Recognition: unknown
A skin-like conformal sensor for real-time shape mapping
Pith reviewed 2026-05-10 16:15 UTC · model grok-4.3
The pith
A skin-like sensor reconstructs 3D deformations in real time from distributed strain measurements with 0.62 mm mean error.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
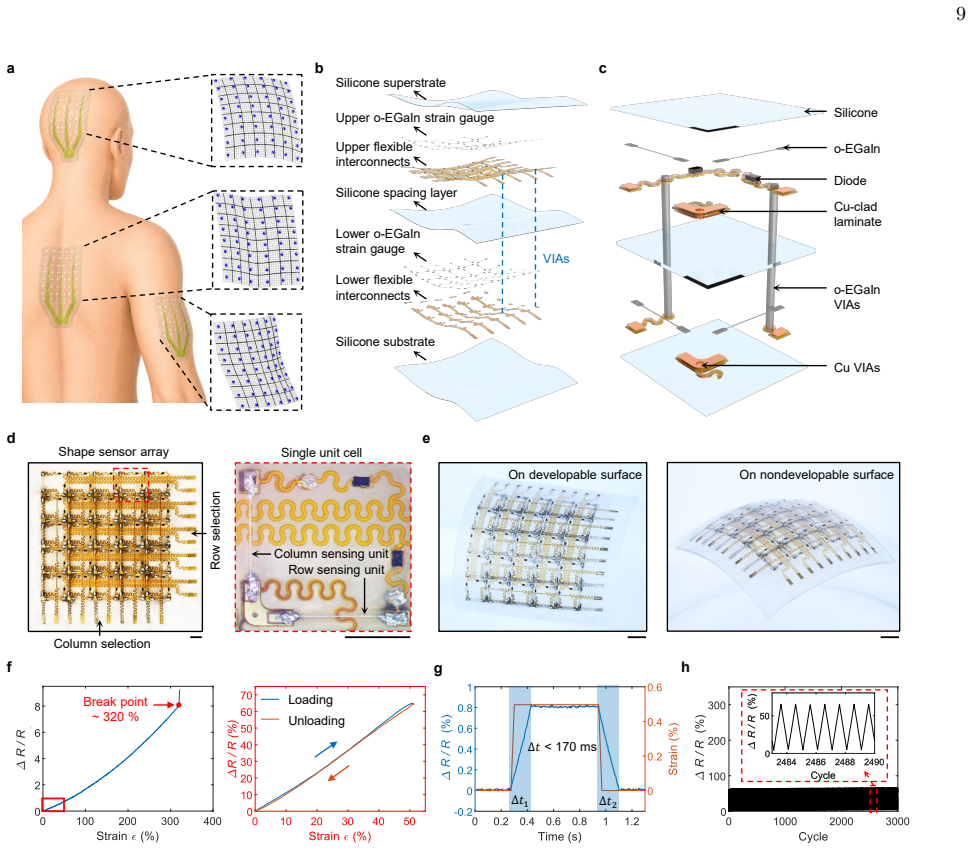
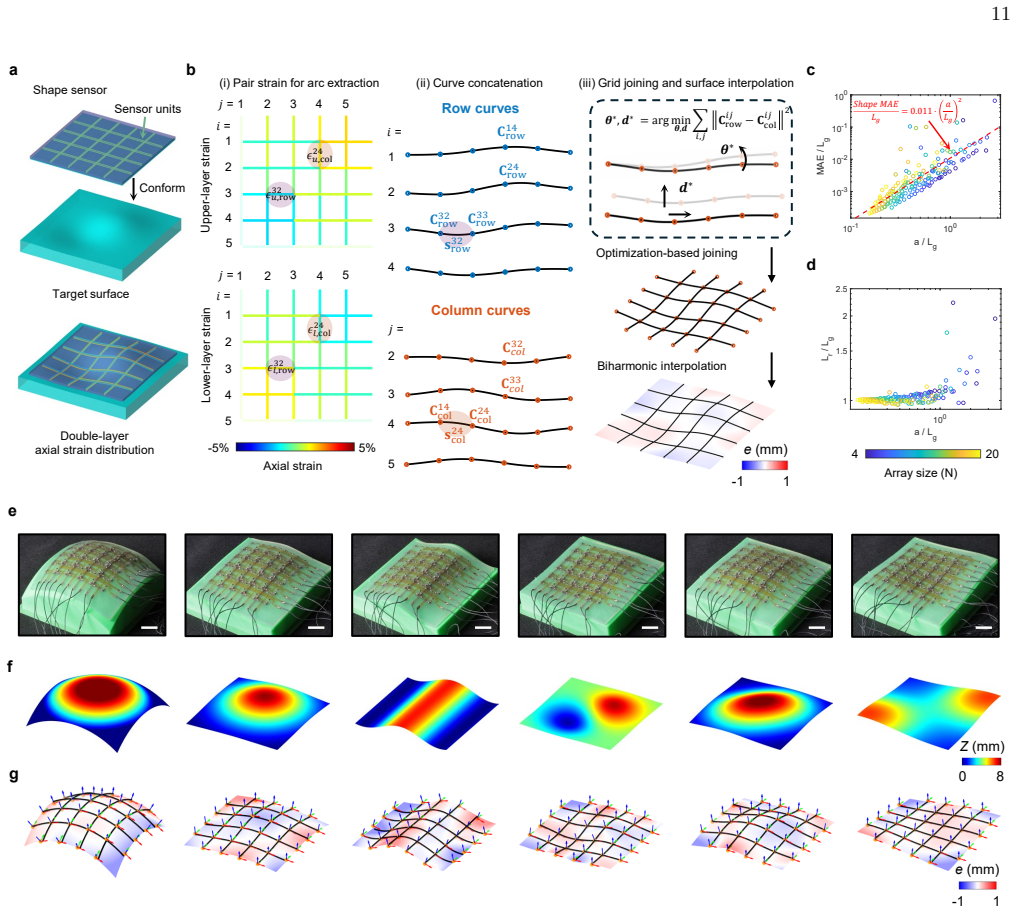
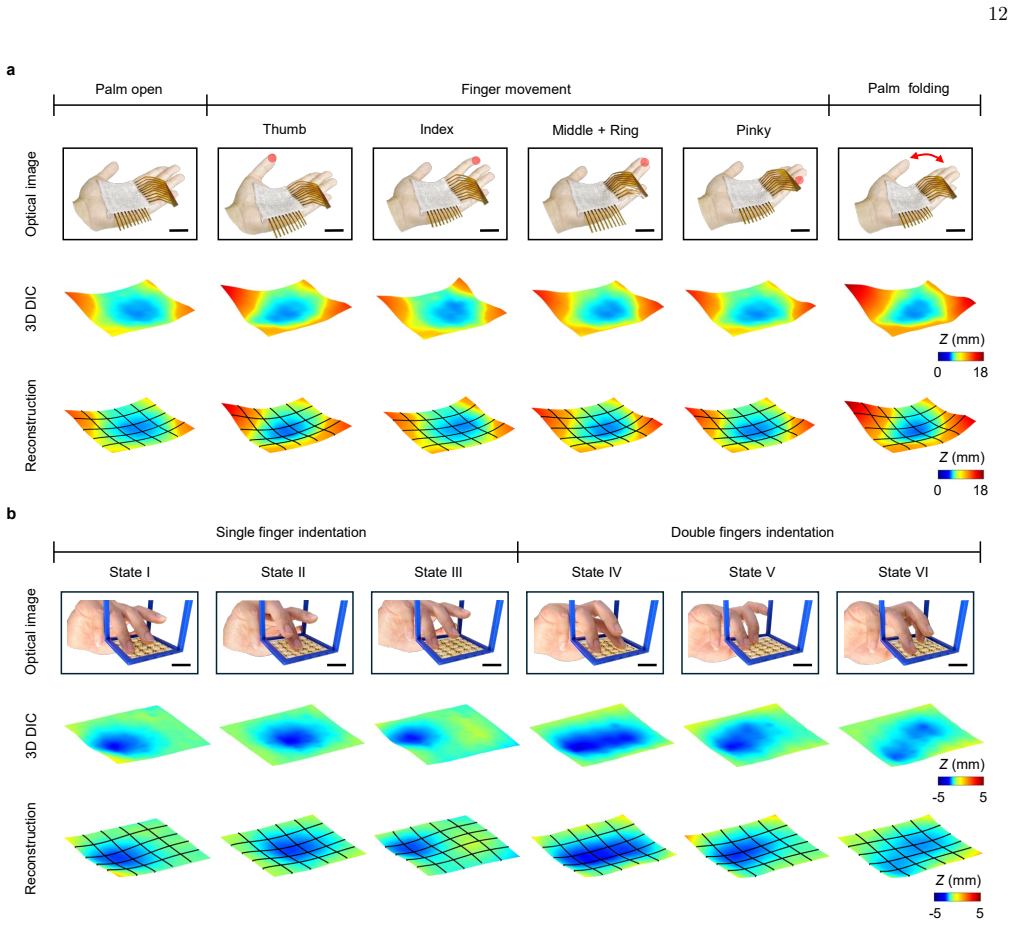
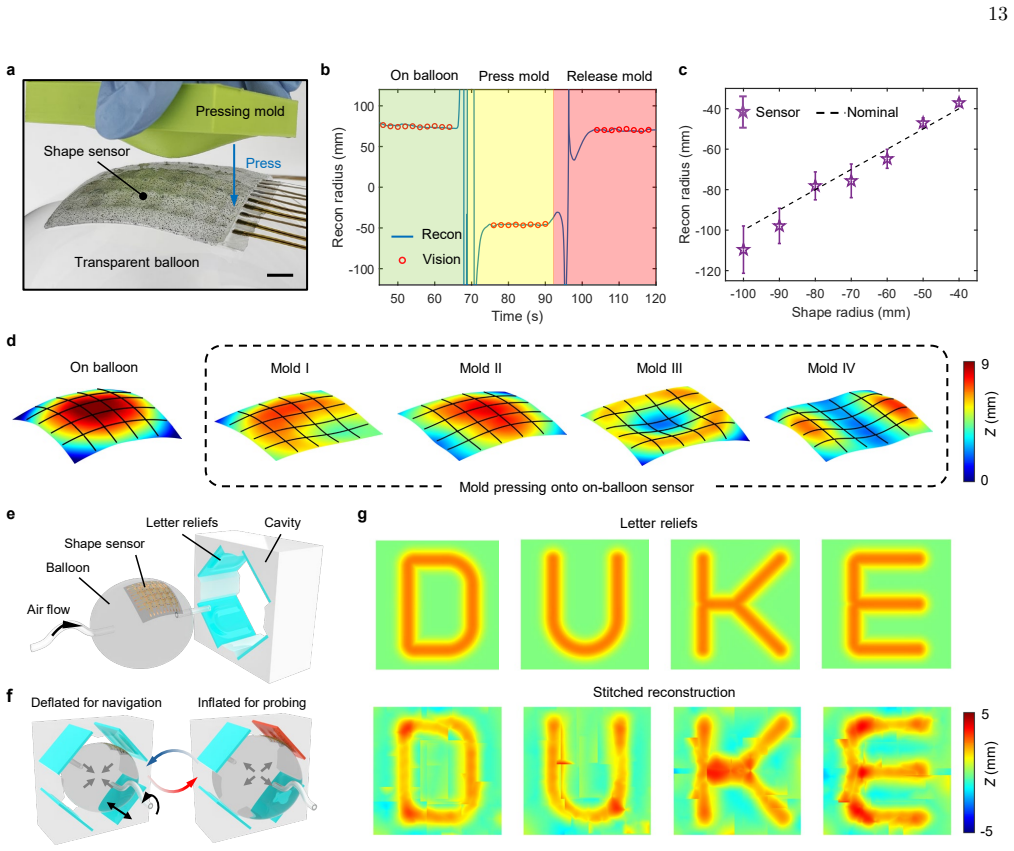
The device embeds a 2D array of mirror-stacked printed oxidized eutectic gallium-indium strain gauges within an elastomeric film to measure off-neutral-axis strains. Combined with a mechanics-informed observation model and a fast optimization routine, the system estimates local curvature, elongation, offset, and orientation under concurrent stretching, bending, and indentation, enabling reconstruction of complex surfaces. A 5-by-5 array with a 12 mm pitch achieves a mean surface reconstruction error of 0.62 mm with 0.1 s latency across all tested scenarios.
What carries the argument
Mechanics-informed observation model paired with fast optimization that extracts local curvature, elongation, offset, and orientation from distributed off-neutral-axis strain measurements.
Load-bearing premise
