Recognition: unknown
Programming sequential deployment of origami via kinematic transition fronts
Pith reviewed 2026-05-08 17:02 UTC · model grok-4.3
The pith
Asymmetric coupling between adjacent creases in origami strips produces nonlinear recurrence relations that generically admit heteroclinic orbits connecting developed and flat-folded states.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Asymmetric coupling between adjacent creases produces nonlinear recurrence relations whose composition generically gives rise to heteroclinic orbits connecting developed and flat-folded states, enabling domino-like sequential deployment. Macroscopic shape can be programmed independently of propagation behavior by exploiting invariances in the recurrence relation. The approach is illustrated through a representative thick-panel origami prototype.
What carries the argument
Heteroclinic orbits arising from the composition of nonlinear recurrence relations generated by asymmetric coupling of degree-4 origami vertices.
If this is right
- Sequential, domino-style deployment becomes programmable in flat-foldable origami strips solely through geometric coupling design.
- The overall deployed or folded shape of the strip can be chosen independently of the front propagation speed or direction.
- The same recurrence framework applies to thick-panel realizations without requiring elastic instabilities.
- Kinematic fronts can be initiated from either end or from interior seeds by appropriate choice of boundary conditions on the recurrence.
Where Pith is reading between the lines
- The same recurrence construction may extend to non-strip topologies such as cylinders or tori if the local vertex rules can be embedded consistently.
- The existence of heteroclinic orbits suggests that small perturbations in crease stiffness or panel thickness could be used to tune front speed without destroying the sequential behavior.
- Because the method is purely kinematic, it may combine with other actuation schemes to produce hybrid systems that switch between sequential and simultaneous deployment modes.
Load-bearing premise
The kinematic transition fronts observed in physical origami strips correspond to heteroclinic orbits in the discrete dynamical system defined by the recurrence relations from crease couplings.
What would settle it
Numerical integration or closed-form solution of the composed recurrence map for a chosen asymmetric coupling that fails to produce any orbit connecting the fully developed state to the fully flat-folded state.
Figures

read the original abstract
Propagating transition fronts, in which local interactions sequentially trigger state changes, are widely observed across natural, biological, and engineered systems. While such propagation has been engineered using energy-driven instabilities, front propagation governed purely by geometric constraints remains underexplored and lacks a general design framework. In particular, how to program sequential deployment in origami through such kinematic propagation remains an open challenge. Here, we develop a systematic design framework for kinematic transition fronts based on their correspondence with heteroclinic orbits in discrete dynamical systems. Focusing on strips of developable and flat-foldable degree-4 origami vertices, we show that asymmetric coupling between adjacent creases produces nonlinear recurrence relations whose composition generically gives rise to heteroclinic orbits connecting developed and flat-folded states, enabling domino-like sequential deployment. We further show that macroscopic shape can be programmed independently of propagation behavior by exploiting invariances in the recurrence relation, and illustrate the approach through a representative thick-panel origami prototype. These results enable programmable sequential deployment in origami via transition fronts, while also establishing a general framework for kinematic transition fronts in geometrically constrained systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a systematic framework for programming sequential deployment in origami via kinematic transition fronts. Focusing on strips of developable, flat-foldable degree-4 vertices, it shows that asymmetric coupling between adjacent creases yields nonlinear recurrence relations whose iterates generically admit heteroclinic orbits connecting the fully developed and flat-folded fixed points. This correspondence enables domino-like propagation. The framework further exploits invariances in the recurrence to program macroscopic shape independently of the propagation dynamics, and the approach is illustrated with a thick-panel physical prototype.
Significance. If the central correspondence holds, the work provides a purely geometric, parameter-light design method for controlling front propagation in constrained systems, distinct from energy-driven mechanisms. The dynamical-systems mapping offers a generalizable tool for origami and similar mechanisms, with the separation of shape and propagation programming being a notable strength. The prototype supplies concrete validation. Credit is due for grounding the claims in explicit recurrence relations and for demonstrating applicability beyond the mathematical model.
major comments (2)
- [§3] §3 (Recurrence relations and heteroclinic orbits): The claim that asymmetric coupling 'generically' produces heteroclinic orbits connecting the developed and flat-folded states is load-bearing for the entire framework. The manuscript should state the precise theorem (including any genericity conditions on the coupling parameters) and provide the key steps showing that the composition of the nonlinear maps admits such orbits; without this, the central design principle remains a plausible but unverified assertion.
