Cross-Polarization Fusion of VV AND VH SAR Observations for Improved Flood Mapping
Pith reviewed 2026-05-09 16:42 UTC · model grok-4.3
The pith
Fusing VV and VH SAR polarizations in a deep learning model produces more accurate flood maps than single-polarization inputs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A deep learning segmentation framework that receives fused VV and VH SAR inputs outperforms the same framework trained on VV alone or VH alone, delivering higher Intersection over Union and F1 scores and sharper flood boundaries, with the largest gains occurring in vegetated and heterogeneous regions.
What carries the argument
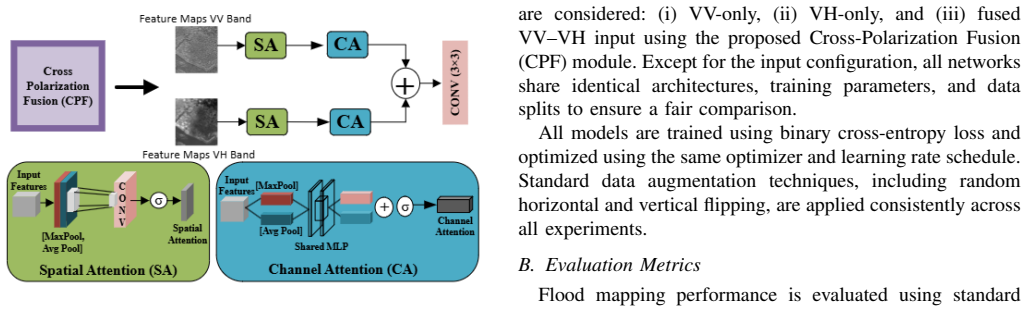
Cross-polarization fusion of VV and VH channels fed as joint input to a deep learning segmentation network that exploits complementary surface and volume scattering signals.
If this is right
- Flood boundaries become more reliable in vegetated and heterogeneous areas.
- Single-polarization SAR data alone is shown to be insufficient for complex flood scenes.
- Disaster monitoring systems gain a practical way to raise mapping accuracy without new sensors.
- Standard metrics such as IoU and F1 improve when both polarizations are used together.
Where Pith is reading between the lines
- The same fusion step could be tested on other SAR-based tasks such as crop or soil monitoring.
- Combining the fused output with optical or topographic layers might further reduce remaining errors.
- Operational flood services could adopt the dual-polarization input as a default rather than an option.
Load-bearing premise
The three model versions were trained under truly identical conditions so that measured gains reflect real complementary information from the two polarizations.
What would settle it
On a fresh, unseen flood dataset the fused VV-VH model shows no consistent IoU or F1 improvement over the better single-polarization baseline.
