unknown; this directly risks the uncertainty-aware estimation and generalization claims.
Authors: The referee correctly notes the absence of explicit verification for the linearization validity. Although the physics-guided biases are intended to promote well-behaved dynamics, the original manuscript lacks Jacobian conditioning or stability analysis under unknown model forms. We will add a dedicated subsection presenting numerical Jacobian norm checks, eigenvalue spectra of the linearized system across operating regimes, and discussion of how the inductive biases support EKF approximation reliability. revision: yes
-
Referee: [Numerical case studies] Numerical case studies section: without reported details on how the learned GNODE dynamics were validated to remain close enough to the (unknown) true dynamics for EKF linearization to hold over the operating regime, or on generalization performance across topologically similar but non-identical structures, the outperformance assertions cannot be assessed as load-bearing evidence.
Authors: We acknowledge that additional validation details are required. The revised numerical case studies section will include: quantitative trajectory prediction errors of the learned GNODE versus true dynamics on validation data; ablation results isolating the effect of physics biases; and explicit generalization metrics across topologically similar but non-identical structures, with full descriptions of noise levels, model mismatch, and train/test protocols to substantiate the outperformance claims. revision: yes
Circularity Check
No significant circularity detected
full rationale
The PiGGO framework is presented as a novel integration of pre-existing components—graph neural ODEs for continuous-time dynamics, physics-guided inductive biases, and the extended Kalman filter for recursive Bayesian estimation—without any derivation step that reduces a claimed prediction or result to a fitted parameter or self-citation by construction. The abstract and described architecture treat the GNODE as the process model inside the EKF, with generalization claims supported by numerical case studies rather than tautological re-derivation. No load-bearing self-citations, self-definitional loops, or renamed known results appear in the provided text; the central claim remains an engineering synthesis whose validity is left to empirical verification.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Michael, J
J. Michael, J. Blankenbach, J. Derksen, B. Finklenburg, R. Fuentes, T. Gries, S. Hendiani, S. Herlé, S. Hesseler, M. Kimm, et al., Integrating models of civil structures in digital twins: State-of-the-art and challenges, Journal of Infrastructure Intelligence and Resilience 3 (3) (2024) 100100
2024
-
[2]
Torzoni, M
M. Torzoni, M. Tezzele, S. Mariani, A. Manzoni, K. E. Willcox, A digital twin framework for civil engineering structures, Computer Methods in Applied Mechanics and Engineering 418 (2024) 116584
2024
-
[3]
C. Ye, L. Butler, C. Bartek, M. Iangurazov, Q. Lu, A. Gregory, M. Girolami, C. Middleton, A digital twin of bridges for structural health monitoring, in: 12th International Workshop on Structural Health Monitoring 2019, Stanford University, 2019
2019
-
[4]
X. Lai, L. Yang, X. He, Y. Pang, X. Song, W. Sun, Digital twin-based structural health monitoring by combining measurement and computational data: An aircraft wing example, Journal of Manufacturing Systems 69 (2023) 76–90
2023
-
[5]
Hielscher, S
T. Hielscher, S. Khalil, N. Virgona, S. Hadigheh, A neural network based digital twin model for the structural health monitoring of reinforced concrete bridges, in: Structures, Vol. 57, Elsevier, 2023, p. 105248. 22
2023
-
[6]
Vettori, E
S. Vettori, E. Di Lorenzo, B. Peeters, M. Luczak, E. Chatzi, An adaptive-noise augmented kalman filter approach for input-state estimation in structural dynamics, Mechanical Systems and Signal Processing 184 (2023) 109654
2023
-
[7]
Vettori, E