- [§5] §5 (Prototype validation): The thick-panel prototype is presented as confirmation, yet the text does not report quantitative metrics (e.g., measured vs. predicted front speed, deviation from the ideal kinematic trajectory, or sensitivity to panel thickness). These data are necessary to assess whether the idealized recurrence model remains predictive once panel thickness and joint compliance are introduced.
minor comments (3)
- [§2] The notation for the crease angles and coupling coefficients should be introduced with a single consolidated table or diagram at the beginning of the mathematical section to avoid repeated redefinition.
- [Figure 4] Figure captions for the prototype should explicitly label the locations of asymmetric couplings and the observed propagation direction to allow direct comparison with the recurrence diagram.
- [§4] A brief remark on the robustness of the heteroclinic connection under small random perturbations of the coupling strengths would be useful for practical design.
Simulated Author's Rebuttal
We thank the referee for the careful reading, positive assessment of the work, and recommendation for minor revision. We address each major comment below and have revised the manuscript accordingly to improve clarity and validation.
read point-by-point responses
-
Referee: [§3] §3 (Recurrence relations and heteroclinic orbits): The claim that asymmetric coupling 'generically' produces heteroclinic orbits connecting the developed and flat-folded states is load-bearing for the entire framework. The manuscript should state the precise theorem (including any genericity conditions on the coupling parameters) and provide the key steps showing that the composition of the nonlinear maps admits such orbits; without this, the central design principle remains a plausible but unverified assertion.
Authors: We agree that an explicit theorem statement will make the central result more rigorous and accessible. In the revised manuscript we will add Theorem 3.1 in §3, which states the precise genericity conditions on the coupling parameters (specifically, that the asymmetry ratio lies in an open dense subset of (0,1) excluding a countable set of rational values that produce periodic orbits) and asserts the existence of the heteroclinic orbit for the composition of the two nonlinear maps. The proof sketch will include the key steps already underlying the analysis: (i) derivation of the strictly monotonic recurrence maps from the spherical trigonometry of the degree-4 vertex, (ii) verification that the maps are invertible and that their composition sends the interval of admissible angles into itself while fixing the developed and flat-folded endpoints, and (iii) application of the intermediate-value theorem to the difference between the iterate and the identity to guarantee a connecting orbit. This formalization will confirm that the correspondence is not merely plausible but follows directly from the kinematic constraints. revision: yes
-
Referee: [§5] §5 (Prototype validation): The thick-panel prototype is presented as confirmation, yet the text does not report quantitative metrics (e.g., measured vs. predicted front speed, deviation from the ideal kinematic trajectory, or sensitivity to panel thickness). These data are necessary to assess whether the idealized recurrence model remains predictive once panel thickness and joint compliance are introduced.