Figures

read the original abstract
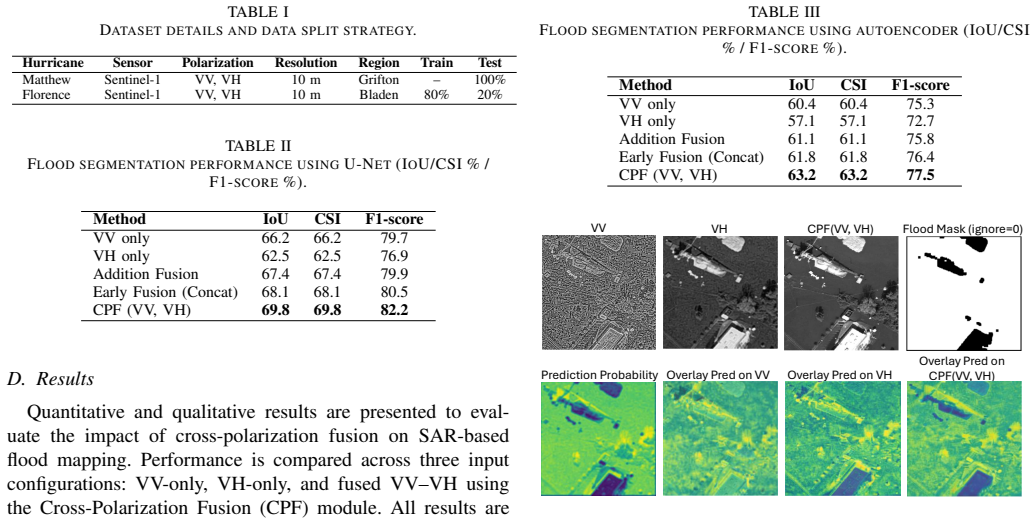
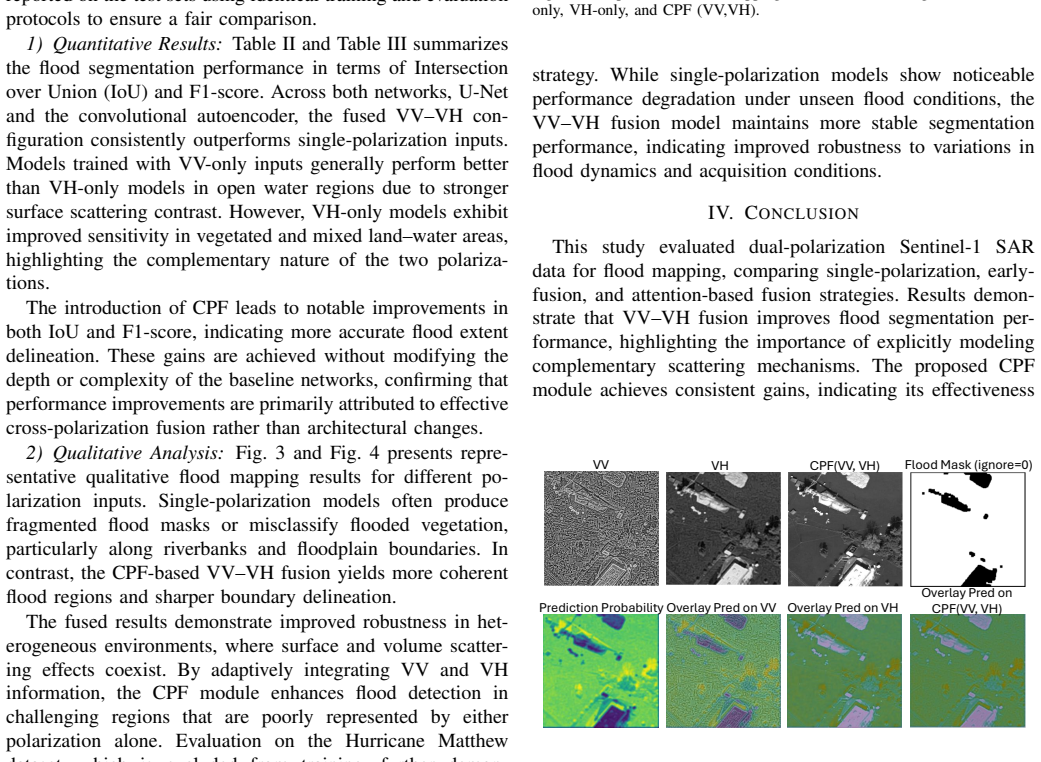
Synthetic Aperture Radar (SAR) imagery is widely used for flood monitoring due to its all-weather and day-night imaging capability. However, flood mapping using single-polarization SAR data remains challenging in complex environments where surface and volume scattering coexist. In this paper, we investigate the effectiveness of cross-polarization fusion of VV and VH SAR observations for improved flood mapping. A deep learning-based segmentation framework is employed to jointly exploit complementary information from VV and VH polarizations. To ensure a fair evaluation, three configurations are compared under identical training conditions: VV only, VH only, and fused VV-VH input. Performance is assessed using standard flood mapping metrics, including Intersection over Union (IoU) and F1-score, along with qualitative visual analysis. Experimental results demonstrate that VV-VH fusion consistently outperforms single-polarization models, particularly in vegetated and heterogeneous flood regions, leading to more accurate flood boundary delineation. The findings highlight the importance of cross-polarization SAR fusion for enhancing the reliability of SAR-based flood mapping in disaster monitoring applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript investigates cross-polarization fusion of VV and VH SAR observations for flood mapping. It employs a deep learning segmentation framework and compares three input configurations (VV-only, VH-only, and VV-VH fused) under identical training conditions, reporting that the fused input yields higher IoU and F1 scores, especially in vegetated and heterogeneous regions, with supporting qualitative analysis.
