Recognition: unknown
Mixture Prototype Flow Matching for Open-Set Supervised Anomaly Detection
Pith reviewed 2026-05-14 20:57 UTC · model grok-4.3
The pith
Mixture Prototype Flow Matching models the velocity field as a Gaussian mixture prior to capture multi-modality in normal data for open-set anomaly detection.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MPFM learns a continuous transformation from normal feature distributions to a structured Gaussian mixture prototype space by explicitly modeling the velocity field as a Gaussian mixture prior where each component corresponds to a distinct normal class. This design facilitates mode-aware and semantically coherent distribution transport. A Mutual Information Maximization Regularizer is added to prevent prototype collapse and maximize normal-anomaly separability.
What carries the argument
The mixture velocity field in flow matching, with each Gaussian component corresponding to a distinct normal class.
Load-bearing premise
Normal data inherently exhibits multi-modality that is best captured by a Gaussian mixture in prototype space.
What would settle it
A controlled test on a dataset with clearly separated normal classes where replacing the mixture velocity field with a single Gaussian yields equal or higher anomaly detection scores would falsify the central claim.
Figures

read the original abstract
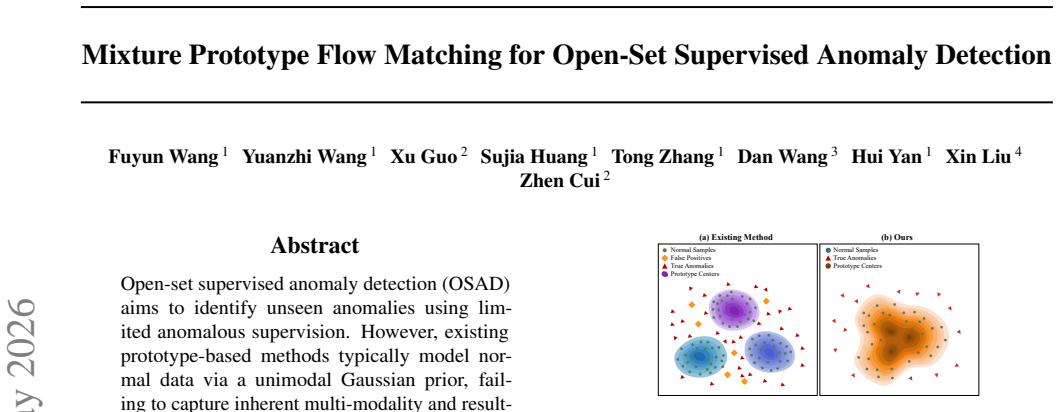
Open-set supervised anomaly detection (OSAD) aims to identify unseen anomalies using limited anomalous supervision. However, existing prototype-based methods typically model normal data via a unimodal Gaussian prior, failing to capture inherent multi-modality and resulting in blurred decision boundaries. To address this, we propose Mixture Prototype Flow Matching (MPFM), a framework that learns a continuous transformation from normal feature distributions to a structured Gaussian mixture prototype space. Departing from traditional flow-based approaches that rely on a single velocity vector, MPFM explicitly models the velocity field as a Gaussian mixture prior where each component corresponds to a distinct normal class. This design facilitates mode-aware and semantically coherent distribution transport. Furthermore, we introduce a Mutual Information Maximization Regularizer (MIMR) to prevent prototype collapse and maximize normal-anomaly separability. Extensive experiments demonstrate that MPFM achieves state-of-the-art performance across diverse benchmarks under both single- and multi-anomaly settings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Mixture Prototype Flow Matching (MPFM) for open-set supervised anomaly detection. It replaces the unimodal Gaussian prior used in existing prototype-based methods with a velocity field explicitly modeled as a Gaussian mixture prior (one component per normal class) to transport normal features to a structured prototype space. A Mutual Information Maximization Regularizer (MIMR) is introduced to avoid prototype collapse. The abstract claims state-of-the-art results on diverse benchmarks under both single- and multi-anomaly settings.