Authors: We acknowledge that quantitative metrics are needed to evaluate how well the idealized recurrence model holds under physical conditions. In the revised §5 we will add a dedicated paragraph reporting the following measurements obtained from the existing thick-panel prototype: the observed average front propagation speed compared with the value predicted by the recurrence relation, the maximum and RMS deviation of measured crease angles from the kinematic trajectory, and the dependence of sequential deployment on panel thickness (tested across the range used in fabrication). These additions will directly address the predictive accuracy of the model when panel thickness and joint compliance are present. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper derives nonlinear recurrence relations directly from asymmetric coupling of adjacent creases in degree-4 origami vertices, then shows that iterates of these relations generically produce heteroclinic orbits connecting the developed and flat-folded states. This correspondence is presented as the core modeling step that enables the design framework for kinematic transition fronts, with no evidence in the abstract or extracted claims of self-definitional loops, fitted parameters renamed as predictions, or load-bearing self-citations. The recurrence relations arise from geometric constraints on developable and flat-foldable vertices, and the heteroclinic existence is asserted as a generic property of the resulting discrete dynamical system rather than an imported uniqueness theorem or ansatz. The overall chain therefore remains independent of its target result.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Strips consist of developable and flat-foldable degree-4 origami vertices
Reference graph
Works this paper leans on
-
[1]
Nadkarni, C
N. Nadkarni, C. Daraio, and D. M. Kochmann, Dynam- ics of periodic mechanical structures containing bistable elastic elements: From elastic to solitary wave propaga- tion, Physical Review E90, 023204 (2014)
2014
-
[2]
J. R. Raney, N. Nadkarni, C. Daraio, D. M. Kochmann, J. A. Lewis, and K. Bertoldi, Stable propagation of me- chanical signals in soft media using stored elastic energy, Proceedings of the National Academy of Sciences113, 9722 (2016)
2016
-
[3]
Leybaert and M
L. Leybaert and M. J. Sanderson, Intercellular Ca 2+ waves: Mechanisms and function, Physiological Reviews 92, 1359 (2012)
2012
-
[4]
Goriely and T
A. Goriely and T. McMillen, Spontaneous helix hand re- versal and tendril perversion in climbing plants, Pyisical Review Letters80, 1564 (1998)
1998
-
[5]
McMillen and A
T. McMillen and A. Goriely, Tendril perversion in intrin- sically curved rods, Journal of Nonlinear Science12, 241 (2002)
2002
-
[6]
Gardner, A playing-card soliton, The Physics Teacher 40, 229 (2002)
M. Gardner, A playing-card soliton, The Physics Teacher 40, 229 (2002)
2002
-
[7]
D. M. Kochmann and K. Bertoldi, Exploiting microstruc- tural instabilities in solids and structures: from metama- terials to structural transitions, Applied mechanics re- views69, 050801 (2017)
2017
-
[8]
B. Deng, J. R. Raney, K. Bertoldi, and V. Tournat, Non- linear waves in flexible mechanical metamaterials, Jour- nal of Applied Physics130, 040901 (2021)
2021
-
[9]
Veenstra, O
J. Veenstra, O. Gamayun, X. Guo, A. Sarvi, C. V. Mein- ersen, and C. Coulais, Non-reciprocal topological solitons in active metamaterials, Nature627, 528 (2024)
2024
-
[10]
Janbaz and C
S. Janbaz and C. Coulais, Diffusive kinks turn kirigami into machines, Nature Communications15, 1255 (2024)
2024
-
[11]
Nadkarni, A
N. Nadkarni, A. F. Arrieta, C. Chong, D. M. Kochmann, and C. Daraio, Unidirectional transition waves in bistable lattices, Physical Review Letters116, 244501 (2016)
2016
-
[12]
L. Jin, R. Khajehtourian, J. Mueller, A. Rafsanjani, V. Tournat, K. Bertoldi, and D. M. Kochmann, Guided transition waves in multistable mechanical metamateri- als, Proceedings of the National Academy of Sciences 117, 2319 (2020)
