Recognition: 2 theorem links
Manifold-Aligned Guided Integrated Gradients for Reliable Feature Attribution
Pith reviewed 2026-05-08 19:04 UTC · model grok-4.3
The pith
By constructing attribution paths in a variational autoencoder's latent space, MA-GIG produces more faithful feature attributions than standard path-based methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MA-GIG constructs attribution paths by interpolating in the latent space of a pre-trained variational autoencoder and decoding intermediate latent states to input space. This biases the path toward the learned generative manifold and reduces exposure to implausible regions with noisy gradients. Aggregating gradients along these manifold-aligned paths produces explanations that are more faithful to the model's predictions on features proximal to the input and outperforms prior path-based methods across datasets and classifiers.
What carries the argument
The manifold-aligned integration path, created by latent-space interpolation in a variational autoencoder followed by decoding to input space, which ensures gradient aggregations occur on plausible data points near the input.
Load-bearing premise
A pre-trained variational autoencoder must accurately capture the data manifold so that decoded latent-space paths yield gradient aggregations more faithful than those from input-space paths.
What would settle it
If quantitative faithfulness metrics on a dataset with high VAE reconstruction error show MA-GIG underperforming standard Guided Integrated Gradients, the claim that manifold alignment improves attributions would be falsified.
Figures









read the original abstract
Feature attribution is central to diagnosing and trusting deep neural networks, and Integrated Gradients (IG) is widely used due to its axiomatic properties. However, IG can yield unreliable explanations when the integration path between a baseline and the input passes through regions with noisy gradients. While Guided Integrated Gradients reduces this sensitivity by adaptively updating low-gradient-magnitude features, input-space guidance still produces intermediate inputs that deviate from the data manifold. To address this limitation, we propose \emph{Manifold-Aligned Guided Integrated Gradients} (MA-GIG), which constructs attribution paths in the latent space of a pre-trained variational autoencoder. By decoding intermediate latent states, MA-GIG biases the path toward the learned generative manifold and reduces exposure to implausible input-space regions. Through qualitative and quantitative evaluations, we demonstrate that MA-GIG produces faithful explanations by aggregating gradients on path features proximal to the input. Consequently, our method reduces off-manifold noise and outperforms prior path-based attribution methods across multiple datasets and classifiers. Our code is available at https://github.com/leekwoon/ma-gig/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Manifold-Aligned Guided Integrated Gradients (MA-GIG), an extension of Integrated Gradients (IG) that constructs attribution paths by interpolating in the latent space of a pre-trained variational autoencoder (VAE) and decoding the points back to input space. This is intended to bias paths toward the learned data manifold, reducing exposure to off-manifold regions with noisy gradients compared to standard input-space straight-line paths or Guided IG. The authors report qualitative visualizations and quantitative metrics showing improved faithfulness and outperformance over prior path-based attribution methods on multiple datasets and classifiers, with code released at the provided GitHub link.
Significance. If the central claim holds, the method offers a practical way to improve the reliability of axiomatic feature attributions by leveraging generative models for path construction. This addresses a recognized weakness of IG variants in high-dimensional data where straight-line paths often traverse low-density regions. The open-source code is a clear strength for reproducibility. However, the significance is tempered by the dependence on VAE quality, which is not yet shown to be robust across varying manifold approximations.
major comments (2)
- [§3] §3 (Method, latent-space path construction): The assertion that decoded latent interpolations yield gradients 'proximal to the input' and reduce off-manifold noise is load-bearing for the faithfulness claim, yet no metric (e.g., reconstruction error, density estimation, or gradient-norm comparison on vs. off manifold) is reported to quantify how faithfully the VAE manifold approximates the true data distribution on the evaluation sets.