The mechanics-informed observation model combined with the fast optimization routine can uniquely and accurately estimate local curvature, elongation, offset, and orientation from the strain measurements under concurrent stretching, bending, and indentation without significant ambiguities or unmodeled effects.
What would settle it
A demonstration that the optimization yields multiple equally likely surface reconstructions or errors exceeding 1 mm when the sensor undergoes simultaneous stretching, bending, and indentation would falsify the uniqueness and accuracy of the model.
Figures

read the original abstract
Reliable real-time 3D shape sensing is essential for robust control and interpretation of deformable systems during motion. Existing vision-based approaches require line-of-sight and complex instrumentation, limiting operation in occluded and space-constrained settings. Here, we introduce a scalable, skin-like sensor that reconstructs its continuous 3D deformation in real time from distributed strain measurements. The device embeds a 2D array of mirror-stacked, printed oxidized eutectic gallium-indium (o-EGaIn) strain gauges within an elastomeric film to measure off-neutral-axis strains. Combined with a mechanics-informed observation model and a fast optimization routine, the system estimates local curvature, elongation, offset, and orientation under concurrent stretching, bending, and indentation, enabling reconstruction of complex surfaces. A 5-by-5 array with a 12 mm pitch achieves a mean surface reconstruction error of 0.62 mm with 0.1s latency across all tested scenarios. When conforming to complex surfaces, the sensor provides fast 3D shape mapping of the underlying geometry. Demonstrations involving palm gesturing, finger indentation, and contact-induced balloon deformation highlight utility for epidermal motion tracking, haptic interaction, and intraoperative monitoring.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a skin-like conformal sensor consisting of a 2D array of mirror-stacked printed o-EGaIn strain gauges embedded in an elastomeric film. Off-neutral-axis strain measurements are fed into a mechanics-informed observation model and fast optimization routine that estimates four local parameters (curvature, elongation, offset, and orientation) to enable real-time 3D surface reconstruction under concurrent stretching, bending, and indentation. The central performance claim is that a 5-by-5 array with 12 mm pitch achieves a mean surface reconstruction error of 0.62 mm at 0.1 s latency across tested scenarios, with demonstrations on palm gesturing, finger indentation, and balloon deformation.
