Recognition: unknown
A Principled Approach for Creating High-fidelity Synthetic Demonstrations for Imitation Learning
Pith reviewed 2026-05-09 14:34 UTC · model grok-4.3
The pith
By modeling expert trajectories as dynamic movement primitives and retargeting them in 3D Gaussian Splatting scenes, the approach generates synthetic demonstrations that better preserve motion structure for improved imitation learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Demonstration synthesis should treat the expert trajectory as a strong prior. Modeling the expert trajectory using Dynamic Movement Primitives (DMPs) and retargeting it to new goals, object configurations, and viewpoints within a reconstructed 3DGS scene yields phase-consistent, shape-preserving motion by construction. To safely realize this expert-preserving diversity in cluttered scenes, an analytic obstacle-aware DMP formulation that operates directly on the continuous density field induced by the 3DGS representation enables collision avoidance while minimally perturbing the nominal expert motion.
What carries the argument
Dynamic Movement Primitives retargeted to new configurations inside a 3D Gaussian Splatting scene, combined with an analytic obstacle-aware formulation that acts on the scene's density field.
If this is right
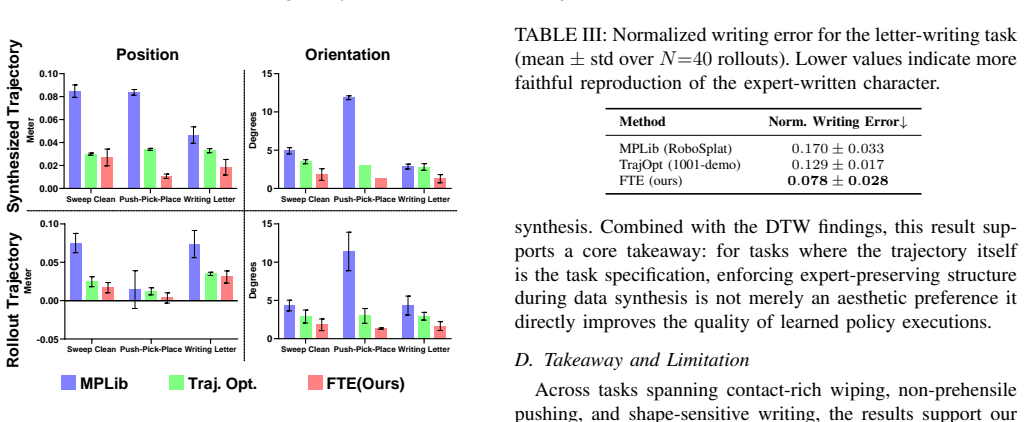
- Trajectories show lower deviation from the expert path than those generated by sampling-based planners or trajectory optimization.
- Collision rates drop in cluttered environments while keeping the original motion shape.
- Diffusion-based visuomotor policies trained on the data reach higher task success rates.
- Photorealistic rendering and geometric reasoning are unified without requiring separate scene representations.
Where Pith is reading between the lines
- The same retargeting principle could reduce the volume of real demonstrations needed for other contact-sensitive tasks such as assembly or insertion.
- If phase consistency holds across longer horizons, the approach might limit error compounding when policies are rolled out in sequence.
- Online updates to the 3DGS model during execution could allow the retargeting step to adapt demonstrations on the fly to changing object positions.
Load-bearing premise
Preserving the expert trajectory's spatial and temporal structure via DMP retargeting is critical for contact-rich and shape-sensitive manipulation tasks and the analytic obstacle-aware formulation can achieve collision avoidance with only minimal perturbation to the nominal motion.
What would settle it
A side-by-side policy training trial on the same three manipulation tasks where the DMP-retargeted demonstrations produce equal or lower success rates than planner- or optimization-based demonstrations would falsify the performance claim.