- [§4] §4 (Experiments, quantitative results): The reported outperformance over baselines is presented as evidence of reduced off-manifold noise, but the evaluation lacks an ablation on VAE fidelity (different architectures, training regimes, or reconstruction PSNR/SSIM on test data). Without this, it remains possible that gains arise from the specific VAE rather than a general manifold-alignment benefit, undermining the generalizability claim.
minor comments (2)
- [Abstract / §3] The phrasing 'aggregating gradients on path features proximal to the input' in the abstract and §3 could be made more precise by defining 'proximal' in terms of a distance or density threshold.
- [Figures] Figure captions and axis labels in the qualitative results could explicitly state the VAE architecture and latent dimension used, to aid replication.
Simulated Author's Rebuttal
Thank you for the constructive feedback on our manuscript. We address each major comment point by point below, agreeing where the concerns are valid and outlining specific revisions to strengthen the presentation of our claims.
read point-by-point responses
-
Referee: [§3] §3 (Method, latent-space path construction): The assertion that decoded latent interpolations yield gradients 'proximal to the input' and reduce off-manifold noise is load-bearing for the faithfulness claim, yet no metric (e.g., reconstruction error, density estimation, or gradient-norm comparison on vs. off manifold) is reported to quantify how faithfully the VAE manifold approximates the true data distribution on the evaluation sets.
Authors: We agree that direct metrics quantifying VAE manifold fidelity would make the central claim more robust. In the revised manuscript we will report reconstruction errors (MSE) on the test sets for all datasets and include a brief comparison of gradient norms for decoded vs. straight-line path points. These additions will provide explicit evidence that decoded points remain closer to the data distribution. revision: yes
-
Referee: [§4] §4 (Experiments, quantitative results): The reported outperformance over baselines is presented as evidence of reduced off-manifold noise, but the evaluation lacks an ablation on VAE fidelity (different architectures, training regimes, or reconstruction PSNR/SSIM on test data). Without this, it remains possible that gains arise from the specific VAE rather than a general manifold-alignment benefit, undermining the generalizability claim.
Authors: The referee correctly identifies a gap in demonstrating that the benefit is due to manifold alignment in general rather than the particular VAE chosen. We will add an ablation study in the revision that varies VAE training duration and latent dimension on one dataset, reports the resulting reconstruction quality, and shows the corresponding change in MA-GIG faithfulness scores. This will directly link attribution performance to manifold approximation quality. revision: yes
Circularity Check
No circularity: algorithmic construction with external VAE and empirical validation
full rationale
The paper presents MA-GIG as an algorithmic modification to Integrated Gradients that interpolates in the latent space of a separately pre-trained VAE, decodes points, and aggregates gradients along the resulting path. No equations, derivations, or self-citations are supplied that reduce the claimed reduction in off-manifold noise or the reported performance gains to a quantity defined by the method's own fitted parameters or prior outputs. The central claim rests on the external VAE manifold approximation plus qualitative/quantitative evaluations on multiple datasets, which are independent of any self-referential loop. This is a standard proposal of a new heuristic with external dependencies and benchmarks, not a closed derivation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A pre-trained variational autoencoder accurately models the underlying data manifold.
Reference graph
Works this paper leans on
-
[1]
Beyond single path in- tegrated gradients for reliable input attribution via ran- domized path sampling
Jeon, G., Jeong, H., and Choi, J. Beyond single path in- tegrated gradients for reliable input attribution via ran- domized path sampling. InProceedings of the IEEE/CVF International Conference on Computer Vision, pp. 2052– 2061,
2052
-
[2]
Landing with the score: Riemannian optimization through denoising, 2025
Kharitenko, A., Shen, Z., de Santi, R., He, N., and Doerfler, F. Landing with the score: Riemannian optimization through denoising.arXiv preprint arXiv:2509.23357,
-
[3]
Kingma, D. P. and Welling, M. Auto-encoding variational bayes.arXiv preprint arXiv:1312.6114,
-
[4]
Lee, K. and Choi, J. Local manifold approximation and projection for manifold-aware diffusion planning.arXiv preprint arXiv:2506.00867, 2025a. Lee, K. and Choi, J. State-covering trajectory stitching for diffusion planners. InAdvances in Neural Information Processing Systems (NeurIPS), 2025b. Lee, K., Lee, K., Lee, H., and Shin, J. A simple unified framew...