S. Vettori, E. Di Lorenzo, B. Peeters, E. Chatzi, A virtual sensing approach to operational modal analysis of wind turbine blades, in: Proceedings of ISMA2020 International Conference on Noise and Vibration Engineering, Leuven, Belgium, 2020
2020
-
[8]
Kamariotis, E
A. Kamariotis, E. Chatzi, Bayesian decision-theoretic model selection for monitored systems, in: IMAC, A Conference and Exposition on Structural Dynamics, Springer, 2024, pp. 115–121
2024
-
[9]
M. G. Kapteyn, J. V. Pretorius, K. E. Willcox, A probabilistic graphical model foundation for enabling predictive digital twins at scale, Nature Computational Science 1 (5) (2021) 337–347
2021
-
[10]
Worden, E
K. Worden, E. Cross, R. Barthorpe, D. Wagg, P. Gardner, On digital twins, mirrors, and virtualizations: Frameworks for model verification and validation, ASCE-ASME J Risk and Uncert in Engrg Sys Part B Mech Engrg 6 (3) (2020)
2020
-
[11]
Simoen, G
E. Simoen, G. De Roeck, G. Lombaert, Dealing with uncertainty in model updating for damage assess- ment: A review, Mechanical Systems and Signal Processing 56 (2015) 123–149
2015
-
[12]
J. Ríos, G. Staudter, M. Weber, R. Anderl, A. Bernard, Uncertainty of data and the digital twin: a review, International Journal of Product Lifecycle Management 12 (4) (2020) 329–358
2020
-
[13]
G. Shi, Z. Liu, D. Lu, Z. Wang, Z. Jiao, C. Ji, Z. Zhang, Construction error control method of large-span spatial structures based on digital twin, Journal of Building Engineering 98 (2024) 111311
2024
-
[14]
Worden, C
K. Worden, C. R. Farrar, G. Manson, G. Park, The fundamental axioms of structural health monitoring, Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 463 (2082) (2007) 1639–1664
2082
-
[15]
C. R. Farrar, K. Worden, Structural health monitoring: a machine learning perspective, John Wiley & Sons, 2012
2012
-
[16]
Legault, R
J. Legault, R. Langley, J. Woodhouse, Physical consequences of a nonparametric uncertainty model in structural dynamics, Journal of sound and vibration 331 (2012) 5469–5487
2012
-
[17]
R. J. Barthorpe, On model-and data-based approaches to structural health monitoring, Ph.D. thesis, University of Sheffield (2010)
2010
-
[18]
Ghadami, B
A. Ghadami, B. I. Epureanu, Data-driven prediction in dynamical systems: recent developments, Philo- sophical Transactions of the Royal Society A 380 (2229) (2022) 20210213
2022
-
[19]
Cicirello, Physics-enhanced machine learning: a position paper for dynamical systems investigations, in: Journal of Physics: Conference Series, Vol
A. Cicirello, Physics-enhanced machine learning: a position paper for dynamical systems investigations, in: Journal of Physics: Conference Series, Vol. 2909, IOP Publishing, 2024, p. 012034
2024
-
[20]
E. J. Cross, S. J. Gibson, M. R. Jones, D. J. Pitchforth, S. Zhang, T. J. Rogers, Physics-informed machine learning for structural health monitoring, in: Structural health monitoring based on data science techniques, Springer, 2021, pp. 347–367
2021
-
[21]
Haywood-Alexander, W
M. Haywood-Alexander, W. Liu, K. Bacsa, Z. Lai, E. Chatzi, Discussing the spectrum of physics- enhanced machine learning: a survey on structural mechanics applications, Data-Centric Engineering 5 (2024) e30
2024
-
[22]
L. Sun, H. Sun, W. Zhang, Y. Li, Hybrid monitoring methodology: A model-data integrated digital twin framework for structural health monitoring and full-field virtual sensing, Advanced Engineering Informatics 60 (2024) 102386
2024
-
[23]
S. A. Zargar, F.-G. Yuan, Physics-informed deep learning for scattered full wavefield reconstruction from a sparse set of sensor data for impact diagnosis in structural health monitoring, Structural Health Monitoring 23 (5) (2024) 2963–2979. 23
2024
-
[24]
Zhang, T
M. Zhang, T. Guo, G. Zhang, Z. Liu, W. Xu, Physics-informed deep learning for structural vibration identification and its application on a benchmark structure, Philosophical Transactions of the Royal Society A 382 (2264) (2024) 20220400
2024
-
[25]
Haywood-Alexander, G
M. Haywood-Alexander, G. Arcieri, A. Kamariotis, E. Chatzi, Response estimation and system identifi- cation of dynamical systems via physics-informed neural networks, Advanced Modeling and Simulation in Engineering Sciences 12 (1) (2025) 8
