A MEC-Based Optimization Framework for Dynamic Inductive Charging
Pith reviewed 2026-05-07 06:07 UTC · model grok-4.3
The pith
A model predictive control framework for dynamic inductive charging improves power utilization and fairness by prioritizing low-battery vehicles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
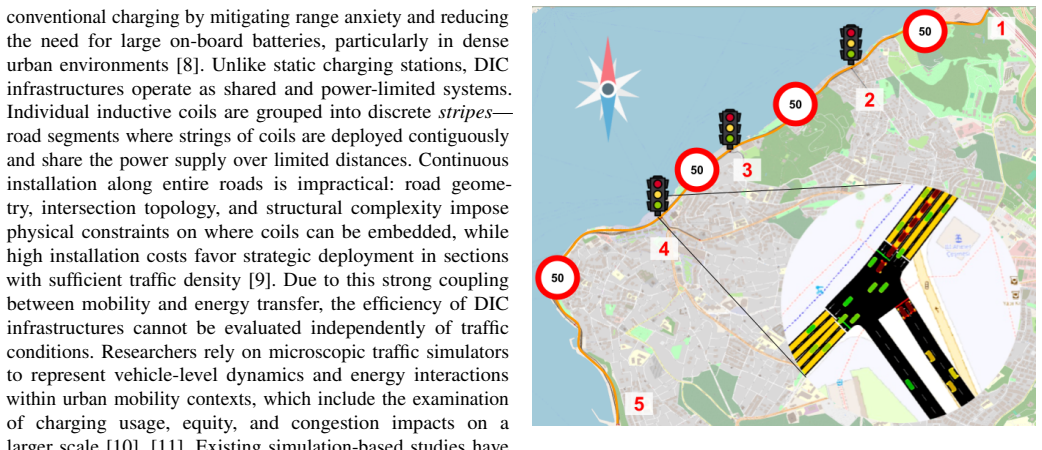
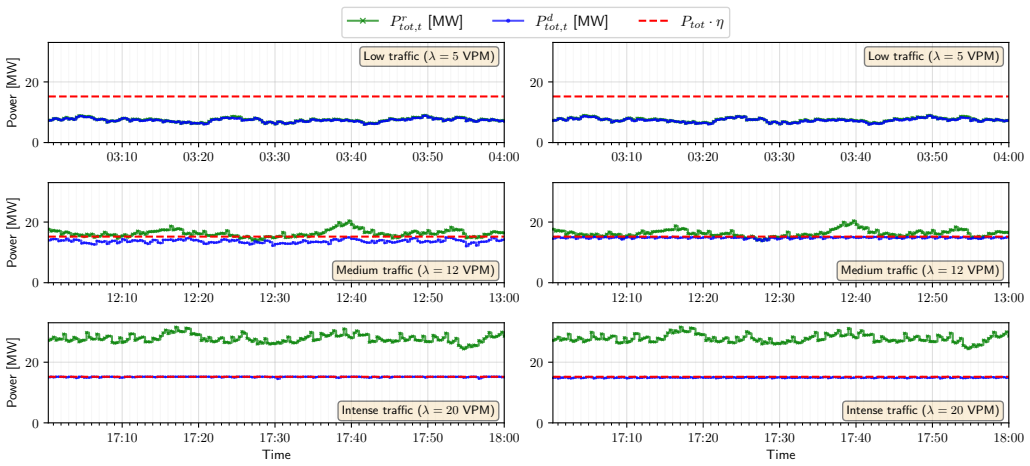
Our MPC-based strategy addresses both regimes -- maximizing power utilization during saturation through dynamic stripe rebalancing, and improving satisfaction fairness under scarcity by aggressively prioritizing depleted batteries at the expense of well-charged vehicles. The framework is implemented and evaluated through SUMO-based simulations on a realistic 10 km urban scenario in Istanbul, Turkey, under varying traffic intensities, demonstrating two critical limitations of uncoordinated allocation: resource utilization remains suboptimal despite available power when demand saturates system capacity, and uniform distribution leaves a heavy tail of critically unsatisfied vehicles that may be
What carries the argument
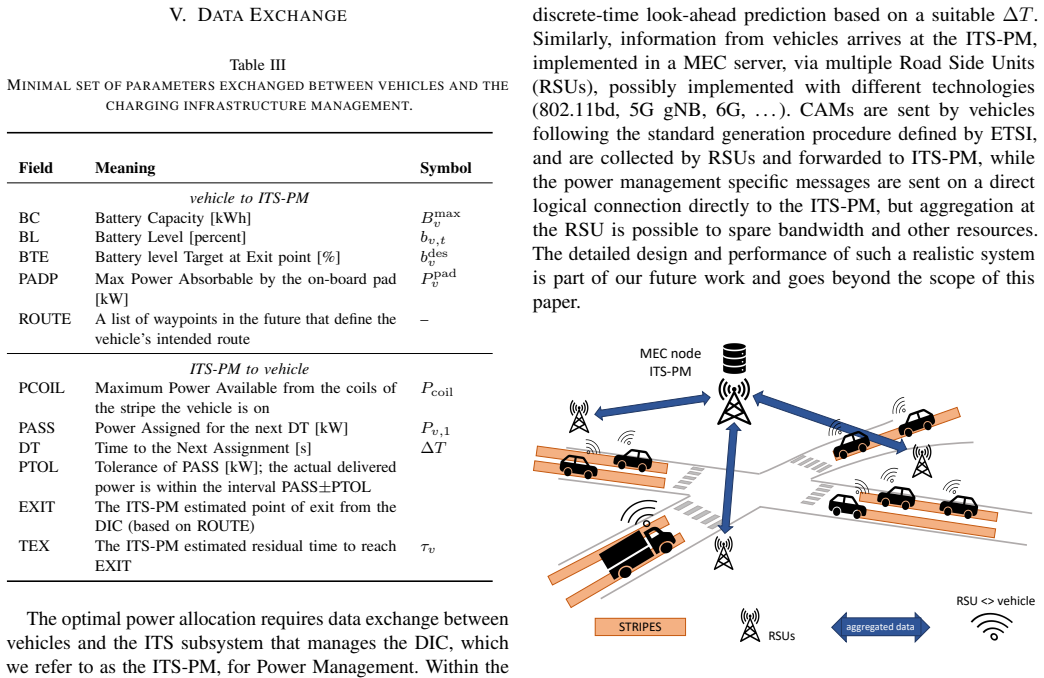
Model Predictive Control (MPC) optimization framework that dynamically allocates power to charging stripes based on predicted vehicle battery states and system constraints, enabled by multi-access edge computing (MEC) and vehicle-to-infrastructure communications.
If this is right
- Dynamic stripe rebalancing increases overall power utilization when demand saturates but does not exceed system capacity.
- Prioritizing vehicles with depleted batteries reduces the heavy tail of critically unsatisfied vehicles during power scarcity.
- Using edge computing allows real-time optimization without central bottlenecks.
- The open-source release of the framework and simulation tools enables further development and testing in this domain.
Where Pith is reading between the lines
- Smaller vehicle batteries could become viable if DIC systems reliably deliver power on demand, lowering EV purchase costs.
- Extending the framework to coordinate with traffic signal control or route planning could further optimize charging opportunities.
- Scaling to city-wide networks might reveal additional benefits or challenges in inter-edge coordination.
- Real-world deployment would require accurate prediction models for traffic and communication delays beyond simulation assumptions.
Load-bearing premise
The SUMO-based simulations of the 10 km Istanbul scenario accurately capture real-world traffic dynamics, communication latencies, power transfer efficiencies, and driver behaviors under varying intensities.
What would settle it
Deploying the MPC controller in a physical dynamic inductive charging testbed on a real road segment and measuring whether overall power utilization increases while the distribution of battery states shows fewer vehicles exiting with critically low charge compared to uncoordinated allocation.