-
[5]
Lee, K., Kim, S., and Choi, J. Adaptive and explainable deployment of navigation skills via hierarchical deep re- inforcement learning.arXiv preprint arXiv:2305.19746, 2023a. Lee, K., Kim, S., and Choi, J. Refining diffusion planner for reliable behavior synthesis by automatic detection of infeasible plans. InAdvances in Neural Information Processing Syst...
-
[6]
Kandinsky: an improved text-to-image synthesis with image prior and latent diffusion,
Razzhigaev, A., Shakhmatov, A., Maltseva, A., Arkhip- kin, V ., Pavlov, I., Ryabov, I., Kuts, A., Panchenko, A., Kuznetsov, A., and Dimitrov, D. Kandinsky: an improved text-to-image synthesis with image prior and latent diffu- sion.arXiv preprint arXiv:2310.03502,
-
[7]
Not just a black box: Learning important features through propagating activation differences, 2017
Shrikumar, A., Greenside, P., Shcherbina, A., and Kundaje, A. Not just a black box: Learning important features through propagating activation differences.arXiv preprint arXiv:1605.01713,
-
[8]
Deep Inside Convolutional Networks: Visualising Image Classification Models and Saliency Maps
Simonyan, K., Vedaldi, A., and Zisserman, A. Deep in- side convolutional networks: Visualising image clas- sification models and saliency maps.arXiv preprint arXiv:1312.6034,
-
[9]
Zhang, B., Zheng, W., Zhou, J., and Lu, J
URL https://proceedings.mlr.press/ v235/zaher24a.html. Zhang, B., Zheng, W., Zhou, J., and Lu, J. Path choice mat- ters for clear attribution in path methods.arXiv preprint arXiv:2401.10442,
-
[10]
ISSN 1939-3539. doi: 10.1109/TPAMI.2024. 3388092. 12 Manifold-Aligned Guided Integrated Gradients for Reliable Feature Attribution Appendix Table of Contents Appendix A.Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 Appen...
-
[11]
17 Manifold-Aligned Guided Integrated Gradients for Reliable Feature Attribution Aggregated Score.The final scalar metric is obtained by integrating the DiffID curve over the perturbation range: DiffID= Z 1 0 ψ(x, δ)dδ.(31) A higher DiffID score indicates a more faithful attribution map, distinguishing salient features from irrelevant ones more effectivel...
2012
-
[12]
based on unCLIP architecture. Unlike the SD family, it utilizes mCLIP for embeddings and employs a MoVQGAN decoder for latent reconstruction. It is trained on large-scale datasets including LAION HighRes and fine-tuned on high-quality internal datasets. We use the kandinsky-community/kandinsky-2-1checkpoint. F.3. Baselines Here we describe the specific im...
-
[13]
0.1996 0.2861 0.0866 AGI (Pan et al.,
1996
-
[14]
Method MPRT (↑) G×I (Shrikumar et al., 2016)−0.005 IG (Sundararajan et al.,
0.2532 0.32120.0680 MA-GIG 0.2670 0.3429 0.0760 Table 7.Efficient MPRT sanity check on Ima- geNet with ResNet18. Method MPRT (↑) G×I (Shrikumar et al., 2016)−0.005 IG (Sundararajan et al.,
-
[15]
0.073 IG2 (Zhuo & Ge, 2024)−0.063 AGI (Pan et al., 2021)−0.066 EIG (Jha et al.,
2024
-
[16]
0.013 MIG (Zaher et al., 2024)−0.003 GIG (Kapishnikov et al.,
2024
-
[17]
MA-GIG preserves the ranking observed in the main evaluation and achieves the best DiffID and Insertion AUC
0.308 MA-GIG 0.625 Large-scale ImageNet evaluation.To verify that the ImageNet results are not an artifact of the 500-image subset, we additionally evaluate 5,000 ImageNet validation images using ResNet18. MA-GIG preserves the ranking observed in the main evaluation and achieves the best DiffID and Insertion AUC. Model-randomization sanity check.We evalua...
