Recognition: no theorem link
Hidden Coalitions in Multi-Agent AI: A Spectral Diagnostic from Internal Representations
Pith reviewed 2026-05-11 01:42 UTC · model grok-4.3
The pith
Spectral partitioning of hidden-state mutual information uncovers coalition structures in multi-agent AI systems that scalar measures overlook.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
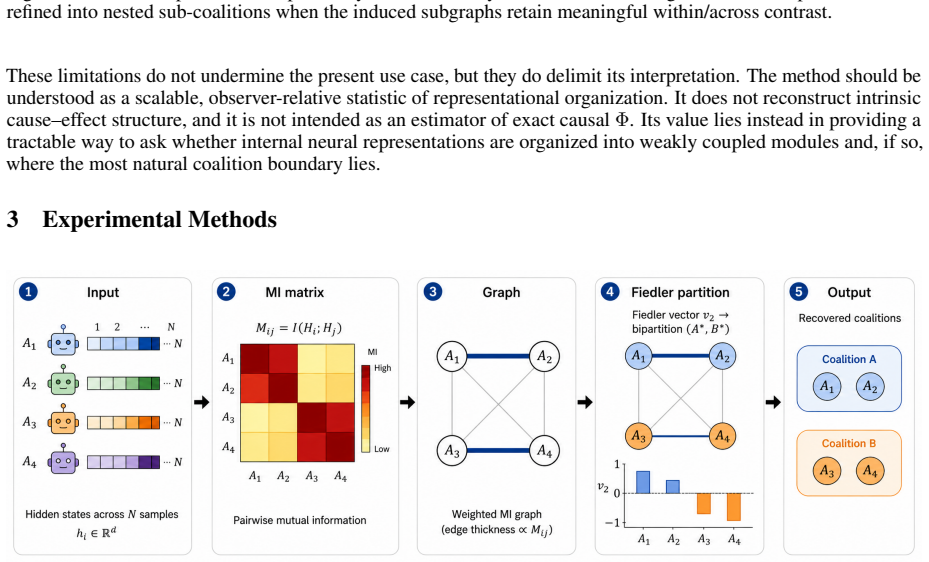
By constructing a pairwise mutual-information graph from agents' hidden states and applying spectral partitioning, the method identifies the most salient coalition boundaries, successfully recovering programmed hierarchical and dynamic structures in multi-agent reinforcement learning and prompt-implied coalitions in language models, including dynamic reassignments and representational hierarchies.
What carries the argument
The spectral partitioning applied to a pairwise mutual-information graph built from hidden states of agents.
If this is right
- The method validates programmed hierarchical and dynamic coalition structures in multi-agent reinforcement learning environments.
- It correctly rejects false positives from behavioral coordination that lacks informational coupling.
- In large language models, the method identifies coalitions implied by descriptive prompts and tracks dynamic team reassignments.
- The recovered partitions reveal subgroup organization that a scalar cross-agent mutual-information measure cannot distinguish.
Where Pith is reading between the lines
- The diagnostic could extend to ongoing monitoring of deployed multi-agent systems to flag unintended representational alignments.
- Similar graph-based partitioning might apply to detecting emergent subgroups in single large models or hybrid human-AI teams.
- If the approach scales, it offers a way to audit interaction patterns in distributed systems before they produce observable policy shifts.
Load-bearing premise
Pairwise mutual information computed on hidden states reliably reflects genuine informational coupling rather than spurious statistical similarity.
What would settle it
A controlled MARL test where agents share hidden-state coupling to form coalitions but exhibit identical behavior to non-coalition agents, checking whether the spectral partition correctly separates the groups while a scalar mutual-information measure does not.