Figures
read the original abstract
Range anxiety and long recharging times remain critical barriers to electric vehicle adoption. Dynamic Inductive Charging (DIC) offers a compelling solution by enabling wireless power transfer while driving, potentially reducing battery size requirements and thus vehicle costs. However, DIC infrastructures are expensive and power-constrained, requiring intelligent resource allocation to maximize user satisfaction and economic viability. We propose a Model Predictive Control framework for optimal power allocation in DIC systems, using edge computing and vehicular communications to prioritize vehicles with critical battery states. The framework is implemented and evaluated through SUMO-based simulations on a realistic 10 km urban scenario in Istanbul, Turkey, under varying traffic intensities. Results demonstrate two critical limitations of uncoordinated allocation. First, resource utilization remains suboptimal despite available power when demand saturates system capacity. Second, when demand exceeds capacity, uniform distribution of power leaves a heavy tail of critically unsatisfied vehicles that may require emergency stops. Our MPC-based strategy addresses both regimes -- maximizing power utilization during saturation through dynamic stripe rebalancing, and improving satisfaction fairness under scarcity by aggressively prioritizing depleted batteries at the expense of well-charged vehicles. The framework and simulation tools are released as open-source to support further research in this emerging domain.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a Model Predictive Control (MPC) framework, implemented via mobile edge computing (MEC) and vehicular communications, for dynamic power allocation in inductive charging (DIC) systems. The central claim is that this MPC strategy improves power utilization under saturation (via dynamic stripe rebalancing) and satisfaction fairness under scarcity (via prioritization of depleted batteries) relative to uncoordinated allocation. These improvements are demonstrated exclusively through SUMO-based simulations of a 10 km Istanbul urban scenario under varying traffic intensities; the framework and simulation tools are released as open source.
Significance. If the simulation results prove transferable, the work could offer a practical control approach for resource-constrained DIC infrastructure, addressing utilization and fairness issues that uncoordinated schemes leave unresolved. The open-source release supports reproducibility and further research. However, the significance remains provisional because the performance gains rest entirely on unvalidated simulation fidelity rather than analytical guarantees or field data.
major comments (3)
- [MPC Framework / Method] The MPC formulation (prediction horizon, control interval, cost-function weights balancing utilization, fairness, and battery priority) is not specified with sufficient detail or equations. These parameters are listed as free in the axiom ledger and directly determine the reported rebalancing and prioritization behavior; without them the central claim that the strategy 'addresses both regimes' cannot be reproduced or verified.
- [Simulation Setup and Results] The simulation results (Section on SUMO evaluation) report improvements in utilization and fairness but provide no calibration against real traffic counts, power-transfer measurements, or V2X latency traces from the Istanbul corridor. No sensitivity analysis on communication delays, inductive efficiency, or driver-behavior parameters is shown. Because the skeptic correctly identifies simulation fidelity as the load-bearing assumption, any material deviation from these modeling choices renders the quantitative gains simulation artifacts rather than transferable properties.
- [Results / Evaluation] The abstract and results claim that uncoordinated allocation leaves 'a heavy tail of critically unsatisfied vehicles' and 'suboptimal utilization despite available power.' These statements are not supported by explicit metrics (e.g., fraction of vehicles below a critical SoC threshold, or utilization ratio versus capacity) or statistical tests; the comparison is only to a single baseline without ablation of the MPC components.
minor comments (2)
- [Notation / Preliminaries] Notation for battery state, power-transfer efficiency, and satisfaction metric should be defined once in a nomenclature table or early section to avoid ambiguity when reading the cost function and fairness metric.
- [Conclusion / Reproducibility] The open-source repository link and exact SUMO scenario files (network, traffic demand, DIC stripe placement) should be provided with a persistent DOI or commit hash rather than a generic statement.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment point by point below and indicate the planned revisions.
read point-by-point responses
-
Referee: [MPC Framework / Method] The MPC formulation (prediction horizon, control interval, cost-function weights balancing utilization, fairness, and battery priority) is not specified with sufficient detail or equations. These parameters are listed as free in the axiom ledger and directly determine the reported rebalancing and prioritization behavior; without them the central claim that the strategy 'addresses both regimes' cannot be reproduced or verified.