2016
-
[18]
0.2384 0.4378 0.1994 0.4060 0.5174 0.1114 0.2255 0.3940 0.1685 IG (Sundararajan et al.,
1994
-
[19]
0.3634 0.5093 0.1459 0.5556 0.58890.03330.3586 0.4880 0.1294 MA-GIG (SD1) 0.4255 0.5550 0.1294 0.5745 0.6547 0.0802 0.4033 0.5147 0.1114 MA-GIG (SD1, w/ Slerp) 0.4387 0.5652 0.1264 0.5985 0.6751 0.0766 0.3937 0.5042 0.1105 MA-GIG (SD2) 0.4495 0.5697 0.1201 0.5901 0.6601 0.0700 0.4075 0.5213 0.1138 MA-GIG (SD2, w/ Slerp) 0.4474 0.5739 0.12640.6171 0.69790....
-
[20]
0.1222 0.2338 0.1116 0.2784 0.3576 0.0791 0.2000 0.2813 0.0813 IG (Sundararajan et al.,
2000
-
[21]
0.0193 0.1713 0.1520 0.2224 0.3304 0.1080 0.0816 0.2053 0.1238 AGI (Pan et al.,
2053
-
[22]
0.0136 0.1569 0.1433 0.1402 0.2682 0.1280 0.0787 0.1947 0.1160 EIG (Jha et al.,
1947
-
[23]
0.1891 0.27200.08290.2542 0.3424 0.0882 0.2551 0.3282 0.0731 MA-GIG (SD1) 0.2249 0.3240 0.0991 0.3367 0.4109 0.0742 0.3067 0.3800 0.0733 MA-GIG (SD1, w/ Slerp) 0.2009 0.3064 0.1056 0.3333 0.4131 0.0798 0.2884 0.3638 0.0753 MA-GIG (SD2) 0.2324 0.3253 0.0929 0.3429 0.4191 0.0762 0.3073 0.3756 0.0682 MA-GIG (SD2, w/ Slerp) 0.1933 0.2998 0.1064 0.3404 0.4196 ...
-
[24]
0.1358 0.2507 0.1149 0.2469 0.3222 0.0753 0.2020 0.3138 0.1118 IG2 (Zhuo & Ge,
2020
-
[25]
0.1447 0.2507 0.1060 0.2242 0.3040 0.0798 0.2067 0.2993 0.0927 EIG (Jha et al.,
2067
-
[26]
0.1327 0.2467 0.1140 0.2436 0.3222 0.0787 0.1942 0.3013 0.1071 MIG (Zaher et al.,
1942
-
[27]
0.2536 0.3304 0.0769 0.2842 0.33670.05240.2771 0.3667 0.0896 MA-GIG (SD1) 0.2467 0.3333 0.0867 0.3247 0.3869 0.0622 0.3020 0.3871 0.0851 MA-GIG (SD1, w/ Slerp) 0.2542 0.3382 0.0840 0.3329 0.3933 0.0604 0.3118 0.3893 0.0776 MA-GIG (SD2) 0.2598 0.3409 0.0811 0.3284 0.3900 0.0616 0.3082 0.3838 0.0756 MA-GIG (SD2, w/ Slerp) 0.26380.34780.08400.3429 0.39820.05...