Significance. If the reported gains can be shown to arise from genuine VV-VH complementarity rather than input dimensionality effects, the work would support more reliable SAR-based flood delineation in complex environments, with potential value for operational disaster monitoring.
major comments (2)
- [Abstract and Experimental Setup] Abstract and Experimental Setup: The claim that the three configurations were trained under truly identical conditions is undermined by the fact that VV-only and VH-only inputs are single-channel while the fused VV-VH input is two-channel. In standard CNN segmentation architectures, this alters the first convolutional layer's kernel shape, parameter count, and gradient flow, which can improve performance independently of polarization synergy. No description is given of any capacity-equalizing adjustments (e.g., channel duplication for single-pol baselines or parameter-matched designs).
- [Abstract and Results] Abstract and Results: Performance gains are asserted without any dataset description (source, size, geographic diversity, or flood event coverage), training protocol details, error bars, statistical significance tests, or ablation studies isolating polarization complementarity from input tensor richness. This leaves the central claim that fusion 'jointly exploits complementary information' unsupported by verifiable evidence.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We address each major comment below and will revise the manuscript to incorporate clarifications and additional analyses where needed to strengthen the presentation of our results.
read point-by-point responses
-
Referee: [Abstract and Experimental Setup] Abstract and Experimental Setup: The claim that the three configurations were trained under truly identical conditions is undermined by the fact that VV-only and VH-only inputs are single-channel while the fused VV-VH input is two-channel. In standard CNN segmentation architectures, this alters the first convolutional layer's kernel shape, parameter count, and gradient flow, which can improve performance independently of polarization synergy. No description is given of any capacity-equalizing adjustments (e.g., channel duplication for single-pol baselines or parameter-matched designs).
Authors: We agree that the difference in input channels inherently changes the first convolutional layer and overall model capacity, and that this must be explicitly controlled to isolate any polarization complementarity. The manuscript's reference to 'identical training conditions' pertains to the shared backbone architecture, optimizer, learning rate, batch size, and training epochs across the three setups. However, no channel-duplication or parameter-matching was performed in the original experiments. In the revised manuscript, we will update the Experimental Setup section to describe the input tensor construction in detail and add a controlled ablation in which single-polarization inputs are channel-duplicated to two channels before training, allowing direct comparison of dimensionality effects versus polarization synergy. revision: yes
-
Referee: [Abstract and Results] Abstract and Results: Performance gains are asserted without any dataset description (source, size, geographic diversity, or flood event coverage), training protocol details, error bars, statistical significance tests, or ablation studies isolating polarization complementarity from input tensor richness. This leaves the central claim that fusion 'jointly exploits complementary information' unsupported by verifiable evidence.
