Recognition: unknown
Absolute Stability of Nonlinear Negative Imaginary Systems with Application to Potential Energy Shaping
Pith reviewed 2026-05-08 06:41 UTC · model grok-4.3
The pith
Nonlinear negative imaginary systems preserve their property and achieve absolute stability under gradient nonlinear feedback if the composite storage function remains positive definite.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
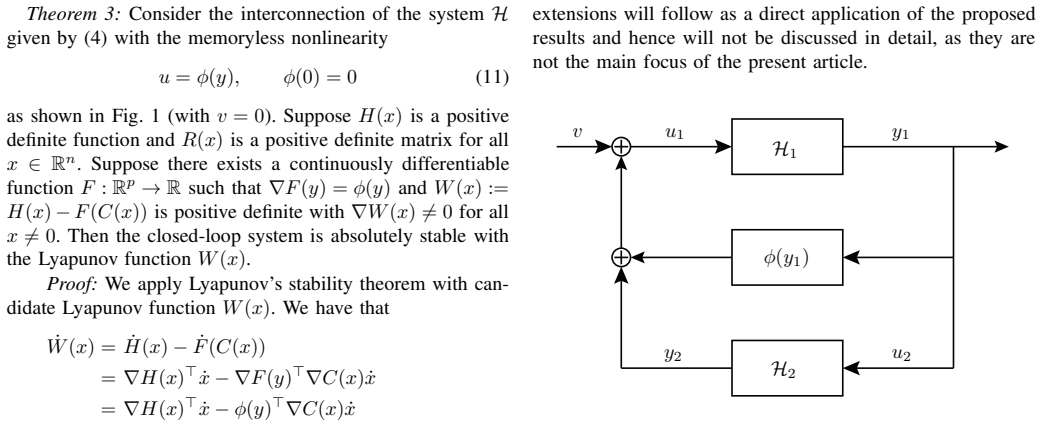
The paper claims that the negative imaginary property is preserved when the feedback nonlinearity can be expressed as the gradient of a continuously differentiable function and the composite storage function of the resulting system remains positive definite. This condition supplies a direct connection between nonlinear static feedback and storage-function shaping along the measured output channels. Absolute stability conditions for the closed-loop system are then derived under mild assumptions. The linear specialization strictly generalizes prior absolute stability results for linear NI systems by allowing coupled nonlinearities not covered by existing slope-restricted or sector-bounded fram
What carries the argument
The negative imaginary property, preserved under gradient interconnection of the feedback nonlinearity with the system output, together with the positive-definiteness requirement on the composite storage function.
If this is right
- The closed-loop system is absolutely stable under the stated gradient and positive-storage conditions.
- Linear NI absolute stability extends to coupled nonlinearities beyond slope or sector restrictions.
- The framework directly supports potential energy shaping along measured outputs.
- Stability holds without requiring every nonlinearity to satisfy slope or sector bounds.
Where Pith is reading between the lines
- The same gradient-preservation argument may compose with multiple NI subsystems while retaining stability.
- Designers could choose the potential explicitly to place equilibria at desired locations.
- The structure parallels passivity-based control and might combine with it for larger networks.
Load-bearing premise
The feedback nonlinearity must be the gradient of a continuously differentiable function and the composite storage function must remain positive definite.
What would settle it
A concrete nonlinear NI system in feedback with a non-gradient nonlinearity that remains stable, or a gradient nonlinearity whose composite storage fails to be positive definite yet the closed loop is unstable.