Significance. If the reconstruction accuracy and uniqueness claims hold, the work offers a practical, vision-independent solution for real-time shape mapping in occluded or space-constrained settings, with clear relevance to wearable haptics, soft robotics, and intraoperative monitoring. The scalable printed-electronics approach and low-latency optimization are strengths that could enable new applications in epidermal motion tracking and contact sensing.
major comments (1)
- [mechanics-informed observation model (abstract and methods)] The abstract and associated methods description claim that the mechanics-informed observation model combined with the fast optimizer can uniquely recover the four local parameters (curvature, elongation, offset, orientation) from off-neutral-axis strains under concurrent deformations. No analysis is provided of the rank or conditioning of the observation Jacobian, nor tests for multiple parameter combinations that could produce indistinguishable strain patterns; this directly underpins the reported 0.62 mm mean reconstruction error and must be addressed to substantiate the central claim.
minor comments (1)
- [abstract] The term 'mirror-stacked' for the strain gauges is used without a brief definition or diagram reference; adding a short explanation or cross-reference to a figure would improve accessibility for readers outside the stretchable-electronics community.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the single major comment regarding the uniqueness of parameter recovery in the mechanics-informed observation model below, and we will incorporate the requested analysis in the revised version.
read point-by-point responses
-
Referee: The abstract and associated methods description claim that the mechanics-informed observation model combined with the fast optimizer can uniquely recover the four local parameters (curvature, elongation, offset, orientation) from off-neutral-axis strains under concurrent deformations. No analysis is provided of the rank or conditioning of the observation Jacobian, nor tests for multiple parameter combinations that could produce indistinguishable strain patterns; this directly underpins the reported 0.62 mm mean reconstruction error and must be addressed to substantiate the central claim.
Authors: We agree that a formal analysis of the observation Jacobian would strengthen the uniqueness claim. Our current validation relies on empirical convergence of the optimizer to ground-truth parameters across diverse deformation scenarios (stretching, bending, indentation), but we did not include an explicit rank/conditioning study or degeneracy tests in the original submission. In the revised manuscript we will add a dedicated subsection to the Methods that (i) derives the 4xN observation Jacobian for the mirror-stacked strain gauges, (ii) reports its numerical rank and condition number over the physically relevant parameter ranges, and (iii) presents Monte-Carlo results testing whether distinct parameter quadruplets can produce indistinguishable strain vectors within sensor noise. These additions will directly support the reported 0.62 mm reconstruction accuracy. revision: yes
Circularity Check
Mechanics-informed inverse modeling provides independent reconstruction capability
full rationale
The paper derives surface reconstruction from distributed strain measurements via an external mechanics-informed observation model plus a fast optimizer that inverts for local curvature, elongation, offset, and orientation. No step in the provided derivation chain reduces the reported 0.62 mm error or 0.1 s latency to a fitted parameter or self-citation by construction; the observation model is treated as an independent input whose validity is tested against physical scenarios rather than assumed tautologically. The approach remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The elastomeric film and embedded strain gauges follow standard continuum mechanics relations linking off-neutral-axis strains to local curvature, elongation, and orientation.