Figures






read the original abstract
Recent advances in 3D Gaussian Splatting (3DGS) have enabled visually realistic demonstration generation from a single expert trajectory and a short multi-view scan. However, existing 3DGS-based synthesis pipelines typically generate new motions using sampling-based planners or trajectory optimization, which often deviate substantially from the expert's demonstrated path. While such deviations may be acceptable for tasks insensitive to motion shape, they discard subtle spatial and temporal structure that is critical for contact-rich and shape-sensitive manipulation, causing increased demonstration diversity to harm downstream policy learning. We argue that demonstration synthesis should treat the expert trajectory as a strong prior. Building on this principle, we propose a framework that synthesizes diverse task demonstrations while explicitly preserving expert motion structure. We model the expert trajectory using Dynamic Movement Primitives (DMPs) and retarget it to new goals, object configurations, and viewpoints within a reconstructed 3DGS scene, yielding phase-consistent, shape-preserving motion by construction. To safely realize this expert-preserving diversity in cluttered scenes, we introduce an analytic obstacle-aware DMP formulation that operates directly on the continuous density field induced by the 3DGS representation. This enables collision avoidance while minimally perturbing the nominal expert motion, unifying photorealistic rendering and geometric reasoning without additional scene representations. We evaluate our approach on a Spot mobile manipulator across three manipulation tasks with increasing sensitivity to trajectory fidelity. Compared to planner- and optimization-based synthesis, our method produces trajectories with lower deviation and collision rates and yields higher task success when training diffusion-based visuomotor policies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that modeling expert trajectories with Dynamic Movement Primitives (DMPs) and retargeting them to new goals, object configurations, and viewpoints in a 3D Gaussian Splatting (3DGS) scene, combined with an analytic obstacle-aware DMP formulation operating on the 3DGS density field, produces diverse synthetic demonstrations that preserve expert spatial and temporal structure better than planner- or optimization-based methods. This leads to lower trajectory deviation and collision rates, and higher success when training diffusion-based visuomotor policies, as demonstrated on three manipulation tasks with increasing fidelity sensitivity using a Spot mobile manipulator.
Significance. If the results hold, the work provides a principled alternative to sampling-based or optimization-driven demonstration synthesis by treating the expert trajectory as a strong prior via DMP retargeting, which is particularly relevant for contact-rich and shape-sensitive manipulation where motion structure matters. The integration of photorealistic 3DGS rendering with continuous geometric reasoning in the obstacle term is a clear strength, as is the real-robot evaluation across tasks of varying sensitivity. This could reduce reliance on extensive real data collection while supporting better downstream imitation learning performance.
major comments (1)
- [Abstract] Abstract: The central claim that DMP retargeting 'yields phase-consistent, shape-preserving motion by construction' is load-bearing for the argument that this approach is superior for contact-rich tasks. However, standard DMP goal retargeting (fixed forcing function, shifted attractor) can alter curvature, timing, and workspace paths when new object positions change required approach geometry or contact points, even prior to applying the obstacle term; the analytic obstacle-aware formulation on the 3DGS density field does not explicitly constrain object-interaction geometry, so the 'minimal perturbation' guarantee may not hold on the targeted tasks.
minor comments (1)
- [Abstract] Abstract: The positive comparative results are stated without any quantitative metrics, baseline details, statistical tests, or references to specific tables/figures; including at least summary numbers (e.g., mean deviation, collision rates, success percentages) would strengthen the abstract.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. The major comment raises an important point about the guarantees of DMP retargeting. We address it directly below with clarifications on how our method maintains motion structure while handling new configurations.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that DMP retargeting 'yields phase-consistent, shape-preserving motion by construction' is load-bearing for the argument that this approach is superior for contact-rich tasks. However, standard DMP goal retargeting (fixed forcing function, shifted attractor) can alter curvature, timing, and workspace paths when new object positions change required approach geometry or contact points, even prior to applying the obstacle term; the analytic obstacle-aware formulation on the 3DGS density field does not explicitly constrain object-interaction geometry, so the 'minimal perturbation' guarantee may not hold on the targeted tasks.