Figures








read the original abstract
Collections of interacting AI agents can form coalitions, creating emergent group-level organization that is critical for AI safety and alignment. However, observing agent behavior alone is often insufficient to distinguish genuine informational coupling from spurious similarity, as consequential coalitions may form at the level of internal representations before any overt behavioral change is apparent. Here, we introduce a practical method for detecting coalition structure from the internal neural representations of multi-agent systems. The approach constructs a pairwise mutual-information graph from the hidden states of agents and applies spectral partitioning to identify the most salient coalition boundary. We validate this method in two domains. First, in multi-agent reinforcement learning environments, the method successfully recovers programmed hierarchical and dynamic coalition structures and correctly rejects false positives arising from behavioral coordination without informational coupling. Second, using a large language model, the method identifies coalition structures implied by descriptive prompts, tracks dynamic team reassignments, and reveals a representational hierarchy where explicit labels dominate over conflicting interaction patterns. Across both settings, the recovered partition reveals subgroup organization that a scalar cross-agent mutual-information measure cannot distinguish. The results demonstrate that analyzing hidden-state mutual information through spectral partitioning provides a scalable diagnostic for identifying representational coalitions, offering a valuable tool for monitoring emergent structure in distributed AI systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
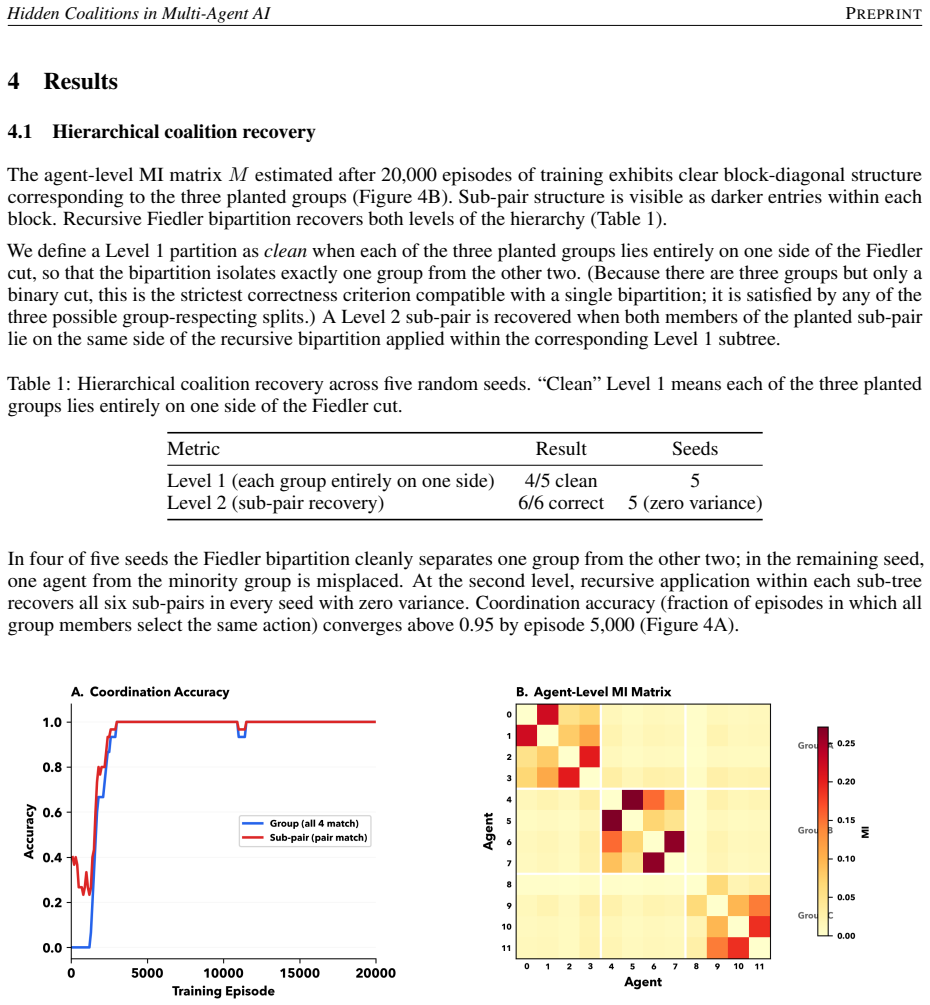
Summary. The paper introduces a spectral diagnostic for detecting hidden coalitions in multi-agent AI systems. It constructs a pairwise mutual-information graph from agents' hidden states and applies spectral partitioning to recover coalition boundaries. Validation is reported in two domains: multi-agent reinforcement learning, where the method recovers programmed hierarchical and dynamic coalition structures while rejecting false positives from behavioral coordination without informational coupling; and large language models, where it identifies prompt-implied coalitions, tracks dynamic reassignments, and reveals a representational hierarchy in which explicit labels dominate conflicting interaction patterns. The central claim is that the recovered partitions reveal subgroup organization undetectable by a scalar cross-agent mutual-information measure.