Reference graph
Works this paper leans on
-
[1]
H. Hu, H. Huang, M. Li, X. Gao, L. Yin, R. Qi, R. S. Wu, X. Chen, Y. Ma, K. Shi,et al., A wearable cardiac ultrasound imager, Nature613, 667 (2023)
2023
-
[2]
M. Han, L. Chen, K. Aras, C. Liang, X. Chen, H. Zhao, K. Li, N. R. Faye, B. Sun, J.-H. Kim,et al., Catheter- integrated soft multilayer electronic arrays for multi- plexed sensing and actuation during cardiac surgery, Na- ture biomedical engineering4, 997 (2020)
2020
-
[3]
Z. Zhu, H. S. Park, and M. C. McAlpine, 3d printed deformable sensors, Science advances6, eaba5575 (2020)
2020
-
[4]
J. Liu, N. Liu, Y. Xu, M. Wu, H. Zhang, Y. Wang, Y. Yan, A. Hill, R. Song, Z. Xu,et al., Bioresorbable shape-adaptive structures for ultrasonic monitoring of deep-tissue homeostasis, Science383, 1096 (2024)
2024
-
[5]
Darma, M
P. Darma, M. Baidillah, M. Sifuna, and M. Takei, Real- time dynamic imaging method for flexible boundary sen- sor in wearable electrical impedance tomography, IEEE sensors journal20, 9469 (2020). 6
2020
-
[6]
S. Zhou, X. Gao, G. Park, X. Yang, B. Qi, M. Lin, H. Huang, Y. Bian, H. Hu, X. Chen,et al., Transcranial volumetric imaging using a conformal ultrasound patch, Nature629, 810 (2024)
2024
-
[7]
Zhang, Y
J. Zhang, Y. Hu, H. Qin, C. Pu, T. Zhang, J. Sun, and C. Peng, Flexible skull-conformal phased array for aberration-corrected transcranial focused ultrasound therapy, Ultrasonics , 108089 (2026)
2026
-
[8]
Kashyap, A
V. Kashyap, A. Caprio, T. Doshi, S.-J. Jang, C. F. Liu, B. Mosadegh, and S. Dunham, Multilayer fabrication of durable catheter-deployable soft robotic sensor arrays for efficient left atrial mapping, Science advances6, eabc6800 (2020)
2020
-
[9]
Z. Lin, A. Gao, X. Ai, H. Gao, Y. Fu, W. Chen, and G.-Z. Yang, Arei: Augmented-reality-assisted touchless teleop- erated robot for endoluminal intervention, IEEE/ASME Transactions on Mechatronics27, 3144 (2021)
2021
-
[10]
Lilge, T
S. Lilge, T. D. Barfoot, and J. Burgner-Kahrs, State es- timation for continuum multi-robot systems on se (3), IEEE Transactions on Robotics (2024)
2024
-
[11]
Glauser, D
O. Glauser, D. Panozzo, O. Hilliges, and O. Sorkine- Hornung, Deformation capture via soft and stretchable sensor arrays, ACM Transactions on Graphics (TOG)38, 2 (2019)
2019
-
[12]
Glauser, S
O. Glauser, S. Wu, D. Panozzo, O. Hilliges, and O. Sorkine-Hornung, Interactive hand pose estimation using a stretch-sensing soft glove, ACM Transactions on Graphics (ToG)38, 4 (2019)
2019
-
[13]
Z. Li, X. Tian, C.-W. Qiu, and J. S. Ho, Metasurfaces for bioelectronics and healthcare, Nature Electronics4, 382 (2021)
2021
-
[14]
F. Li, T. Pan, W. Li, Z. Peng, D. Guo, X. Jia, T. Hu, L. Wang, W. Wang, M. Gao,et al., Flexible intelligent microwave metasurface with shape-guided adaptive pro- gramming, Nature Communications16, 3161 (2025)
2025
-
[15]
Gherlone, P
M. Gherlone, P. Cerracchio, and M. Mattone, Shape sens- ing methods: Review and experimental comparison on a wing-shaped plate, Progress in Aerospace Sciences99, 14 (2018)
2018
-
[16]
Derkevorkian, S
A. Derkevorkian, S. F. Masri, J. Alvarenga, H. Boussalis, J. Bakalyar, and W. L. Richards, Strain-based deforma- tion shape-estimation algorithm for control and monitor- ing applications, AIAA journal51, 2231 (2013)
2013
-
[17]
Y. Bai, H. Wang, Y. Xue, Y. Pan, J.-T. Kim, X. Ni, T.-L. Liu, Y. Yang, M. Han, Y. Huang,et al., A dynamically reprogrammable surface with self-evolving shape morph- ing, Nature609, 701 (2022)
2022
-
[18]
Z. Feng, H. Hooshangnejad, D. Sforza, P. Vagdargi, M. Bell, A. Uneri, and K. Ding, Real-time element posi- tion tracking of flexible array transducer for ultrasound beamforming, inMedical Imaging 2023: Ultrasonic Imag- ing and Tomography, Vol. 12470 (SPIE, 2023) pp. 36–43
2023
-
[19]
Vlasic, P