2025
-
[26]
Zhang, G
R. Zhang, G. P. Warn, A. Radlińska, Dual state-parameter estimation of continuous structural systems with physics-informed parallel neural networks, Journal of Sound and Vibration 571 (2024) 118138
2024
-
[27]
Gupta, F
V. Gupta, F. Marsili, S. Kessler, M. Maleshkova, Physics-informed neural networks used for structural health monitoring in civil infrastructures: State of art and current challenges (2025)
2025
-
[28]
W. Liu, Z. Lai, K. Bacsa, E. Chatzi, Physics-guided deep markov models for learning nonlinear dynam- ical systems with uncertainty, Mechanical Systems and Signal Processing 178 (2022) 109276
2022
-
[29]
Tsialiamanis, C
G. Tsialiamanis, C. Mylonas, E. Chatzi, N. Dervilis, D. J. Wagg, K. Worden, Foundations of population- based shm, part iv: The geometry of spaces of structures and their feature spaces, Mechanical Systems and Signal Processing 157 (2021) 107692
2021
-
[30]
X. Jian, Y. Xia, G. Duthé, K. Bacsa, W. Liu, E. Chatzi, Using graph neural networks and frequency domain data for automated operational modal analysis of populations of structures, Data-Centric En- gineering 6 (2025) e45
2025
- [31]
-
[32]
R. T. Chen, Y. Rubanova, J. Bettencourt, D. K. Duvenaud, Neural ordinary differential equations, Advances in neural information processing systems 31 (2018)
2018
-
[33]
Tsialiamanis, N
G. Tsialiamanis, N. Dervilis, D. J. Wagg, K. Worden, Towards a population-informed approach to the definition of data-driven models for structural dynamics, Mechanical Systems and Signal Processing 200 (2023) 110581
2023
- [34]
-
[35]
S. E. Azam, E. Chatzi, C. Papadimitriou, A dual kalman filter approach for state estimation via output- only acceleration measurements, Mechanical systems and signal processing 60 (2015) 866–886
2015
-
[36]
C. K. Chui, G. Chen, Kalman filtering: with real-time applications, Springer, 2009
2009
-
[37]
Simon, Optimal state estimation: Kalman, H infinity, and nonlinear approaches, John Wiley & Sons, 2006
D. Simon, Optimal state estimation: Kalman, H infinity, and nonlinear approaches, John Wiley & Sons, 2006
2006
-
[38]
Pyrhönen, S
L. Pyrhönen, S. Jaiswal, A. Garcia-Agundez, D. García Vallejo, A. Mikkola, Linearization-based state- transition model for the discrete extended kalman filter applied to multibody simulations, Multibody System Dynamics 57 (1) (2023) 55–72
2023
-
[39]
D. Li, Y. Wang, Parameter identification of a differentiable bouc-wen model using constrained extended kalman filter, Structural Health Monitoring 20 (1) (2021) 360–378
2021
-
[40]
W. Liu, Z. Lai, K. Bacsa, E. Chatzi, Neural extended kalman filters for learning and predicting dynamics of structural systems, Structural Health Monitoring 23 (2) (2024) 1037–1052
2024
-
[41]
Revach, N
G. Revach, N. Shlezinger, X. Ni, A. L. Escoriza, R. J. Van Sloun, Y. C. Eldar, Kalmannet: Neural network aided kalman filtering for partially known dynamics, IEEE Transactions on Signal Processing 70 (2022) 1532–1547. 24
2022
-
[42]
J. Xia, D. Li, H. Gu, T. Lu, P. Zhang, L. Shang, N. Gu, Neural kalman filtering for robust temporal recommendation, in: Proceedings of the 17th ACM International Conference on Web Search and Data Mining, 2024, pp. 836–845
2024
-
[43]
W. Li, X. Fu, B. Zhang, Y. Liu, Unscented kalman filter of graph signals, Automatica 148 (2023) 110796
2023
-
[44]
G. Sagi, N. Shlezinger, T. Routtenberg, Extended kalman filter for graph signals in nonlinear dynamic systems, in: ICASSP 2023-2023 IEEE International Conference on Acoustics, Speech and Signal Pro- cessing (ICASSP), IEEE, 2023, pp. 1–5
2023
-
[45]
M. Sabbaqi, R. Taormina, E. Isufi, Gknet: Graph kalman filtering and model inference via model-based deep learning (2025).arXiv:2506.22004. URLhttps://arxiv.org/abs/2506.22004
- [46]
-
[47]
Sun, Y.-C
Y. Sun, Y.-C. Lu, K. Fu, F. Chen, C.-T. Lu, Detecting anomalous traffic behaviors with seasonal deep kalman filter graph convolutional neural networks, Journal of King Saud University-Computer and Information Sciences 34 (8) (2022) 4729–4742
2022
-
[48]
Buchnik, G