Significance. If the mixture velocity field can be shown to induce a valid probability path whose marginals match the normal feature distribution at t=0 and the target Gaussian mixture at t=1 without mode collapse, the approach would address a genuine limitation of unimodal prototypes in multi-modal normal data. Reproducible code and clear ablation isolating the mixture velocity from MIMR would strengthen the contribution to flow-matching methods for anomaly detection.
major comments (2)
- [Abstract and §3] Abstract and §3 (Method): the statement that modeling the velocity field directly as a Gaussian mixture prior “facilitates mode-aware and semantically coherent distribution transport” is not supported by a derivation showing that the chosen v_t(x) satisfies the continuity equation for the required marginals p_0 (normal features) and p_1 (structured mixture). No path construction (linear interpolation, OT, or otherwise) is specified, so it is unclear whether the integrated ODE remains measure-preserving or avoids boundary blurring.
- [§4] §4 (Experiments): the SOTA claims are presented without ablations that isolate the mixture velocity field from the MIMR regularizer, without error bars or statistical significance tests across runs, and without analysis of failure cases (e.g., mode collapse on particular datasets). This leaves open whether performance gains are attributable to the central modeling choice.
minor comments (2)
- [§3] Notation: define the precise parameterization of the mixture velocity field (weights, means, covariances) and how they are learned or fixed.
- [Figures] Figure clarity: ensure that any velocity-field or transport visualizations include both source normal features and target prototypes so readers can assess mode preservation.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the theoretical foundations and experimental rigor of our work. We address each major comment point by point below.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (Method): the statement that modeling the velocity field directly as a Gaussian mixture prior “facilitates mode-aware and semantically coherent distribution transport” is not supported by a derivation showing that the chosen v_t(x) satisfies the continuity equation for the required marginals p_0 (normal features) and p_1 (structured mixture). No path construction (linear interpolation, OT, or otherwise) is specified, so it is unclear whether the integrated ODE remains measure-preserving or avoids boundary blurring.
Authors: We acknowledge that an explicit derivation would strengthen the presentation. In the flow-matching framework used in the manuscript, the velocity field is defined as a mixture v_t(x) = ∑_k π_k v_t^k(x) where each conditional velocity v_t^k follows the standard linear interpolation path between samples from the normal feature distribution and the corresponding prototype component. By the properties of conditional flow matching, this construction satisfies the continuity equation for the marginals p_0 and p_1. In the revised manuscript we will add a dedicated paragraph in §3 deriving the marginal probability path and confirming measure preservation under the mixture velocity field. revision: yes
-
Referee: [§4] §4 (Experiments): the SOTA claims are presented without ablations that isolate the mixture velocity field from the MIMR regularizer, without error bars or statistical significance tests across runs, and without analysis of failure cases (e.g., mode collapse on particular datasets). This leaves open whether performance gains are attributable to the central modeling choice.
Authors: We agree that isolating the contribution of the mixture velocity field is essential. The revised experimental section will include: (i) ablations that replace the mixture velocity with a unimodal Gaussian velocity while keeping MIMR, and vice versa; (ii) mean and standard deviation over five independent runs together with paired t-test significance results against the strongest baseline; and (iii) a short failure-case subsection discussing datasets where prototype collapse was observed and how MIMR mitigates it. These additions will be placed in §4 and the supplementary material. revision: yes
Circularity Check
No significant circularity: modeling choice and regularizer are independent design decisions
full rationale
The paper presents the mixture velocity field as an explicit modeling ansatz (Gaussian mixture prior per normal class) and introduces MIMR as a separate regularizer to prevent collapse. These are framed as design choices to capture multi-modality, not derived from or equivalent to fitted inputs, self-citations, or prior results by the same authors. No equations reduce the velocity field construction or transport claims to tautologies. Performance is validated empirically on external benchmarks rather than by construction. This is the common case of a self-contained empirical modeling paper.