2020
-
[13]
Zareei, B
A. Zareei, B. Deng, and K. Bertoldi, Harnessing transi- tion waves to realize deployable structures, Proceedings of the National Academy of Sciences117, 4015 (2020)
2020
-
[14]
Yasuda, L
H. Yasuda, L. Korpas, and J. Raney, Transition waves and formation of domain walls in multistable mechani- cal metamaterials, Physical Review Applied13, 054067 (2020)
2020
-
[15]
C. L. Kane and T. C. Lubensky, Topological boundary modes in isostatic lattices, Nature Physics10, 39 (2014)
2014
-
[16]
B. G.-g. Chen, N. Upadhyaya, and V. Vitelli, Nonlinear conduction via solitons in a topological mechanical insu- lator, Proceedings of the National Academy of Sciences 111, 13004 (2014)
2014
-
[17]
Lubensky, C
T. Lubensky, C. Kane, X. Mao, A. Souslov, and K. Sun, Phonons and elasticity in critically coordinated lattices, Reports on Progress in Physics78, 073901 (2015)
2015
-
[18]
B. G.-g. Chen, B. Liu, A. A. Evans, J. Paulose, I. Co- hen, V. Vitelli, and C. Santangelo, Topological mechan- ics of origami and kirigami, Physical Review Letters116, 135501 (2016)
2016
-
[19]
D. Z. Rocklin, S. Zhou, K. Sun, and X. Mao, Trans- formable topological mechanical metamaterials, Nature 10 communications8, 14201 (2017)
2017
-
[20]
Mao and T
X. Mao and T. C. Lubensky, Maxwell lattices and topo- logical mechanics, Annual Review of Condensed Matter Physics9, 413 (2018)
2018
-
[21]
Y. Liu, B. Shaw, M. D. Dickey, and J. Genzer, Sequen- tial self-folding of polymer sheets, Science Advances3, e1602417 (2017)
2017
-
[22]
Tachi, Generalization of rigid-foldable quadrilateral- mesh origami, Journal of the International Association for Shell and Spatial Structures50, 173 (2009)
T. Tachi, Generalization of rigid-foldable quadrilateral- mesh origami, Journal of the International Association for Shell and Spatial Structures50, 173 (2009)
2009
-
[23]
Tachi, One-dof rigid foldable structures from space curves, inProceedings of the IABSE-IASS Symposium 2011(2011) pp
T. Tachi, One-dof rigid foldable structures from space curves, inProceedings of the IABSE-IASS Symposium 2011(2011) pp. 20–23
2011
-
[24]
R. J. Lang,Twists, tilings, and tessellations: mathe- matical methods for geometric origami(AK Peters/CRC Press, New York, US, 2017)
2017
-
[25]
T. C. Hull,Origametry: mathematical methods in paper folding(Cambridge University Press, Cambridge, UK, 2020)
2020
-
[26]
W. K. Schief, A. I. Bobenko, and T. Hoffmann, On the integrability of infinitesimal and finite deformations of polyhedral surfaces, inDiscrete differential geometry, edited by A. I. Bobenko, J. M. Sullivan, P. Schr¨ oder, and G. M. Ziegler (Birkh¨ auser Basel, 2008) pp. 67–93
2008
-
[27]
Stachel, A kinematic approach to kokotsakis meshes, Computer Aided Geometric Design27, 428 (2010)
H. Stachel, A kinematic approach to kokotsakis meshes, Computer Aided Geometric Design27, 428 (2010)
2010
-
[28]
Izmestiev, Classification of flexible kokotsakis polyhe- dra with quadrangular base, International Mathematics Research Notices2017, 715 (2017)
I. Izmestiev, Classification of flexible kokotsakis polyhe- dra with quadrangular base, International Mathematics Research Notices2017, 715 (2017)
2017
-
[29]
Sharifmoghaddam, R
K. Sharifmoghaddam, R. Maleczek, and G. Nawratil, Generalizing rigid-foldable tubular structures of t-hedral type, Mechanics Research Communications132, 104151 (2023)
2023
-
[30]
Z. He, K. Hayakawa, and M. Ohsaki, Infinitely refinable generalization of quad-mesh rigid origami: from linear and equimodular couplings, Journal of Mechanisms and Robotics18, 031004 (2026)
2026
-
[31]
Schenk and S
M. Schenk and S. D. Guest, Geometry of miura-folded metamaterials, Proceedings of the National Academy of Sciences110, 3276 (2013)
2013
-
[32]