Authors: We acknowledge that the abstract does not contain these supporting details and that the central claim requires stronger empirical backing. The full manuscript includes a dataset section describing Sentinel-1 VV/VH acquisitions from multiple flood events, but we agree it lacks sufficient quantitative characterization, reproducibility information, and statistical validation. In the revision we will expand the dataset and training protocol descriptions with explicit numbers on sample counts, geographic coverage, and event diversity; report mean and standard deviation of IoU/F1 across multiple random seeds; include paired statistical significance tests; and add dimensionality-controlled ablations to better substantiate that observed gains arise from VV-VH complementarity rather than input richness alone. revision: yes
Circularity Check
No circularity detected in empirical comparison
full rationale
The paper is a purely empirical study comparing three input configurations (VV-only, VH-only, VV-VH fused) for SAR flood mapping via deep learning segmentation. No derivation chain, equations, first-principles results, or predictions exist that could reduce to inputs by construction. No self-citations, ansatzes, uniqueness theorems, or fitted parameters renamed as predictions appear. The central claim rests on experimental metrics under stated identical training conditions, making the work self-contained without circular elements. The noted difference in input channels (1 vs 2) is an experimental design question, not a circularity issue per the defined patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- deep learning model hyperparameters and architecture choices
Reference graph
Works this paper leans on
-
[1]
J. Hidalgo and A. A. Baez, “Natural disasters,”Critical Care Clinics, vol. 35, no. 4, pp. 591–607, 2019
work page 2019
-
[2]
Global perspectives on loss of human life caused by floods,
S. N. Jonkman, “Global perspectives on loss of human life caused by floods,”Natural Hazards, vol. 34, no. 2, pp. 151–175, 2005
work page 2005
-
[3]
M. Diakakis, N. Boufidis, J. M. S. Grau, E. Andreadakis, and I. Stamos, “A systematic assessment of the effects of extreme flash floods on transportation infrastructure and circulation: The example of the 2017 mandra flood,” International Journal of Disaster Risk Reduction, vol. 47, p. 101542, 2020
work page 2017
-
[4]
J. Blay, M. Fawakherji, and L. Hashemi-Beni, “Flood impact risk mapping in settlement areas from a 3d perspective: A case study of hurricane matthew,” in Proceedings of the 2024 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). IEEE, Jul. 2024, pp. 3939–3942
work page 2024
-
[5]
M. Fawakherji and L. Hashemi-Beni, “Flood detection and mapping through multi-resolution sensor fusion: integrating uav optical imagery and satellite sar data,” Geomatics, Natural Hazards and Risk, vol. 16, no. 1, p. 2493225, 2025
work page 2025
-
[6]
An introduction to synthetic aperture radar (SAR),
Y . K. Chan and V . Koo, “An introduction to synthetic aperture radar (SAR),”Progress In Electromagnetics Research B, vol. 2, pp. 27–60, 2008
work page 2008
-
[7]
Dealing with flood mapping using SAR data in the presence of wind or heavy precipitation,
N. Pierdicca, L. Pulvirenti, and M. Chini, “Dealing with flood mapping using SAR data in the presence of wind or heavy precipitation,” inSAR Image Analysis, Modeling, and Techniques XIII, vol. 8891. SPIE, Oct. 2013, pp. 139–149
work page 2013
-
[8]
Residual wave vision U-Net for flood map- ping using dual-polarization Sentinel-1 SAR imagery,
A. Jamali, S. K. Roy, L. H. Beni, B. Pradhan, J. Li, and P. Ghamisi, “Residual wave vision U-Net for flood map- ping using dual-polarization Sentinel-1 SAR imagery,” International Journal of Applied Earth Observation and Geoinformation, vol. 127, p. 103662, 2024
work page 2024
-
[9]
X. Zhang, N. W. Chan, B. Pan, X. Ge, and H. Yang, “Mapping flood by the object-based method using backscattering coefficient and interference coherence of Sentinel-1 time series,”Science of the Total Environment, vol. 794, p. 148388, 2021