Axiom & Free-Parameter Ledger
free parameters (1)
- number of mixture components
axioms (1)
- domain assumption Normal feature distributions are multi-modal and can be represented by a Gaussian mixture in prototype space
invented entities (2)
-
Mixture velocity field
no independent evidence
-
Mutual Information Maximization Regularizer (MIMR)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Gaussian mixture flow matching models.arXiv preprint arXiv:2504.05304,
Chen, H., Zhang, K., Tan, H., Xu, Z., Luan, F., Guibas, L., Wetzstein, G., and Bi, S. Gaussian mixture flow matching models.arXiv preprint arXiv:2504.05304,
-
[2]
Crafting papers on machine learning
Langley, P. Crafting papers on machine learning. In Langley, P. (ed.),Proceedings of the 17th International Conference on Machine Learning (ICML 2000), pp. 1207–1216, Stan- ford, CA,
2000
-
[3]
Flow Matching for Generative Modeling
Lipman, Y ., Chen, R. T., Ben-Hamu, H., Nickel, M., and Le, M. Flow matching for generative modeling.arXiv preprint arXiv:2210.02747,
work page internal anchor Pith review Pith/arXiv arXiv
-
[4]
Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow
9 Submission and Formatting Instructions for ICML 2026 Liu, X., Gong, C., and Liu, Q. Flow straight and fast: Learning to generate and transfer data with rectified flow. arXiv preprint arXiv:2209.03003,
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[5]
Decoupled Weight Decay Regularization
Loshchilov, I. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101,
work page internal anchor Pith review Pith/arXiv arXiv
- [6]
-
[7]
Anomaly-Preference Image Generation
Wang, F., Zhang, T., Wang, Y ., Qiu, Y ., Liu, X., Guo, X., and Cui, Z. Distribution prototype diffusion learning for open-set supervised anomaly detection. InProceedings of the Computer Vision and Pattern Recognition Conference, pp. 20416–20426, 2025a. Wang, F., Zhang, T., Wang, Y ., Zhang, X., Liu, X., and Cui, Z. Scene graph-grounded image generation. ...
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
Yao, X., Li, R., Qian, Z., Wang, L., and Zhang, C. Hierarchi- cal gaussian mixture normalizing flow modeling for uni- fied anomaly detection.arXiv preprint arXiv:2403.13349,
-
[9]
Dataset Statistics We evaluate our approach through extensive experiments on nine real-world anomaly detection datasets
10 Submission and Formatting Instructions for ICML 2026 A. Dataset Statistics We evaluate our approach through extensive experiments on nine real-world anomaly detection datasets. Key statistics of all datasets are summarized in Tab
2026
-
[10]
For MVTec AD, we adopt its original data split for normal samples
Our experimental setup follows established protocols from prior open-set supervised anomaly detection (OSAD) literature. For MVTec AD, we adopt its original data split for normal samples. For the remaining eight datasets, normal samples are randomly divided into training and testing sets with a ratio of 3:1. Table 5.Summary statistics of the nine real-wor...
2021
-
[11]
It consists of four main categories and 23 subclasses
is a large-scale, open-access gastrointestinal imaging dataset collected from real endoscopy and colonoscopy examinations. It consists of four main categories and 23 subclasses. We focus on 11 Submission and Formatting Instructions for ICML 2026 endoscopic images, where anatomical landmark categories are treated as normal samples and pathological categori...
2026
-
[12]
Table 6.AUC performance (mean ± std) across nine real-world AD datasets is reported under the general setting
is an intracranial hemorrhage detection dataset based on head computed tomography (CT) scans. Table 6.AUC performance (mean ± std) across nine real-world AD datasets is reported under the general setting. red highlights the best results, and blue indicates sub-optimal outcomes. All baseline SOTA results are sourced from the original papers (Ding et al., 2...
2022
-
[13]
(44) Substituting Eqn
=N zt−∆t;c 1zt +c 2z0, c 3I , (43) with coefficients determined by the schedule: c1 = σ2 t−∆t σ2 t αt αt−∆t , c 2 = βt,∆t σ2 t αt−∆t, c 3 = βt,∆t σ2 t σ2 t−∆t. (44) Substituting Eqn. (43) and the mixture posterior Eqn. (38) into Eqn. (42), and using the fact that the convolution of a Gaussian and a Gaussian mixture remains a Gaussian mixture, we obtain: q...
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.