E. T. Filipov, T. Tachi, and G. H. Paulino, Origami tubes assembled into stiff, yet reconfigurable structures and metamaterials, Proceedings of the National Academy of Sciences112, 12321 (2015)
2015
-
[33]
P. P. Pratapa, K. Liu, and G. H. Paulino, Geometric mechanics of origami patterns exhibiting poisson’s ra- tio switch by breaking mountain and valley assignment, Physical Review Letters122, 155501 (2019)
2019
-
[34]
L. H. Dudte, G. P. Choi, and L. Mahadevan, An additive algorithm for origami design, Proceedings of the National Academy of Sciences118, e2019241118 (2021)
2021
-
[35]
Imada, A
R. Imada, A. Adachi, S. Terashima, E. Iwase, and T. Tachi, Kinematic folding propagation in degree-4 origami strips, Extreme Mechanics Letters77, 102337 (2025)
2025
-
[36]
Imada and T
R. Imada and T. Tachi, Maxwell origami tube, Physical Review Research7, 013032 (2025)
2025
-
[37]
Imada and T
R. Imada and T. Tachi, Geometry and kinematics of cylindrical waterbomb tessellation, Journal of Mecha- nisms and Robotics14, 041009 (2022)
2022
-
[38]
Imada and T
R. Imada and T. Tachi, Undulations in tubular origami tessellations: A connection to area-preserving maps, Chaos33, 083158 (2023)
2023
-
[39]
Imada, T
R. Imada, T. C. Hull, J. S. Ku, and T. Tachi, Nonlinear kinematics of recursive origami inspired by the Spidron, inOrigami8: Proceedings of the 8th International Meet- ing on Origami in Science, Mathematics, and Educa- tion (8OSME), edited by G. Lu, Z. You, and M. Assis (Springer, Singapore, 2026)
2026
-
[40]
J. Z. Kim, Z. Lu, A. S. Blevins, and D. S. Bassett, Non- linear dynamics and chaos in conformational changes of mechanical metamaterials, Physical Review X12, 011042 (2022)
2022
-
[41]
Y. Zhou, B. G.-g. Chen, N. Upadhyaya, and V. Vitelli, Kink-antikink asymmetry and impurity interactions in topological mechanical chains, Physical Review E95, 022202 (2017)
2017
-
[42]
Foschi, T
R. Foschi, T. C. Hull, and J. S. Ku, Explicit kinematic equations for degree-4 rigid origami vertices, Euclidean and non-Euclidean, Physical Review E106, 055001 (2022)
2022
-
[43]
T. A. Evans, R. J. Lang, S. P. Magleby, and L. L. Howell, Rigidly foldable origami twists, inOrigami 6: Proceedings of the 6th International Meeting on Origami in Science, Mathematics, and Education, Vol. I. Mathematics, edited by K. Miura, T. Kawasaki, T. Tachi, R. Uehara, R. J. Lang, and P. Wang-Iverson (American Mathematical So- ciety, 2015) pp. 119–130
2015
-
[44]
T. A. Evans, R. J. Lang, S. P. Magleby, and L. L. Howell, Rigidly foldable origami gadgets and tessellations, Royal Society open science2, 150067 (2015)
2015
-
[45]
Tachi and T
T. Tachi and T. C. Hull, Self-foldability of rigid origami, Journal of Mechanisms and Robotics9, 021008 (2017)
2017
-
[46]
Hoberman, Reversibly expandable three-dimensional structure (1988)
C. Hoberman, Reversibly expandable three-dimensional structure (1988)
1988
-
[47]
Y. Chen, R. Peng, and Z. You, Origami of thick panels, Science349, 396 (2015)
2015
-
[48]
R. J. Lang, K. A. Tolman, E. B. Crampton, S. P. Magleby, and L. L. Howell, A review of thickness- accommodation techniques in origami-inspired engineer- ing, Applied Mechanics Reviews70, 010805 (2018)
2018
-
[49]
Zhang and Y
X. Zhang and Y. Chen, Mobile assemblies of bennett link- ages from four-crease origami patterns, Proceedings of the Royal Society A: Mathematical, Physical and Engi- neering Sciences474, 20170621 (2018). 11 Appendix A: Computation and Visualization of Folded Configurations We describe how the folded configurations of the strips shown in Figs. 3 and 4 in t...
2018
-
[50]
(1) in the main text
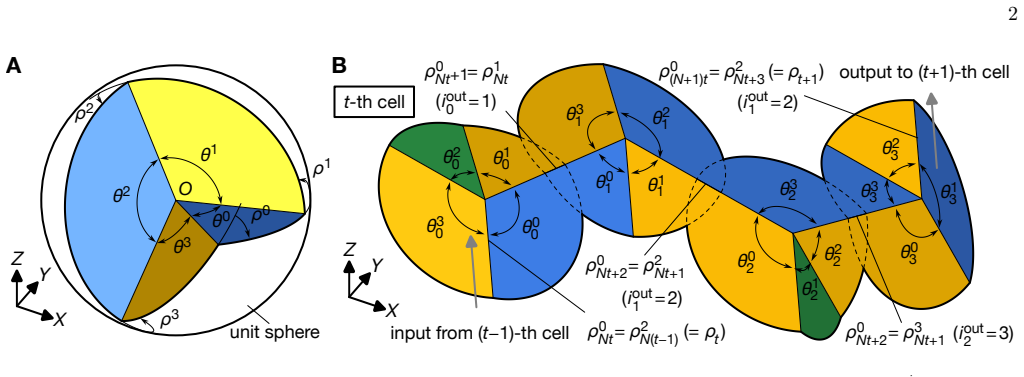
Vertex configuration The folded state of a degree-4 vertex with sector angles (θ i)i=0,1,2,3 can be determined by specifying the fold angle ρ0 and computing the remaining fold angles (ρ i)i=1,2,3 according to Eq. (1) in the main text. However, to specify its spatial configuration in three-dimensional space, both position and orientation must be defined. H...