Authors: We agree that standard DMP goal retargeting shifts the attractor and can modify absolute workspace paths. However, the fixed forcing function learned from the expert trajectory preserves the demonstrated shape, phase, and relative timing by construction, which is the key property we leverage. For new object configurations, we explicitly adjust the goal position to align with the required contact or approach geometry in the updated scene (derived from the 3DGS reconstruction), ensuring interaction points remain consistent before the obstacle term is applied. The analytic obstacle-aware formulation then adds only the minimal perturbation needed to avoid collisions with the continuous density field, without altering the core DMP dynamics. Our experiments on three Spot tasks (with increasing fidelity sensitivity) show lower trajectory deviation and higher policy success than planner-based methods, empirically supporting better structure preservation. We will revise the abstract and method section to explicitly describe the goal adjustment step for object configurations and clarify the scope of the 'minimal perturbation' guarantee. revision: partial
Circularity Check
No circularity: standard DMP retargeting and empirical validation form an independent derivation chain
full rationale
The paper models expert trajectories via DMPs, retargets them to altered goals and scenes while claiming phase-consistent shape preservation by construction of the DMP equations, and augments with an analytic obstacle term on the 3DGS density field. These steps invoke well-known DMP properties and a new but explicitly derived analytic formulation rather than fitting parameters to the target metric or reducing via self-citation. Superiority claims rest on direct robot experiments measuring deviation, collisions, and downstream policy success, which are falsifiable outside the method definition itself. No load-bearing step equates its output to its input by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Argall, Sonia Chernova, Manuela Veloso, and Brett Browning
Brenna D. Argall, Sonia Chernova, Manuela Veloso, and Brett Browning. A survey of robot learning from demonstration.Robotics and Autonomous Systems, 57 (5):469–483, 2009
2009
-
[2]
Orientation in cartesian space dynamic movement primitives
A ˇleˇs Ude, Bojan Nemec, Tadej Petri ˇc, and Jun Mori- moto. Orientation in cartesian space dynamic movement primitives. InProceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages 2997–3004, Hong Kong, China, 2014. Includes quater- nion log/exp formulation for orientation DMPs
2014
-
[3]
An invitation to imitation
Andrew Bagnell and March. An invitation to imitation
-
[4]
URL https://api.semanticscholar.org/CorpusID: 6148715
-
[5]
A method for registration of 3-d shapes.IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(2):239–256, 1992
Paul J Besl and Neil D McKay. A method for registration of 3-d shapes.IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(2):239–256, 1992
1992
-
[6]
Lawrence Yunliang Chen, Chenfeng Xu, Karthik Dhar- marajan, Muhammad Zubair Irshad, Richard Cheng, Kurt Keutzer, Masayoshi Tomizuka, Quan Vuong, and Ken Goldberg. Rovi-aug: Robot and viewpoint augmentation for cross-embodiment robot learning.arXiv preprint arXiv:2409.03403, 2024
-
[7]
Timothy Chen, Ola Shorinwa, Weijia Zeng, Joseph Bruno, Philip Dames, and Mac Schwager. Splat-nav: Safe real-time robot navigation in gaussian splatting maps. arXiv preprint arXiv:2403.02751, 2024
-
[8]
Dif- fusion policy: Visuomotor policy learning via action diffusion
Cheng Chi, Siyuan Feng, Yilun Du, Zhenjia Xu, Eric Cousineau, Benjamin Burchfiel, and Shuran Song. Dif- fusion policy: Visuomotor policy learning via action diffusion. InProceedings of Robotics: Science and Systems (RSS), 2023
2023
-
[9]
Thomas Eiband, Johanna Liebl, Christoph Willibald, and Dongheui Lee. Online task segmentation by merging symbolic and data-driven skill recognition during kines- thetic teaching.Robotics and Autonomous Systems, 162: 104367, 2023. doi: 10.1016/j.robot.2023.104367
-
[10]
Du Q. Huynh. Metrics for 3d rotations: Comparison and analysis.Journal of Mathematical Imaging and Vision, 35(2):155–164, 2009. doi: 10.1007/s10851-009-0161-2
-
[11]
Learning attractor landscapes for learning motor prim- itives
Auke Jan Ijspeert, Jun Nakanishi, and Stefan Schaal. Learning attractor landscapes for learning motor prim- itives. In Susan Becker, Sebastian Thrun, and Klaus Obermayer, editors,Advances in Neural Information Pro- cessing Systems 15 (NIPS 2002), pages 1547–1554, Cam- bridge, MA, 2003. MIT Press. URL http://www-clmc. usc.edu/publications/I/ijspeert-NIPS20...