Authors: We agree that the MPC formulation requires more explicit specification to support reproducibility. The prediction horizon, control interval, and cost-function weights were not detailed in the original manuscript. In the revised version, we will include the complete MPC optimization problem, with all equations for the objective function (incorporating utilization, fairness, and battery-priority terms), state predictions, constraints, and the specific parameter values used (horizon length, sampling time, and weights). This will allow verification of the dynamic rebalancing and prioritization behaviors. revision: yes
-
Referee: [Simulation Setup and Results] The simulation results (Section on SUMO evaluation) report improvements in utilization and fairness but provide no calibration against real traffic counts, power-transfer measurements, or V2X latency traces from the Istanbul corridor. No sensitivity analysis on communication delays, inductive efficiency, or driver-behavior parameters is shown. Because the skeptic correctly identifies simulation fidelity as the load-bearing assumption, any material deviation from these modeling choices renders the quantitative gains simulation artifacts rather than transferable properties.
Authors: We acknowledge that the evaluation relies on SUMO simulations of a realistic 10 km Istanbul scenario without calibration to real traffic counts, power-transfer measurements, or V2X traces. As this is a simulation-based study, such empirical data were not available. To address robustness concerns, we will add a sensitivity analysis section varying communication delays, inductive efficiency, and driver-behavior parameters, and report their effects on the results. We will also expand the description of modeling assumptions and their justification. revision: partial
-
Referee: [Results / Evaluation] The abstract and results claim that uncoordinated allocation leaves 'a heavy tail of critically unsatisfied vehicles' and 'suboptimal utilization despite available power.' These statements are not supported by explicit metrics (e.g., fraction of vehicles below a critical SoC threshold, or utilization ratio versus capacity) or statistical tests; the comparison is only to a single baseline without ablation of the MPC components.
Authors: We agree that the claims would be strengthened by explicit metrics and further analysis. In the revision, we will add quantitative metrics such as the fraction of vehicles below critical SoC thresholds and the utilization ratio versus available capacity. We will also include an ablation study isolating the contributions of rebalancing and prioritization, along with statistical comparisons against the uncoordinated baseline. revision: yes
- Calibration against real traffic counts, power-transfer measurements, or V2X latency traces from the Istanbul corridor, as the study is simulation-based and lacks access to proprietary field data.
Circularity Check
No significant circularity; standard MPC applied to DIC with independent SUMO evaluation
full rationale
The paper proposes a Model Predictive Control framework for power allocation in dynamic inductive charging, drawing on established MPC techniques and edge computing. It evaluates the approach via SUMO simulations on a 10 km Istanbul scenario, comparing against uncoordinated baselines under saturation and scarcity regimes. No derivation step reduces by construction to a fitted parameter renamed as prediction, a self-citation chain, or an ansatz smuggled from prior author work; the reported improvements in utilization and fairness are outputs of the simulation rather than tautological redefinitions of inputs. The open-source release of the framework and tools further enables external verification independent of the paper's own equations.