-
[51]
We also assign the crease lengths at then-th vertex as (l i n)i=0,1,2,3 wherel i n ∈R >0; from the connectivity between adjacent vertices, these satisfyl 0 n+1 =l iout 0 n
Strip configuration Next, we consider the configuration of a strip specified by the sequence of sector angles and output-crease indices, ((θi n)i=0,1,2,3 , iout n )n=0,1,.... We also assign the crease lengths at then-th vertex as (l i n)i=0,1,2,3 wherel i n ∈R >0; from the connectivity between adjacent vertices, these satisfyl 0 n+1 =l iout 0 n . The fold...
-
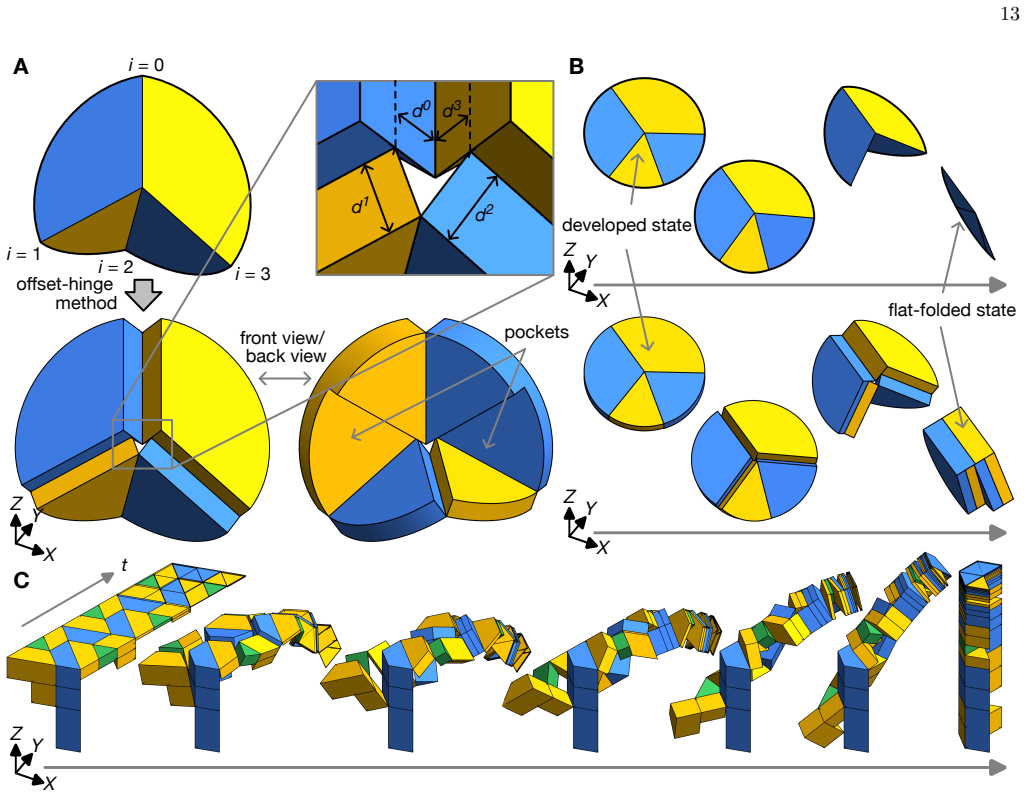
[52]
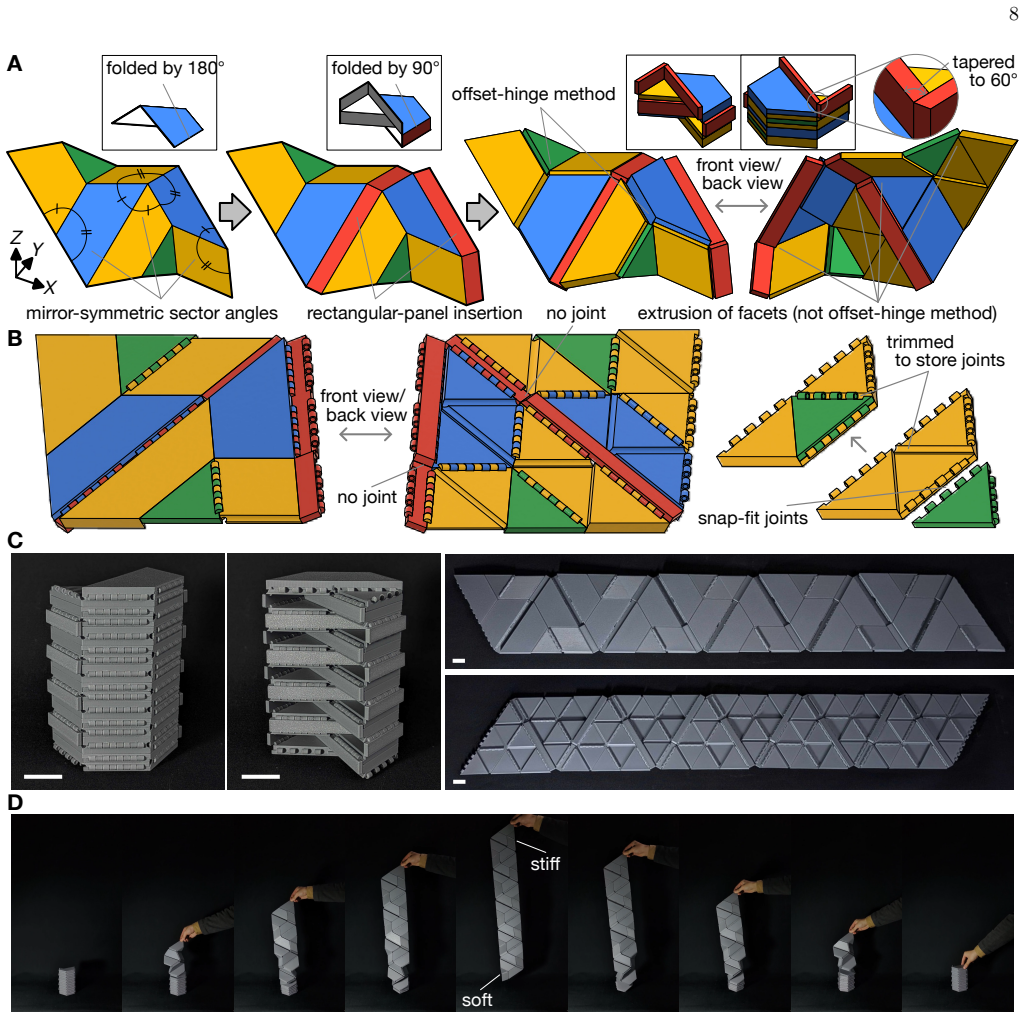
Introduction to offset-hinge method Following previous work [47], we introduce the offset-hinge method. Fig. 6(A) and (B) show an example of applying the offset-hinge method to a degree-4 vertex. Focusing on the relative heights of the hinges in the developed state, the valley crease lies at the highest position, the mountain crease opposite to it lies at...
-
[53]
3(F) in the main text, the repre- sentative link lengths at each vertex, (l 0 n)n=0,1,..., serve as the design parameters
Exponential change of panel-thickness along the strip When the offset-hinge method is applied to each vertex of the strip shown in Fig. 3(F) in the main text, the repre- sentative link lengths at each vertex, (l 0 n)n=0,1,..., serve as the design parameters. In structures such as quadrilateral meshes, where internal vertices form loops, the link lengths m...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.