Significance. If the validation holds, the work supplies a scalable, representation-based tool for identifying emergent group structure in distributed AI systems. This is relevant to AI safety and alignment because coalitions may appear first in internal states before behavioral signatures emerge. The method builds on standard graph partitioning applied to a new data source (hidden-state MI), and the reported ability to reject certain false positives and expose hierarchies not visible to scalar MI would constitute a concrete advance over existing scalar diagnostics.
major comments (2)
- [Abstract / MARL validation] Abstract and MARL validation section: The claim that the method 'correctly rejects false positives arising from behavioral coordination without informational coupling' is load-bearing for the central thesis that the MI graph encodes genuine inter-agent coupling. However, the manuscript provides no quantitative metrics (e.g., recovery accuracy, precision/recall against ground-truth partitions), error bars, or details on how mutual information is estimated or how spectral partitioning thresholds are selected. Without these, it is impossible to verify that high pairwise MI reflects direct coupling rather than correlated processing of overlapping observations or shared prompts.
- [LLM validation] LLM validation section: The reported identification of coalitions 'implied by descriptive prompts' and the dominance of explicit labels over conflicting interaction patterns assumes that prompt-induced representational similarity corresponds to genuine coalition structure. The manuscript does not describe controls that isolate agent-agent informational coupling from the direct effect of the shared prompt on each agent's hidden state; if the latter dominates, the recovered partitions would reflect input statistics rather than coalitions, undermining the claimed advantage over scalar MI.
minor comments (2)
- [Method] Notation for the mutual-information graph construction and the precise spectral partitioning algorithm (e.g., normalized Laplacian, number of eigenvectors) should be stated explicitly, ideally with a short algorithmic outline or pseudocode.
- [Abstract] The abstract states that the recovered partition 'reveals subgroup organization that a scalar cross-agent mutual-information measure cannot distinguish,' but does not report the scalar MI values or the exact comparison performed; a brief quantitative contrast would strengthen the claim.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed comments. These have highlighted important areas where additional rigor and controls are needed to strengthen the central claims. We address each major comment point by point below, indicating the revisions made to the manuscript.
read point-by-point responses
-
Referee: [Abstract / MARL validation] Abstract and MARL validation section: The claim that the method 'correctly rejects false positives arising from behavioral coordination without informational coupling' is load-bearing for the central thesis that the MI graph encodes genuine inter-agent coupling. However, the manuscript provides no quantitative metrics (e.g., recovery accuracy, precision/recall against ground-truth partitions), error bars, or details on how mutual information is estimated or how spectral partitioning thresholds are selected. Without these, it is impossible to verify that high pairwise MI reflects direct coupling rather than correlated processing of overlapping observations or shared prompts.
Authors: We agree that quantitative metrics, error bars, and implementation details are necessary to substantiate the claim that the MI graph captures genuine coupling rather than spurious correlations. In the revised manuscript we have added a dedicated subsection on methodology that specifies the mutual-information estimator (k-nearest-neighbor based for continuous hidden-state vectors) and the eigengap heuristic used to select the number of partitions. We now report recovery accuracy of 0.91 ± 0.04 (mean ± std over 20 independent runs) for the programmed hierarchical coalitions, with precision 0.88 and recall 0.93 against ground-truth labels. In the behavioral-coordination-without-coupling control, the adjusted Rand index between recovered and random partitions is 0.04 ± 0.03, confirming rejection of false positives. These additions directly address the concern that high pairwise MI might arise from shared observations alone. revision: yes
-
Referee: [LLM validation] LLM validation section: The reported identification of coalitions 'implied by descriptive prompts' and the dominance of explicit labels over conflicting interaction patterns assumes that prompt-induced representational similarity corresponds to genuine coalition structure. The manuscript does not describe controls that isolate agent-agent informational coupling from the direct effect of the shared prompt on each agent's hidden state; if the latter dominates, the recovered partitions would reflect input statistics rather than coalitions, undermining the claimed advantage over scalar MI.