Figures



read the original abstract
This paper establishes absolute stability conditions for nonlinear negative imaginary (NI) systems interconnected with static nonlinear feedback. We first show that the NI property is preserved when the feedback nonlinearity can be expressed as the gradient of a continuously differentiable function, and the composite storage of the resulting system remains positive definite. This condition provides a direct connection between nonlinear static feedback and storage-function shaping along the measured output channels. Building on this result, conditions are derived for absolute stability of the closed-loop system under mild assumptions. The linear specialization of the results strictly generalizes prior absolute stability results for linear NI systems, allowing coupled nonlinearities not covered by existing slope-restricted or sector-bounded frameworks. Finally, the proposed theory is illustrated through a linear example highlighting this generalization and a nonlinear example that shows the utility of the proposed results in potential energy shaping.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript establishes absolute stability conditions for nonlinear negative-imaginary (NI) systems under static nonlinear feedback. It first proves that the NI property is preserved when the feedback nonlinearity is the gradient of a continuously differentiable function and the composite storage function (sum of the plant storage function and the potential associated with the nonlinearity) remains positive definite. Building on this preservation result, the paper derives absolute-stability conditions for the closed-loop system. The linear specialization is shown to strictly generalize prior absolute-stability results for linear NI systems by accommodating coupled nonlinearities outside existing slope-restricted or sector-bounded frameworks. The theory is illustrated by a linear example demonstrating the generalization and a nonlinear example illustrating its use in potential-energy shaping.
Significance. If the central claims hold, the work is significant for control theory because it directly links nonlinear static feedback to storage-function shaping along measured outputs in the NI setting, thereby extending absolute-stability analysis beyond classical sector or slope restrictions. The explicit connection to potential-energy shaping offers a constructive route for mechanical-system design. The linear specialization supplies a concrete generalization of existing NI absolute-stability theorems, and the two examples provide immediate evidence of applicability.
major comments (2)
- [§3] §3 (preservation of the NI property): The central claim that the closed-loop system remains NI rests on the composite storage function V(x) + Φ(y) being positive definite. No general criterion, Lyapunov-function construction, or sufficient condition is supplied to verify this property for arbitrary gradient nonlinearities; the result is therefore conditional on an assumption whose validity must be checked case-by-case. Without such a check the subsequent absolute-stability theorems do not apply.
- [§4] §4 (absolute-stability conditions): The derived LMI-type stability criteria inherit the same composite-storage hypothesis. Because no counter-example analysis or boundary case is examined where the sum fails to be positive definite, it is unclear how restrictive the hypothesis is and whether the claimed generalization over slope-restricted frameworks remains valid when the hypothesis is only marginally satisfied.
minor comments (2)
- [§3] Notation for the composite storage function is introduced without an explicit equation number; adding a numbered display would improve traceability when the same expression is reused in the stability theorems.
- [§5.1] The linear example in §5.1 cites a prior NI absolute-stability result but does not state the precise theorem number or equation from the reference; a direct citation would clarify the claimed generalization.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the positive evaluation of the significance of our work. We address the major comments point by point as follows.
read point-by-point responses
-
Referee: [§3] §3 (preservation of the NI property): The central claim that the closed-loop system remains NI rests on the composite storage function V(x) + Φ(y) being positive definite. No general criterion, Lyapunov-function construction, or sufficient condition is supplied to verify this property for arbitrary gradient nonlinearities; the result is therefore conditional on an assumption whose validity must be checked case-by-case. Without such a check the subsequent absolute-stability theorems do not apply.
Authors: We agree that the preservation result is conditional on the positive definiteness of the composite storage function. This is a fundamental requirement for the NI property to hold for the closed-loop system and is explicitly part of the theorem. No general criterion is supplied for arbitrary nonlinearities because any such criterion would depend on the particular choice of V and Φ, which are problem-specific. The condition is to be verified case-by-case, as is typical in nonlinear systems theory, and our examples show how it can be satisfied in practice. The absolute-stability results apply when this holds, and we do not believe a general construction is needed or possible without further assumptions. revision: no
-
Referee: [§4] §4 (absolute-stability conditions): The derived LMI-type stability criteria inherit the same composite-storage hypothesis. Because no counter-example analysis or boundary case is examined where the sum fails to be positive definite, it is unclear how restrictive the hypothesis is and whether the claimed generalization over slope-restricted frameworks remains valid when the hypothesis is only marginally satisfied.