2002
-
[12]
Auke Jan Ijspeert, Jun Nakanishi, Heiko Hoffmann, Peter Pastor, and Stefan Schaal. Dynamical movement primitives: Learning attractor models for motor behav- iors.Neural Computation, 25(2):328–373, 2013. doi: 10.1162/NECO a 00393
-
[13]
Sim-to-real via sim-to-sim: Data-efficient robotic grasp- ing via randomized-to-canonical adaptation networks
Stephen James, Edward Johns, and Andrew J Davison. Sim-to-real via sim-to-sim: Data-efficient robotic grasp- ing via randomized-to-canonical adaptation networks. In CVPR, 2019
2019
-
[14]
ACM Transactions on Graphics (TOG) , volume =
Thomas Kerbl, Grigory Sattler, Michael Rheinberger, and Gordon Wetzstein. 3D Gaussian Splatting for Real- Time Radiance Field Rendering.ACM Transactions on Graphics (Proc. SIGGRAPH), 42(4):75:1–75:14, 2023. doi: 10.1145/3592415
-
[15]
Grupen, and Andrew G
George Dimitri Konidaris, Scott Kuindersma, Roderic A. Grupen, and Andrew G. Barto. Robot learning from demonstration by constructing skill trees.The Inter- national Journal of Robotics Research, 31(3):360–375,
-
[16]
doi: 10.1177/0278364911428653
-
[17]
DDCO: Discovery of deep continuous options for robot learning from demonstrations
Sanjay Krishnan, Roy Fox, Ion Stoica, and Ken Gold- berg. DDCO: Discovery of deep continuous options for robot learning from demonstrations. InProceedings of the 1st Conference on Robot Learning (CoRL), 2017
2017
-
[18]
Robogsim: A real2sim2real robotic gaussian splatting simulator,
Xinhai Li, Jialin Li, Ziheng Zhang, Rui Zhang, Fan Jia, Tiancai Wang, Haoqiang Fan, Kuo-Kun Tseng, and Ruip- ing Wang. Robogsim: A real2sim2real robotic gaussian splatting simulator.arXiv preprint arXiv:2411.11839, 2024
-
[19]
What matters in learning from offline human demonstra- tions for robot manipulation
Ajay Mandlekar, Danfei Xu, Josiah Wong, Soroush Nasiriany, Chen Wang, Rohun Kulkarni, Li Fei-Fei, Silvio Savarese, Yuke Zhu, and Roberto Mart ´ın-Mart´ın. What matters in learning from offline human demonstra- tions for robot manipulation. InConference on Robot Learning (CoRL), 2021
2021
-
[20]
Srinivasan, Matthew Tancik, Jonathan T
Ben Mildenhall, Pratul P. Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as radiance fields for view synthesis. InEuropean Conference on Computer Vi- sion (ECCV), pages 405–421, 2020. doi: 10.1007/ 978-3-030-58452-8 24
2020
-
[21]
Konidaris, Sachin Chitta, Bhaskara Marthi, and Andrew G
Scott Niekum, Sarah Osentoski, George D. Konidaris, Sachin Chitta, Bhaskara Marthi, and Andrew G. Barto. Learning grounded finite-state representations from un- structured demonstrations.The International Journal of Robotics Research, 34(2):131–157, 2015
2015
-
[22]
One demo is worth a thousand trajectories: Action-view augmentation for visuomotor policies
Chuer Pan, Litian Liang, Dominik Bauer, Eric Cousineau, Benjamin Burchfiel, Siyuan Feng, and Shuran Song. One demo is worth a thousand trajectories: Action-view augmentation for visuomotor policies. In Conference on Robot Learning (CoRL), 2025
2025
-
[23]
Movement reproduction and obstacle avoid- ance with dynamic movement primitives and potential fields
Dae-Hyung Park, Heiko Hoffmann, Peter Pastor, and Ste- fan Schaal. Movement reproduction and obstacle avoid- ance with dynamic movement primitives and potential fields. In2008 8th IEEE-RAS International Conference on Humanoid Robots, pages 91–98, 2008
2008
-
[24]