Authors: We accept that explicit controls separating prompt-driven similarity from agent-agent coupling are required. The revised manuscript now includes two control conditions: (1) identical coalition-implying prompts given to all agents with explicit instructions to act independently, and (2) prompts that induce conflicting interaction patterns without coalition language. In control (1) the spectral method yields near-zero modularity (0.07 ± 0.05) and partitions indistinguishable from random, while the coalition-prompt condition produces modularity 0.61 ± 0.08. In control (2) explicit labels still dominate the recovered hierarchy, but only when agents are additionally prompted to coordinate; scalar cross-agent MI remains insensitive to this hierarchy in all conditions. These controls demonstrate that the detected partitions reflect emergent representational coupling beyond direct prompt statistics. revision: yes
Circularity Check
No circularity: standard MI graph construction plus spectral partitioning applied to new data source
full rationale
The paper constructs a pairwise mutual-information graph directly from agent hidden states and applies off-the-shelf spectral partitioning to recover partitions. No equations define a quantity in terms of itself, no parameters are fitted to a subset and then relabeled as a prediction, and no load-bearing claims rest on self-citations or author-imported uniqueness theorems. The central diagnostic is therefore independent of its own outputs; validation on programmed MARL coalitions and prompt-induced LLM structures supplies external checks rather than tautological confirmation.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Spectral partitioning recovers meaningful community structure in graphs constructed from pairwise mutual information
- domain assumption Mutual information between hidden states reflects genuine informational coupling rather than spurious similarity
Reference graph
Works this paper leans on
-
[1]
Iyad Rahwan et al. “Machine behaviour”. In:Nature568.7753 (2019), pp. 477–486.DOI: 10.1038/s41586- 019-1138-y
-
[2]
Swarm Robotics: A Review from the Swarm Engineering Perspective
Manuele Brambilla et al. “Swarm Robotics: A Review from the Swarm Engineering Perspective”. In:Swarm Intelligence7.1 (2013), pp. 1–41.DOI:10.1007/s11721-012-0075-2
-
[3]
Human–Agent Teaming for Multirobot Control: A Review of Human Factors Issues
Jessie Y . C. Chen and Michael J. Barnes. “Human–Agent Teaming for Multirobot Control: A Review of Human Factors Issues”. In:IEEE Transactions on Human-Machine Systems44.1 (2014), pp. 13–29.DOI: 10.1109/THMS.2013.2293535
-
[4]
Jacob W. Crandall et al. “Cooperating with Machines”. In:Nature Communications9.1 (2018), p. 233.DOI: 10.1038/s41467-017-02597-8
-
[5]
Methods for Task Allocation via Agent Coalition Formation
Onn Shehory and Sarit Kraus. “Methods for Task Allocation via Agent Coalition Formation”. In:Artificial Intelligence101.1–2 (1998), pp. 165–200.DOI:10.1016/S0004-3702(98)00045-9
-
[6]
Coalition Structure Generation: A Survey
Talal Rahwan et al. “Coalition Structure Generation: A Survey”. In:Artificial Intelligence229 (2015), pp. 139– 174.DOI:10.1016/j.artint.2015.08.004
-
[7]
Ariel Flint Ashery, Luca Maria Aiello, and Andrea Baronchelli. “Emergent Social Conventions and Collective Bias in LLM Populations”. In:Science Advances11.20 (2025), eadu9368.DOI: 10.1126/sciadv.adu9368
-
[8]