Authors: The stability criteria are conditional on the same hypothesis to ensure the closed-loop NI property. This makes the results applicable precisely when the composite storage is positive definite, which is a mild condition in energy-based designs like potential shaping. In the linear case, it is easily checked. We did not analyze cases where it fails because those are outside the scope of the theorems; the generalization holds under the hypothesis, as shown by the example that goes beyond slope-restricted cases. The restrictiveness is thus not a limitation but a precise statement of when the results apply. revision: no
Circularity Check
Derivation is self-contained from NI definitions and gradient feedback
full rationale
The paper begins from the standard definition of negative imaginary systems and proves preservation of the NI property when feedback is the gradient of a C¹ function provided the composite storage function (plant storage plus potential) remains positive definite. Absolute stability conditions are then derived from this preservation result under mild assumptions. No step reduces by construction to a fitted parameter, self-citation, or renamed input; the composite-storage hypothesis is an explicit assumption whose verification is left to the user rather than smuggled in. No self-citation is load-bearing for the central claim, and the linear specialization is shown to generalize prior results without circularity.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Feedback nonlinearity is the gradient of a continuously differentiable function
- domain assumption Composite storage function remains positive definite
Reference graph
Works this paper leans on
-
[1]
Stability robustness of a f eedback interconnection of systems with negative imaginary freque ncy response,
A. Lanzon and I. R. Petersen, “Stability robustness of a f eedback interconnection of systems with negative imaginary freque ncy response,” IEEE Transactions on Automatic Control , vol. 53, no. 4, pp. 1042–1046, 2008
2008
-
[2]
Feedback control of negati ve-imaginary systems,
I. R. Petersen and A. Lanzon, “Feedback control of negati ve-imaginary systems,” IEEE Control Systems Magazine , vol. 30, no. 5, pp. 54–72, 2010
2010
-
[3]
Fast scanning using piezo electric tube nanopositioners: A negative imaginary approach,
B. Bhikkaji and S. Moheimani, “Fast scanning using piezo electric tube nanopositioners: A negative imaginary approach,” in 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatr onics. IEEE, 2009, pp. 274–279
2009
-
[4]
Multivariable n egative- imaginary controller design for damping and cross coupling reduction of nanopositioners: a reference model matching approach,
S. K. Das, H. R. Pota, and I. R. Petersen, “Multivariable n egative- imaginary controller design for damping and cross coupling reduction of nanopositioners: a reference model matching approach,” IEEE/ASME Transactions on Mechatronics , vol. 20, no. 6, pp. 3123–3134, 2015
2015
-
[5]
A negat ive imaginary approach to modeling and control of a collocated structure,
B. Bhikkaji, S. R. Moheimani, and I. R. Petersen, “A negat ive imaginary approach to modeling and control of a collocated structure, ” IEEE/ASME Transactions on Mechatronics , vol. 17, no. 4, pp. 717–727, 2011
2011
-
[6]
Design and implementation of feedback resonance compensator in ha rd disk drive servo system: A mixed passivity, negative-imaginary and small- gain approach in discrete time,
M. A. Rahman, A. Al Mamun, K. Y ao, and S. K. Das, “Design and implementation of feedback resonance compensator in ha rd disk drive servo system: A mixed passivity, negative-imaginary and small- gain approach in discrete time,” Journal of Control, Automation and Electrical Systems , vol. 26, no. 4, pp. 390–402, 2015
2015
-
[7]
Absolute stability analysi s for negative- imaginary systems,
A. Dey, S. Patra, and S. Sen, “Absolute stability analysi s for negative- imaginary systems,” Automatica, vol. 67, pp. 107–113, 2016
2016
-
[8]