D. Vlasic, P. Peers, I. Baran, P. Debevec, J. Popovi´ c, S. Rusinkiewicz, and W. Matusik, Dynamic shape cap- ture using multi-view photometric stereo, inACM SIG- GRAPH Asia 2009 papers(2009) pp. 1–11
2009
-
[20]
S. Li, T. Wu, J. Xu, Y. Huang, Z. Zhang, H. Zhao, Q. Xu, Z. Wang, L. Ye, Y. Yang,et al., Biomimetic mul- timodal tactile sensing enables human-like robotic per- ception, Nature Sensors1, 52 (2026)
2026
-
[21]
W. Yuan, S. Dong, and E. H. Adelson, Gelsight: High- resolution robot tactile sensors for estimating geometry and force, Sensors17, 2762 (2017)
2017
-
[22]
Palieri, B
M. Palieri, B. Morrell, A. Thakur, K. Ebadi, J. Nash, A. Chatterjee, C. Kanellakis, L. Carlone, C. Guarag- nella, and A.-a. Agha-Mohammadi, Locus: A multi- sensor lidar-centric solution for high-precision odometry and 3d mapping in real-time, IEEE Robotics and Au- tomation Letters6, 421 (2020)
2020
-
[23]
Zhu, S.-Z
Z. Zhu, S.-Z. Guo, T. Hirdler, C. Eide, X. Fan, J. Tolar, and M. C. McAlpine, 3d printed functional and biological materials on moving freeform surfaces, Advanced Mate- rials30, 1707495 (2018)
2018
-
[24]
Majidi, R
C. Majidi, R. Kramer, and R. Wood, A non-differential elastomer curvature sensor for softer-than-skin electron- ics, Smart materials and structures20, 105017 (2011)
2011
-
[25]
Medina, A
O. Medina, A. Shapiro, and N. Shvalb, Resistor-based shape sensor for a spatial flexible manifold, IEEE Sensors Journal17, 46 (2016)
2016
-
[26]
L. Pan, T. Zhang, Y. Cheng, Z. Ma, and J. Li, Shape sensing for continuum robots based on mwcnts-pdms flex- ible resistive strain sensors, IEEE Transactions on Med- ical Robotics and Bionics (2025)
2025
-
[27]
Yamada, Y
T. Yamada, Y. Hayamizu, Y. Yamamoto, Y. Yomogida, A. Izadi-Najafabadi, D. N. Futaba, and K. Hata, A stretchable carbon nanotube strain sensor for human- motion detection, Nature nanotechnology6, 296 (2011)
2011
-
[28]
L. Xu, J. Ge, J. H. Patel, and M. P. Fok, Dual-layer orthogonal fiber bragg grating mesh based soft sensor for 3-dimensional shape sensing, Optics express25, 24727 (2017)
2017
-
[29]
L. Xu, N. Liu, J. Ge, X. Wang, and M. P. Fok, Stretchable fiber-bragg-grating-based sensor, Optics letters43, 2503 (2018)
2018
-
[30]
Van Meerbeek, C
I. Van Meerbeek, C. De Sa, and R. Shepherd, Soft op- toelectronic sensory foams with proprioception, Science Robotics3, eaau2489 (2018)
2018
-
[31]
T. L. T. Lun, K. Wang, J. D. Ho, K.-H. Lee, K. Y. Sze, and K.-W. Kwok, Real-time surface shape sensing for soft and flexible structures using fiber bragg gratings, IEEE Robotics and Automation Letters4, 1454 (2019)
2019
-
[32]
H. Bai, S. Li, J. Barreiros, Y. Tu, C. R. Pollock, and R. F. Shepherd, Stretchable distributed fiber-optic sen- sors, Science370, 848 (2020)
2020
-
[33]
S. E. Navarro, S. Nagels, H. Alagi, L.-M. Faller, O. Goury, T. Morales-Bieze, H. Zangl, B. Hein, R. Ra- makers, W. Deferme,et al., A model-based sensor fusion approach for force and shape estimation in soft robotics, IEEE Robotics and Automation Letters5, 5621 (2020)
2020
-
[34]
Rendl, D
C. Rendl, D. Kim, S. Fanello, P. Parzer, C. Rhemann, J. Taylor, M. Zirkl, G. Scheipl, T. Rothl¨ ander, M. Haller, et al., Flexsense: a transparent self-sensing deformable surface, inProceedings of the 27th annual ACM sympo- sium on User interface software and technology(2014) pp. 129–138
2014
-
[35]
Hellebrekers, O
T. Hellebrekers, O. Kroemer, and C. Majidi, Soft mag- netic skin for continuous deformation sensing, Advanced Intelligent Systems1, 1900025 (2019)
2019
-
[36]
Lilge, T
S. Lilge, T. D. Barfoot, and J. Burgner-Kahrs, Contin- uum robot state estimation using gaussian process re- gression on se (3), The International Journal of Robotics Research41, 1099 (2022)
2022
-
[37]
Xiang, D