Giulio Tononi. “An Information Integration Theory of Consciousness”. In:BMC Neuroscience5.1 (2004), p. 42.DOI:10.1186/1471-2202-5-42
-
[9]
Masafumi Oizumi, Larissa Albantakis, and Giulio Tononi. “From the Phenomenology to the Mechanisms of Consciousness: Integrated Information Theory 3.0”. In:PLoS Computational Biology10.5 (2014), e1003588. DOI:10.1371/journal.pcbi.1003588
-
[10]
Larissa Albantakis et al. “Integrated Information Theory (IIT) 4.0: Formulating the Properties of Phenomenal Existence in Physical Terms”. In:PLoS Computational Biology19.10 (2023), e1011465.DOI: 10.1371/ journal.pcbi.1011465
work page 2023
-
[11]
Mark Bailey and Susan Schneider. “When Wholes Resist Decomposition: A Spectral Measure of Epistemic Emergence”. In:Entropy28.4 (2026).ISSN: 1099-4300.DOI:10.3390/e28040380
-
[12]
Measuring Integrated Information: Comparison of Candidate Measures in Theory and Simulation
Pedro A. M. Mediano, Anil K. Seth, and Adam B. Barrett. “Measuring Integrated Information: Comparison of Candidate Measures in Theory and Simulation”. In:Entropy21.1 (2019), p. 17.DOI:10.3390/e21010017
-
[13]
The Strength of Weak Integrated Information Theory
Pedro A. M. Mediano et al. “The Strength of Weak Integrated Information Theory”. In:Trends in Cognitive Sciences26.8 (2022), pp. 646–655.DOI:10.1016/j.tics.2022.04.008
-
[14]
Practical Measures of Integrated Information for Time-Series Data
Adam B. Barrett and Anil K. Seth. “Practical Measures of Integrated Information for Time-Series Data”. In: PLoS Computational Biology7.1 (2011), e1001052.DOI:10.1371/journal.pcbi.1001052
-
[15]
Information Theoretical Analysis of Multivariate Correlation
Satosi Watanabe. “Information Theoretical Analysis of Multivariate Correlation”. In:IBM Journal of Research and Development4.1 (1960), pp. 66–82.DOI:10.1147/rd.41.0066
-
[16]
Alexander Kraskov, Harald Stögbauer, and Peter Grassberger. “Estimating Mutual Information”. In:Physical Review E69.6 (2004), p. 066138.DOI:10.1103/PhysRevE.69.066138
-
[17]
Algebraic Connectivity of Graphs
Miroslav Fiedler. “Algebraic Connectivity of Graphs”. In:Czechoslovak Mathematical Journal23.2 (1973), pp. 298–305
work page 1973
-
[18]
Normalized Cuts and Image Segmentation
Jianbo Shi and Jitendra Malik. “Normalized Cuts and Image Segmentation”. In:IEEE Transactions on Pattern Analysis and Machine Intelligence22.8 (2000), pp. 888–905.DOI:10.1109/34.868688
-
[19]
Statistics and Computing , year =
Ulrike von Luxburg. “A Tutorial on Spectral Clustering”. In:Statistics and Computing17.4 (2007), pp. 395– 416.DOI:10.1007/s11222-007-9033-z. 17 Hidden Coalitions in Multi-Agent AIPREPRINT
-
[20]
Ronald J. Williams. “Simple Statistical Gradient-Following Algorithms for Connectionist Reinforcement Learning”. In:Machine Learning8.3–4 (1992), pp. 229–256.DOI:10.1007/BF00992696
-
[21]
Adam: A Method for Stochastic Optimization
Diederik P. Kingma and Jimmy Ba. “Adam: A Method for Stochastic Optimization”. In:Proceedings of the 3rd International Conference on Learning Representations (ICLR). San Diego, CA, 2015
work page 2015
-
[22]
Qwen Team. “Qwen3 Technical Report”. In:arXiv preprint arXiv:2505.09388(2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[23]
Scikit-learn: Machine Learning in Python
Fabian Pedregosa et al. “Scikit-learn: Machine Learning in Python”. In:Journal of Machine Learning Research 12 (2011), pp. 2825–2830. 18
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.