work page 2021
-
[10]
Flood map- ping in vegetated and urban areas and other challenges: Models and methods,
N. Pierdicca, L. Pulvirenti, and M. Chini, “Flood map- ping in vegetated and urban areas and other challenges: Models and methods,” inFlood Monitoring through Re- mote Sensing. Cham: Springer International Publishing, 2017, pp. 135–179
work page 2017
-
[11]
A local thresholding approach to flood water delineation using Sentinel-1 SAR imagery,
J. Liang and D. Liu, “A local thresholding approach to flood water delineation using Sentinel-1 SAR imagery,” ISPRS Journal of Photogrammetry and Remote Sensing, vol. 159, pp. 53–62, 2020
work page 2020
-
[12]
J. Lu, J. Li, G. Chen, L. Zhao, B. Xiong, and G. Kuang, “Improving pixel-based change detection accuracy using an object-based approach in multitemporal SAR flood images,”IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 8, no. 7, pp. 3486–3496, 2015
work page 2015
-
[13]
S. Martinis and C. Rieke, “Backscatter analysis using multi-temporal and multi-frequency SAR data in the context of flood mapping at river saale, germany,”Remote Sensing, vol. 7, no. 6, pp. 7732–7752, 2015
work page 2015
-
[14]
J. Zhao, M. Li, Y . Li, P. Matgen, and M. Chini, “Urban flood mapping using satellite synthetic aperture radar (SAR) data: A review of characteristics, approaches, and datasets,”IEEE Geoscience and Remote Sensing Magazine, 2024
work page 2024
-
[15]
Flood resilience through advanced wetland predic- tion,
M. Anokye, M. Fawakherji, and L. Hashemi-Beni, “Flood resilience through advanced wetland predic- tion,” inProceedings of the 2024 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). IEEE, Jul. 2024, pp. 5516–5520
work page 2024
-
[16]
A. Salem and L. Hashemi-Beni, “Inundated vegetation mapping using SAR data: A comparison of polariza- tion configurations of UA VSAR L-band and Sentinel C- band,”Remote Sensing, vol. 14, no. 24, p. 6374, 2022
work page 2022
-
[17]
Remote sensing of surface water and soil moisture,
A. Pietroniro, J. T ¨oyr¨o, R. Leconte, and G. Kite, “Remote sensing of surface water and soil moisture,” inRemote Sensing in Northern Hydrology: Measuring Environmen- tal Change. IAHS Press, 2005, vol. 163, pp. 119–142
work page 2005
-
[18]
O. Andrew, A. Apan, D. R. Paudyal, and K. Perera, “Convolutional neural network-based deep learning ap- proach for automatic flood mapping using NovaSAR- 1 and Sentinel-1 data,”ISPRS International Journal of Geo-Information, vol. 12, no. 5, p. 194, 2023
work page 2023
-
[19]
Multi-resolution data fusion for resilient flood mapping,
M. Fawakherji, M. Anokye, J. Blay, and L. Hashemi- Beni, “Multi-resolution data fusion for resilient flood mapping,”IEEE Access, vol. 13, pp. 202 275–202 294, 2025
work page 2025
-
[20]
Near real-time flood inundation prediction using Sentinel-1 imagery and deep learning,
N. Mohamadiazar, A. Ebrahimian, and H. Hosseiny, “Near real-time flood inundation prediction using Sentinel-1 imagery and deep learning,” inProceedings of the World Environmental and Water Resources Congress 2024, 2024, pp. 824–834
work page 2024
-
[21]
Scattering and polarization properties of water clouds and hazes in the visible and infrared,
D. Deirmendjian, “Scattering and polarization properties of water clouds and hazes in the visible and infrared,” Applied Optics, vol. 3, no. 2, pp. 187–196, 1964
work page 1964
-
[22]
High-precision flood mapping from Sentinel- 1 dual-polarization SAR data,
Y . Qin, X. Yin, Y . Li, Q. Xu, L. Zhang, P. Mao, and X. Jiang, “High-precision flood mapping from Sentinel- 1 dual-polarization SAR data,”IEEE Transactions on Geoscience and Remote Sensing, 2025
work page 2025
-
[23]
M. Fawakherji, J. Blay, M. Anokye, L. Hashemi-Beni, and J. Dorton, “DeepFlood: An inundated vegetation high-resolution dataset for accurate flood mapping and segmentation,”Scientific Data, vol. 12, no. 1, p. 271, 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.