P. Xiang, D. Sun, G. Ma, H. Zhang, R. Xiong, Y. Wang, H. Lu, and T. Xu, A portable and flexible intermediary patch for in vivo magnetic localization, Nature Sensors , 1 (2026)
2026
-
[38]
Mittendorfer and G
P. Mittendorfer and G. Cheng, 3d surface reconstruc- tion for robotic body parts with artificial skins, in 7 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems(IEEE, 2012) pp. 4505–4510
2012
-
[39]
Z. Zhou, P. Chen, Y. Lu, Q. Cui, D. Pan, Y. Liu, J. Li, Y. Zhang, Y. Tao, X. Liu,et al., 3d deformation capture via a configurable self-sensing imu sensor network, Pro- ceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies7, 1 (2023)
2023
-
[40]
D. Shah, S. J. Woodman, L. Sanchez-Botero, S. Liu, and R. Kramer-Bottiglio, Stretchable shape-sensing sheets, Advanced Intelligent Systems5, 2300343 (2023)
2023
-
[41]
Al-Ahmad, M
O. Al-Ahmad, M. Ourak, J. Van Roosbroeck, J. Vlekken, and E. Vander Poorten, Improved fbg-based shape sens- ing methods for vascular catheterization treatment, IEEE Robotics and Automation Letters5, 4687 (2020)
2020
-
[42]
C. D. Modes, K. Bhattacharya, and M. Warner, Gaus- sian curvature from flat elastica sheets, Proceedings of the Royal Society A: Mathematical, Physical and Engi- neering Sciences467, 1121 (2011)
2011
-
[43]
K.-H. Ha, Z. Li, S. Kim, H. Huh, Z. Wang, H. Shi, C. Block, S. Bhattacharya, and N. Lu, Stretchable hy- brid response pressure sensors, Matter7, 1895 (2024)
2024
-
[44]
S. Liu, J. He, Y. Rao, Z. Dai, H. Ye, J. C. Tanir, Y. Li, and N. Lu, Conformability of flexible sheets on spherical surfaces, Science Advances9, eadf2709 (2023)
2023
-
[45]
T. Kim, S. Lee, T. Hong, G. Shin, T. Kim, and Y.-L. Park, Heterogeneous sensing in a multifunctional soft sensor for human-robot interfaces, Science robotics5, eabc6878 (2020)
2020
-
[46]
E. L. White, J. C. Case, and R. K. Kramer, Multi-mode strain and curvature sensors for soft robotic applications, Sensors and Actuators A: Physical253, 188 (2017)
2017
-
[47]
Leber, C
A. Leber, C. Dong, R. Chandran, T. Das Gupta, N. Bar- tolomei, and F. Sorin, Soft and stretchable liquid metal transmission lines as distributed probes of multimodal deformations, Nature Electronics3, 316 (2020)
2020
-
[48]
X. An, Y. Cui, X. Dong, Y. Wang, B. Du, X.-J. Liu, and H. Zhao, Shape reconstruction of soft continuum robots via the fusion of local strains and global poses, Cell Re- ports Physical Science5(2024)
2024
-
[49]
L. Liu, X. Huang, X. Zhang, B. Zhang, H. Xu, V. M. Trivedi, K. Liu, Z. Shaikh, and H. Zhao, Model-based 3d shape reconstruction of soft robots via distributed strain sensing, Soft Robotics (2025)
2025
-
[50]
Y. Lu, W. Chen, B. Li, B. Lu, J. Zhou, Z. Chen, and Y.- H. Liu, A robust graph-based framework for 3-d shape re- construction of flexible medical instruments using multi- core fbgs, IEEE Transactions on Medical Robotics and Bionics5, 472 (2023)
2023
-
[51]
D. Hu, F. Giorgio-Serchi, S. Zhang, and Y. Yang, Stretch- able e-skin and transformer enable high-resolution mor- phological reconstruction for soft robots, Nature Machine Intelligence5, 261 (2023)
2023
-
[52]
R. B. Scharff, G. Fang, Y. Tian, J. Wu, J. M. Geraedts, and C. C. Wang, Sensing and reconstruction of 3-d defor- mation on pneumatic soft robots, IEEE/ASME Transac- tions on Mechatronics26, 1877 (2021)
2021
-
[53]
X. T. Ha, D. Wu, M. Ourak, G. Borghesan, J. Dankel- man, A. Menciassi, and E. Vander Poorten, Shape sens- ing of flexible robots based on deep learning, IEEE Trans- actions on Robotics39, 1580 (2022)
2022
-
[54]
J. Hao, K. Zhang, Z. Zhang, S. Wang, and C. Shi, An online model-free adaptive tracking controller for cable- driven medical continuum manipulators, IEEE Transac- tions on Medical Robotics and Bionics (2023)
2023
-
[55]