Axiom & Free-Parameter Ledger
free parameters (2)
- MPC prediction horizon and control interval
- Cost function weights balancing utilization, fairness, and battery priority
axioms (2)
- domain assumption SUMO traffic simulator provides a sufficiently accurate model of vehicle trajectories, speeds, and power demands for the Istanbul urban scenario
- domain assumption Edge computing nodes can execute the MPC optimization and communicate power commands with low enough latency for real-time control
Reference graph
Works this paper leans on
-
[1]
A. Sagaret al., “A Comprehensive Review of the Recent Development of Wireless Power Transfer Technologies for Electric Vehicle Charging Systems,”IEEE Access, vol. 11, pp. 83703–83751, 2023
work page 2023
-
[2]
A Comprehensive Review of Wireless Power Transfer Techniques for Electric Vehicle Charging,
A. Farghlyet al., “A Comprehensive Review of Wireless Power Transfer Techniques for Electric Vehicle Charging,”IEEE Access, vol. 13, pp. 199683–199718, 2025
work page 2025
-
[3]
T. Bouanou, H. El Fadil, and H. Abbade, “Wireless charging for electric vehicles: A comprehensive review of technologies, challenges, and solutions,”Journal of Power Sources, Elsevier, vol. 660, p. 238501, 2025
work page 2025
-
[4]
Economic Analysis of the Dynamic Charging Electric Vehicle,
S. Jeong, Y . J. Jang, and D. Kum, “Economic Analysis of the Dynamic Charging Electric Vehicle,”IEEE Trans. on Power Electronics, vol. 30, pp. 6368–6377, 11 2015
work page 2015
-
[5]
Arena of the future (arena del futuro),
Electreon, “Arena of the future (arena del futuro),” 2025. https://electreon.com/projects/arena-of-the-future
work page 2025
-
[6]
The road to zero emissions: Michigan unveils first wireless charging street,
Michigan Department of Transportation, “The road to zero emissions: Michigan unveils first wireless charging street,” 2023. https://www.michigan.gov/mdot/travel/mobility/initiatives/wireless- charging-roadway
work page 2023
-
[7]
System optimization of the On- Line Electric Vehicle operating in a closed environment,
Y . J. Jang, S. Jeong, and Y . D. Ko, “System optimization of the On- Line Electric Vehicle operating in a closed environment,”Computers & Industrial Engineering, vol. 80, pp. 222–235, 2 2015
work page 2015
-
[8]
Dynamic charging as a complementary approach in modern EV charging infrastructure,
D. M. Nguyen, M. A. Kishk, and M.-S. Alouini, “Dynamic charging as a complementary approach in modern EV charging infrastructure,”Sci Rep, Nature, vol. 14, 3 5785 (2024)
work page 2024
-
[9]
I. Hwang, Y . J. Jang, Y . D. Ko, and M. S. Lee, “System optimization for dynamic wireless charging electric vehicles operating in a multiple-route environment,”IEEE Trans. on Intelligent Transportation Systems, vol. 19, no. 6, pp. 1709–1726, 2018
work page 2018
-
[10]
L. Kochet al., “Accurate physics-based modeling of electric vehicle energy consumption in the SUMO traffic microsimulator,” inProceedings of the IEEE International Intelligent Transportation Systems Conference (ITSC), pp. 1650–1657, 2021
work page 2021
-
[11]
X. Ren, C. S. Lai, Z. Guo, and G. Taylor, “Eco-driving with partial wireless charging lane at signalized intersection: A reinforcement learning approach,”IEEE Trans. on Consumer Electronics, vol. 70, pp. 6547–6559, 11 2024
work page 2024
-
[12]
V . Apicella, A. Turati, G. Megna, and B. Carambia, “Sizing Methodology of Dynamic Wireless Charging Infrastructures for Electric Vehicles in Highways: An Italian Case Study,”Energies, MDPI, vol. 17, no. 16, 2024
work page 2024
-
[13]
Mobile Edge Computing for Big-Data-Enabled Electric Vehicle Charging,
Y . Caoet al., “Mobile Edge Computing for Big-Data-Enabled Electric Vehicle Charging,”IEEE Communications Magazine, vol. 56, no. 3, pp. 150–156, 2018
work page 2018
-
[14]
Edge Intelligence for Plug-in Electrical Vehicle Charging Service,
Y . Zhanget al., “Edge Intelligence for Plug-in Electrical Vehicle Charging Service,”IEEE Network, vol. 35, no. 3, pp. 81–87, 2021
work page 2021
-
[15]
Wireless Power Transfer for Vehicular Applications: Overview and Challenges,
D. Patilet al., “Wireless Power Transfer for Vehicular Applications: Overview and Challenges,”IEEE Trans. on Transportation Electrification, vol. 4, pp. 3–37, 3 2018
work page 2018
-
[16]
CVXPY: A Python-Embedded Modeling Language for Convex Optimization,
S. Diamond and S. Boyd, “CVXPY: A Python-Embedded Modeling Language for Convex Optimization,”Journal of Machine Learning Research, vol. 17, no. 83, pp. 1–5, 2016
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.