-
[28]
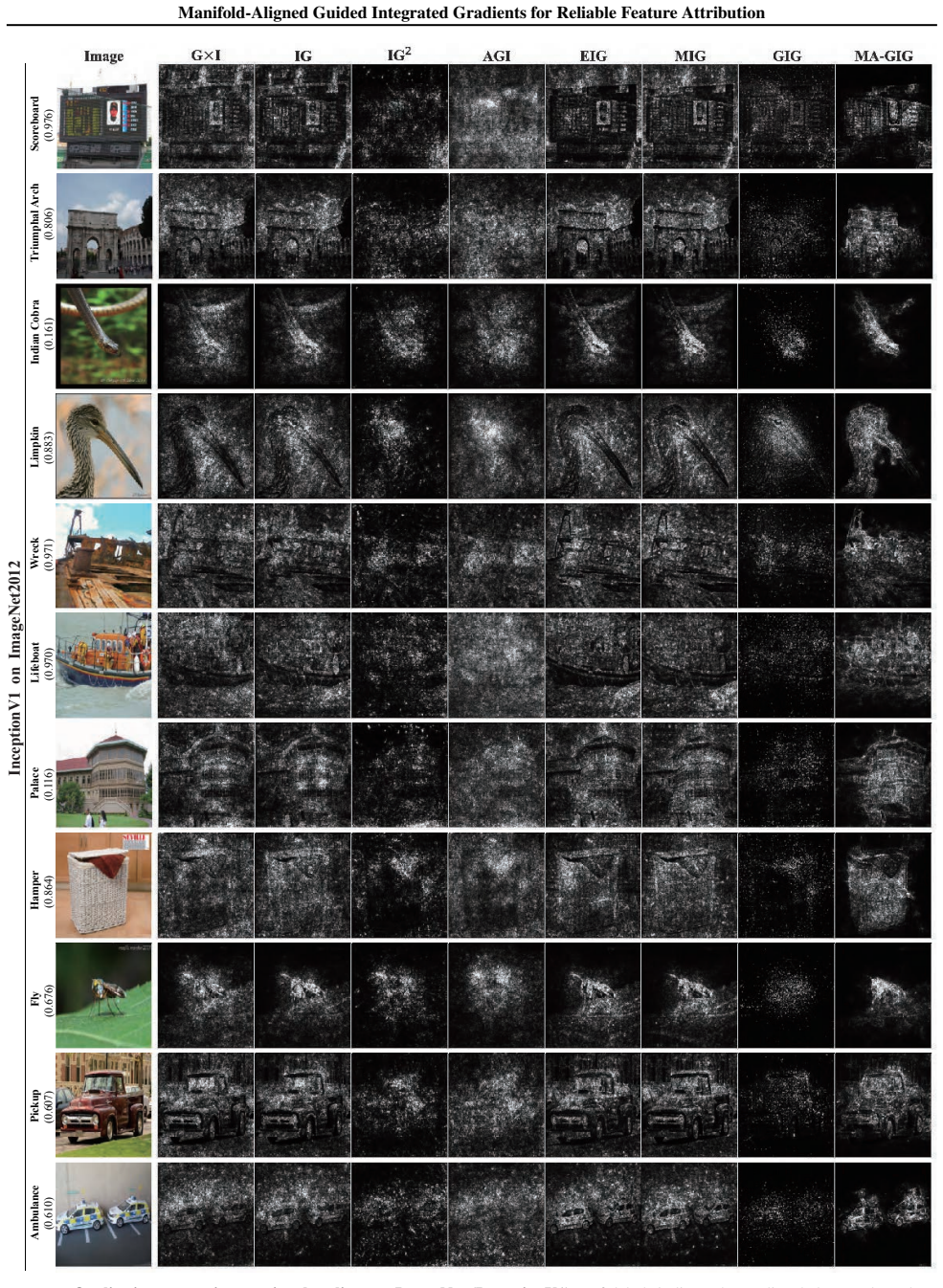
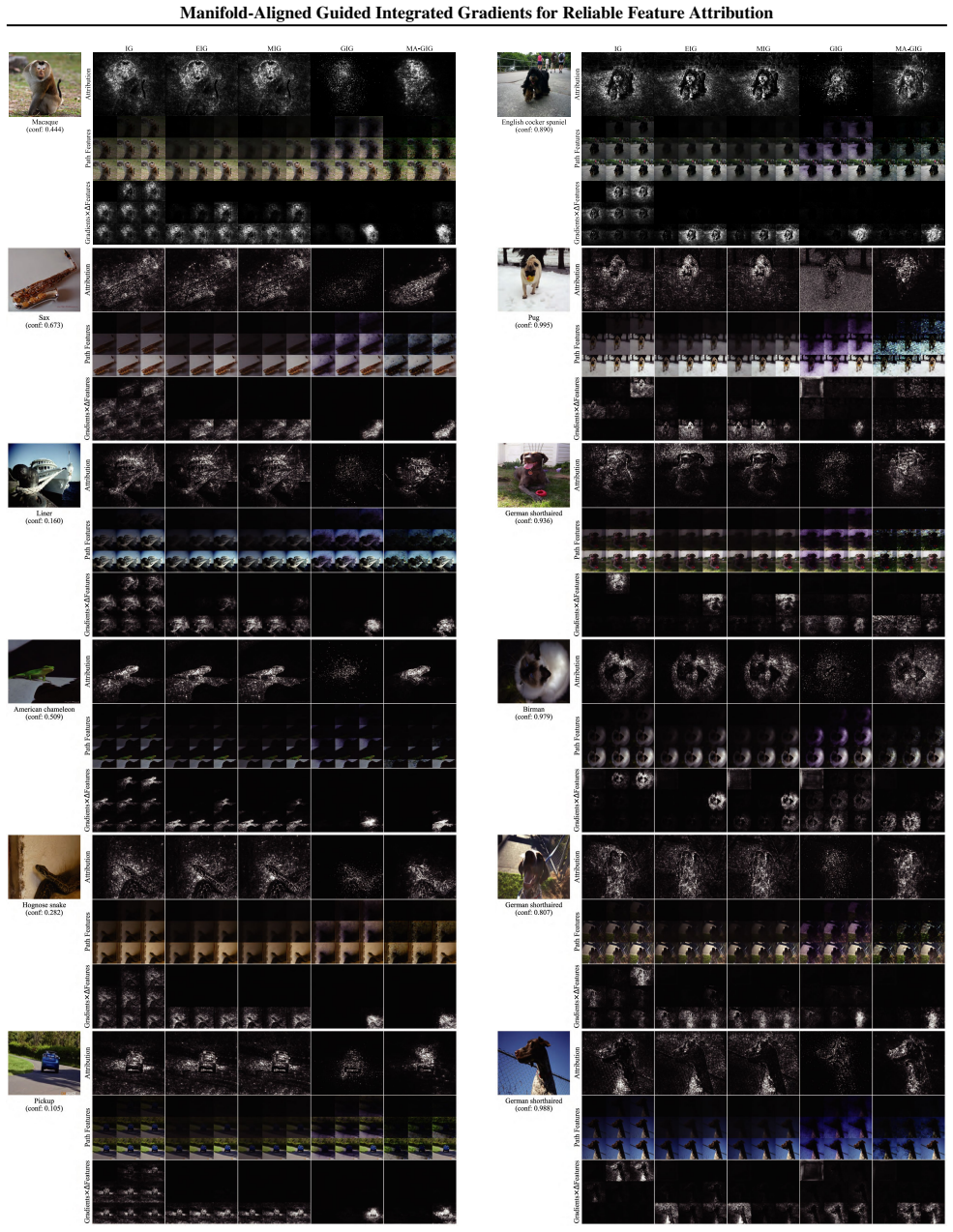
The visualized intermediate steps (second and third rows in each panel) provide empirical evidence for the reliability of our framework
These visualizations cover various classifiers on the ImageNet2012, Oxford-IIIT Pet, and Oxford 102 Flower datasets. The visualized intermediate steps (second and third rows in each panel) provide empirical evidence for the reliability of our framework. First, regarding gradient behavior, pixel-space guidance methods like GIG often suffer from manifold de...
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.