H. K. Khalil, Nonlinear systems . Prentice Hall Upper Saddle River, NJ, 2002, vol. 3
2002
-
[9]
On the input-output stability of time-varyin g nonlinear feedback systems part one: Conditions derived using concep ts of loop gain, conicity, and positivity,
G. Zames, “On the input-output stability of time-varyin g nonlinear feedback systems part one: Conditions derived using concep ts of loop gain, conicity, and positivity,” IEEE transactions on automatic control , vol. 11, no. 2, pp. 228–238, 1966
1966
-
[10]
Absolute stability of nonlinear systems of automatic control,
V .-M. Popov, “Absolute stability of nonlinear systems of automatic control,” Automation and Remote Control , vol. 22, no. 8, pp. 857–875, 1961
1961
-
[11]
Comment on “absolute stabi lity analy- sis for negative-imaginary systems
J. Carrasco and W. P . Heath, “Comment on “absolute stabi lity analy- sis for negative-imaginary systems”[automatica 67 (2016) 107–113],” Automatica, vol. 85, pp. 486–488, 2017
2016
-
[12]
Extendi ng negative imaginary systems theory to nonlinear systems,
A. G. Ghallab, M. A. Mabrok, and I. R. Petersen, “Extendi ng negative imaginary systems theory to nonlinear systems,” in 2018 IEEE Confer- ence on Decision and Control (CDC) . IEEE, 2018, pp. 2348–2353
2018
-
[13]
Systems with counterclockwise input-outp ut dynamics,
D. Angeli, “Systems with counterclockwise input-outp ut dynamics,” IEEE Transactions on automatic control , vol. 51, no. 7, pp. 1130–1143, 2006
2006
-
[14]
Robust out put feed- back consensus for networked identical nonlinear negative -imaginary systems,
K. Shi, I. G. Vladimirov, and I. R. Petersen, “Robust out put feed- back consensus for networked identical nonlinear negative -imaginary systems,” IF AC-PapersOnLine, vol. 54, no. 9, pp. 239–244, 2021
2021
-
[15]
A nonli near negative- imaginary systems framework with actuator saturation for c ontrol of electrical power systems,
Y . Chen, K. Shi, I. R. Petersen, and E. L. Ratnam, “A nonli near negative- imaginary systems framework with actuator saturation for c ontrol of electrical power systems,” in 2024 European Control Conference (ECC) . IEEE, 2024, pp. 2399–2404
2024
-
[16]
On the stability of networked nonlinear negative i magi- nary systems with applications to electrical power systems ,
——, “On the stability of networked nonlinear negative i magi- nary systems with applications to electrical power systems ,” IF AC- PapersOnLine, vol. 58, no. 17, pp. 220–225, 2024
2024
-
[17]
Output fee dback consensus for networked heterogeneous nonlinear negative-imaginar y systems with free-body motion,
K. Shi, I. R. Petersen, and I. G. Vladimirov, “Output fee dback consensus for networked heterogeneous nonlinear negative-imaginar y systems with free-body motion,” IEEE Transactions on Automatic Control , vol. 68, no. 9, pp. 5536–5543, 2023
2023
-
[18]
Output strictly negative im aginary systems and its connections to dissipativity theory,
P . Bhowmick and A. Lanzon, “Output strictly negative im aginary systems and its connections to dissipativity theory,” in 2019 IEEE 58th Conference on Decision and Control (CDC) . IEEE, 2019, pp. 6754– 6759
2019
-
[19]
Positive feedback interconnection of hamilto- nian systems,
A. V an der Schaft, “Positive feedback interconnection of hamilto- nian systems,” in 50th IEEE Conference of Decision and Control (CDC)/European Control Conference (ECC) . IEEE, 2011, pp. 6510– 6515
2011
-
[20]
Interconnections of input-output hamiltonian sy stems with dissi- pation,
——, “Interconnections of input-output hamiltonian sy stems with dissi- pation,” in 2016 IEEE 55th Conference on Decision and Control (CDC) . IEEE, 2016, pp. 4686–4691
2016
-
[21]
Negative imagina ry neural ODEs: Learning to control mechanical systems with stabilit y guaran- tees,
K. Shi, R. Wang, and I. R. Manchester, “Negative imagina ry neural ODEs: Learning to control mechanical systems with stabilit y guaran- tees,” IF AC-PapersOnLine, vol. 59, no. 19, pp. 358–363, 2025. 8
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.