I. Buchnik, G. Sagi, N. Leinwand, Y. Loya, N. Shlezinger, T. Routtenberg, Gsp-kalmannet: Tracking graph signals via neural-aided kalman filtering, IEEE Transactions on Signal Processing (2024)
2024
-
[49]
Gilmer, S
J. Gilmer, S. S. Schoenholz, P. F. Riley, O. Vinyals, G. E. Dahl, Neural message passing for quantum chemistry, in: International conference on machine learning, Pmlr, 2017, pp. 1263–1272
2017
-
[50]
M. Fey, J. E. Lenssen, Fast graph representation learning with pytorch geometric, arXiv preprint arXiv:1903.02428 (2019)
work page internal anchor Pith review arXiv 1903
-
[51]
M. Y. Wang, Deep graph library: Towards efficient and scalable deep learning on graphs, in: ICLR workshop on representation learning on graphs and manifolds, 2019
2019
-
[52]
Grattarola, C
D. Grattarola, C. Alippi, Graph neural networks in tensorflow and keras with spektral [application notes], IEEE Computational Intelligence Magazine 16 (1) (2021) 99–106
2021
-
[53]
Sanchez-Gonzalez, J
A. Sanchez-Gonzalez, J. Godwin, T. Pfaff, R. Ying, J. Leskovec, P. Battaglia, Learning to simulate complex physics with graph networks, in: International conference on machine learning, PMLR, 2020, pp. 8459–8468
2020
-
[54]
de N Santos, G
F. de N Santos, G. Duthé, I. Abdallah, P.-É. Réthoré, W. Weijtjens, E. Chatzi, C. Devriendt, Multi- variate prediction on wake-affected wind turbines using graph neural networks, in: Journal of Physics: Conference Series, Vol. 2647, IOP Publishing, 2024, p. 112006
2024
- [55]
-
[56]
P. W. Battaglia, J. B. Hamrick, V. Bapst, A. Sanchez-Gonzalez, V. Zambaldi, M. Malinowski, A. Tac- chetti, D. Raposo, A. Santoro, R. Faulkner, et al., Relational inductive biases, deep learning, and graph networks, arXiv preprint arXiv:1806.01261 (2018)
work page internal anchor Pith review arXiv 2018
-
[57]
Pfaff, M
T. Pfaff, M. Fortunato, A. Sanchez-Gonzalez, P. Battaglia, Learning mesh-based simulation with graph networks, in: International conference on learning representations, 2020
2020
-
[58]
P. Veličković, G. Cucurull, A. Casanova, A. Romero, P. Lio, Y. Bengio, Graph attention networks, arXiv preprint arXiv:1710.10903 (2017)
work page internal anchor Pith review arXiv 2017
-
[59]
K. Xu, W. Hu, J. Leskovec, S. Jegelka, How powerful are graph neural networks?, arXiv preprint arXiv:1810.00826 (2018)
work page internal anchor Pith review arXiv 2018
-
[60]
Zhang, H
S. Zhang, H. Tong, J. Xu, R. Maciejewski, Graph convolutional networks: a comprehensive review, Computational Social Networks 6 (1) (2019) 1–23. 25
2019
- [61]
-
[62]
Q.-H. Ngo, B. L. Nguyen, T. V. Vu, J. Zhang, T. Ngo, Physics-informed graphical neural network for power system state estimation, Applied Energy 358 (2024) 122602
2024
-
[63]
S. Bishnoi, R. Bhattoo, S. Ranu, N. Krishnan, Enhancing the inductive biases of graph neural ode for modeling dynamical systems, arXiv preprint arXiv:2209.10740 (2022)
-
[64]
A.Thangamuthu, G.Kumar, S.Bishnoi, R.Bhattoo, N.Krishnan, S.Ranu, Unravellingtheperformance of physics-informed graph neural networks for dynamical systems, Advances in Neural Information Processing Systems 35 (2022) 3691–3702
2022
-
[65]
Andreas Bender, Nadine Schneider, Marwin Segler, W
S. Batzner, A. Musaelian, L. Sun, M. Geiger, J. P. Mailoa, M. Kornbluth, N. Molinari, T. E. Smidt, B. Kozinsky, E(3)-equivariant graph neural networks for data-efficient and accurate interatomic poten- tials, Nature Communications 13 (1) (May 2022).doi:10.1038/s41467-022-29939-5. URLhttp://dx.doi.org/10.1038/s41467-022-29939-5
- [66]
-
[67]
V. Sharma, R. T. Oddon, P. Tesini, J. Ravesloot, C. Taal, O. Fink, Equi-euler graphnet: An equivariant, temporal-dynamics informed graph neural network for dual force and trajectory prediction in multi- body systems, Mechanical Systems and Signal Processing 241 (2025) 113533.doi:https://doi.org/ 10.1016/j.ymssp.2025.113533. URLhttps://www.sciencedirect.co...
-
[68]
Y. Kim, H. Bang, Introduction to kalman filter and its applications, in: Introduction and implementa- tions of the Kalman filter, IntechOpen, 2018. 26
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.