J. Wang, C. Lan, C. Liu, Y. Ouyang, T. Qin, W. Lu, Y. Chen, W. Zeng, and S. Y. Philip, Generalizing to un- seen domains: A survey on domain generalization, IEEE transactions on knowledge and data engineering35, 8052 (2022)
2022
-
[56]
Zhang, C
J. Zhang, C. Zhang, H. Li, Y. Cheng, Q. Yang, X. Hou, and F. Chen, Controlling the oxidation and wettability of liquid metal via femtosecond laser for high-resolution flexible electronics, Frontiers in Chemistry10, 965891 (2022)
2022
-
[57]
Kaneko, Y.-F
T. Kaneko, Y.-F. Wang, M. Hori, T. Sekine, A. Yoshida, Y. Takeda, D. Kumaki, and S. Tokito, Printed bilayer liquid metal soft sensors for strain and tactile percep- tion in soft robotics, Advanced Materials Technologies8, 2300436 (2023)
2023
-
[58]
J. Ma, F. Krisnadi, M. H. Vong, M. Kong, O. M. Awartani, and M. D. Dickey, Shaping a soft future: pat- terning liquid metals, Advanced Materials35, 2205196 (2023)
2023
-
[59]
Prutchi and M
D. Prutchi and M. Arcan, Dynamic contact stress analy- sis using a compliant sensor array, Measurement11, 197 (1993)
1993
-
[60]
K. Lee, X. Ni, J. Y. Lee, H. Arafa, D. J. Pe, S. Xu, R. Avila, M. Irie, J. H. Lee, R. L. Easterlin,et al., Mechano-acoustic sensing of physiological processes and body motions via a soft wireless device placed at the suprasternal notch, Nature biomedical engineering4, 148 (2020)
2020
-
[61]
Huang, Y
Z. Huang, Y. Hao, Y. Li, H. Hu, C. Wang, A. Nomoto, T. Pan, Y. Gu, Y. Chen, T. Zhang,et al., Three- dimensional integrated stretchable electronics, Nature electronics1, 473 (2018)
2018
-
[62]
W. Kong, N. U. H. Shah, T. V. Neumann, M. H. Vong, P. Kotagama, M. D. Dickey, R. Y. Wang, and K. Rykaczewski, Oxide-mediated mechanisms of gallium foam generation and stabilization during shear mixing in air, Soft Matter16, 5801 (2020)
2020
-
[63]
B. Xu, M. Yang, W. Cheng, X. Li, X. Xu, W. Li, H. Zhang, and M. Zhou, Precision aerosol-jet micropat- terning of liquid metal for high-performance flexible strain sensors, Nature Communications16, 7920 (2025)
2025
-
[64]
Huang, L
X. Huang, L. Liu, Y. H. Lin, R. Feng, Y. Shen, Y. Chang, and H. Zhao, High-stretchability and low-hysteresis strain sensors using origami-inspired 3d mesostructures, Science Advances9, eadh9799 (2023)
2023
-
[65]
¨Ochsner,Classical beam theories of structural mechan- ics, Vol
A. ¨Ochsner,Classical beam theories of structural mechan- ics, Vol. 42 (Springer, 2021)
2021
-
[66]
E. M. Boujamaa, Y. Soulie, F. Mailly, L. Latorre, and P. Nouet, Rejection of power supply noise in wheatstone bridges: Application to piezoresistive mems, in2008 Symposium on Design, Test, Integration and Packaging of MEMS/MOEMS(IEEE, 2008) pp. 96–99
2008
-
[67]
L. Xu, S. R. Gutbrod, A. P. Bonifas, Y. Su, M. S. Sulkin, N. Lu, H.-J. Chung, K.-I. Jang, Z. Liu, M. Ying, et al., 3d multifunctional integumentary membranes for spatiotemporal cardiac measurements and stimulation across the entire epicardium, Nature communications5, 3329 (2014)
2014
-
[68]
M. J. Cluitmans, P. Bonizzi, J. M. Karel, M. Das, B. L. Kietselaer, M. M. de Jong, F. W. Prinzen, R. L. Peeters, R. L. Westra, and P. G. Volders, In vivo validation of elec- trocardiographic imaging, JACC: Clinical Electrophysi- ology3, 232 (2017). 8
2017
-
[69]
Z. Liu, X. Hu, R. Bo, Y. Yang, X. Cheng, W. Pang, Q. Liu, Y. Wang, S. Wang, S. Xu,et al., A three- dimensionally architected electronic skin mimicking hu- man mechanosensation, Science384, 987 (2024)
2024
-
[70]
X. Chen, Z. Lou, X. Gao, L. Yin, S. Qin, M. Lin, F. Zhang, Y. Lu, S. Ding, R. Liu,et al., A noise-tolerant human–machine interface based on deep learning-enhanced wearable sensors, Nature Sensors1, 39 (2026). 9 Lower o-EGaIn strain gauge Loading Unloading a b Silicone superstrate Upper o-EGaIn strain gauge Upper flexible interconnects Silicone spacing lay...
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.