Learning and generalization of motor skills by learning from demonstration
Peter Pastor, Heiko Hoffmann, Tamim Asfour, and Stefan Schaal. Learning and generalization of motor skills by learning from demonstration. InProceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages 763–768, Kobe, Japan, 2009
2009
-
[25]
Splat- sim: Zero-shot sim2real transfer of rgb manipulation poli- cies using gaussian splatting
M Nomaan Qureshi, Sparsh Garg, Francisco Yandun, David Held, George Kantor, and Abhisesh Silwal. Splat- sim: Zero-shot sim2real transfer of rgb manipulation poli- cies using gaussian splatting. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 6502–6509. IEEE, 2025
2025
-
[26]
Cad2rl: Real single-image flight without a single real image
Fereshteh Sadeghi and Sergey Levine. Cad2rl: Real single-image flight without a single real image. In Robotics: Science and Systems (RSS), 2016
2016
-
[27]
Dynamic programming algorithm optimization for spoken word recognition
Hiroaki Sakoe and Seibi Chiba. Dynamic programming algorithm optimization for spoken word recognition. IEEE Transactions on Acoustics, Speech, and Signal Processing, 26(1):43–49, 1978
1978
-
[28]
Dynamic movement primitives -a frame- work for motor control in humans and humanoid robotics
Stefan Schaal. Dynamic movement primitives -a frame- work for motor control in humans and humanoid robotics. In Hajime Kimura, Kazuo Tsuchiya, Akio Ishiguro, and Holk Witte, editors,Adaptive Motion of Animals and Machines, pages 261–280. Springer, Tokyo,
-
[29]
doi: 10.1007/4-431-31381-8 23
-
[30]
Domain ran- domization for transferring deep neural networks from simulation to the real world
Josh Tobin, Rachel Fong, Alex Ray, Jonas Schneider, Wojciech Zaremba, and Pieter Abbeel. Domain ran- domization for transferring deep neural networks from simulation to the real world. InIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 23–30, 2017. doi: 10.1109/IROS.2017.8202133
-
[31]
Reconciling reality through simulation: A real- to-sim-to-real approach for robust manipulation,
Marcel Torne, Anthony Simeonov, Zechu Li, April Chan, Tao Chen, Abhishek Gupta, and Pulkit Agrawal. Rec- onciling reality through simulation: A real-to-sim-to- real approach for robust manipulation.arXiv preprint arXiv:2403.03949, 2024
-
[32]
Zhengrong Xue, Shuying Deng, Zhenyang Chen, Yixuan Wang, Zhecheng Yuan, and Huazhe Xu. Demogen: Syn- thetic demonstration generation for data-efficient visuo- motor policy learning.arXiv preprint arXiv:2502.16932, 2025
-
[33]
Novel demonstration generation with gaussian splatting enables robust one-shot manipulation,
Sizhe Yang, Wenye Yu, Jia Zeng, Jun Lv, Kerui Ren, Cewu Lu, Dahua Lin, and Jiangmiao Pang. Novel demonstration generation with gaussian splatting en- ables robust one-shot manipulation.arXiv preprint arXiv:2504.13175, 2025
-
[34]
Chengbo Yuan, Suraj Joshi, Shaoting Zhu, Hang Su, Hang Zhao, and Yang Gao. Roboengine: Plug-and- play robot data augmentation with semantic robot seg- mentation and background generation.arXiv preprint arXiv:2503.18738, 2025
-
[35]
A survey of imitation learning: Al- gorithms, recent developments, and challenges.IEEE Transactions on Cybernetics, 2024
Maryam Zare, Parham M Kebria, Abbas Khosravi, and Saeid Nahavandi. A survey of imitation learning: Al- gorithms, recent developments, and challenges.IEEE Transactions on Cybernetics, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.