Recognition: 2 theorem links
· Lean TheoremVariational PMB filter via coordinate descent Kullback-Leibler divergence minimisation
Pith reviewed 2026-05-11 01:15 UTC · model grok-4.3
The pith
The variational PMB filter performs coordinate descent Kullback-Leibler divergence minimization on an augmented space to approximate the PMBM posterior while preserving its probability hypothesis density.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We show that the V-PMB projection performs a coordinate descent Kullback-Leibler divergence (KLD) minimisation on this augmented space to fit the best possible PMB density to the Poisson multi-Bernoulli mixture (PMBM) posterior. We also show that this V-PMB projection keeps the probability hypothesis density of the posterior.
What carries the argument
An augmented state space that includes the set of target states with their track indices and the global hypothesis variable, enabling coordinate descent KLD minimization to project the PMBM posterior onto a PMB density.
If this is right
- The V-PMB filter represents the optimal PMB approximation to the PMBM posterior under coordinate descent KLD minimization.
- The probability hypothesis density of the posterior is exactly preserved in the V-PMB approximation.
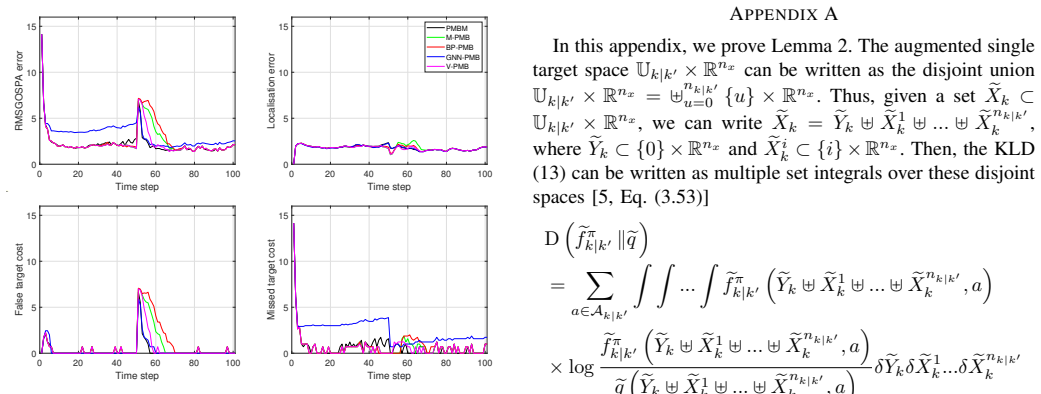
- The V-PMB filter shows improved performance over other PMB variants in multi-target scenarios involving close target proximity and subsequent separation.
- It provides a bridge between the full PMBM filter and simpler PMB implementations.
Where Pith is reading between the lines
- This coordinate descent view could facilitate hybrid filters that combine variational approximations with other optimization techniques.
- Similar augmented spaces might be used to derive variational versions of additional multi-object filters.
- The PHD preservation property suggests direct compatibility with existing PHD-based systems without recalibration of intensity functions.
Load-bearing premise
The augmented space of target states, track indices, and global hypothesis variable is the appropriate domain for performing the coordinate descent KLD minimization without introducing unaccounted bias in the approximation.
What would settle it
A direct numerical comparison of the KLD achieved by the V-PMB projection versus a brute-force minimization over PMB parameters on the same augmented space would falsify the coordinate descent claim if the values differ substantially; tracking error statistics in close-proximity target scenarios would also falsify the claimed benefits if they fail to exceed those of the track-oriented Murty or loopy belief propagation PMB variants.
Figures


read the original abstract
This paper presents a new derivation of the variational Poisson multi-Bernoulli (V-PMB) filter for multi-target estimation proposed in [#Williams15]. The proposed derivation is based on considering an augmented space that includes the set of target states with their track indices and the global hypothesis variable. Then, we show that the V-PMB projection performs a coordinate descent Kullback-Leibler divergence (KLD) minimisation on this augmented space to fit the best possible PMB density to the Poisson multi-Bernoulli mixture (PMBM) posterior. We also show that this V-PMB projection keeps the probability hypothesis density of the posterior. The paper also includes a comparison with the PMBM filter and other PMB filter variants, including a track-oriented Murty-based implementation, a track-oriented loopy belief propagation implementation and a global nearest neighbour implementation, showing the benefits of the V-PMB filter compared to the other PMB filters when targets get in close proximity and then separate.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a new derivation of the variational Poisson multi-Bernoulli (V-PMB) filter for multi-target tracking. It augments the state space with target states, track indices, and a global hypothesis variable, then shows that the V-PMB projection onto a PMB density is equivalent to performing coordinate-descent minimization of the Kullback-Leibler divergence (KLD) on this augmented space applied to the Poisson multi-Bernoulli mixture (PMBM) posterior. The derivation also establishes that the projection preserves the probability hypothesis density (PHD) of the posterior. Numerical comparisons are provided against the PMBM filter and several PMB variants (Murty-based, loopy belief propagation, global nearest neighbour) in scenarios with closely spaced targets.
Significance. If the central derivation is correct, the work supplies a principled variational justification for the V-PMB filter originally proposed in Williams (2015), clarifying its relationship to coordinate-descent KLD minimization and confirming PHD preservation. This could strengthen the theoretical foundation for using V-PMB approximations in multi-target filters and explain observed performance gains over other PMB implementations when targets interact closely.
major comments (3)
- [Abstract and derivation section (around the augmented-space construction)] The abstract and introduction claim that the V-PMB projection equals coordinate-descent KLD minimization on the augmented space (target states + track indices + global hypothesis) and that this yields the best PMB fit to the PMBM posterior. However, the provided text does not explicitly derive that the KLD functional on the augmented measure reduces exactly to the standard KLD between the PMBM posterior and a PMB density without residual cross-terms arising from the discrete track/hypothesis variables. This reduction is load-bearing for the equivalence claim.
- [Derivation of the coordinate-descent updates and marginalization step] It is stated that the resulting marginal on target states is identical to the original Williams (2015) V-PMB updates and that coordinate-wise updates coincide with those updates. The manuscript does not show the explicit algebraic steps confirming that the marginalization over the augmented variables leaves the target-state marginal unchanged or that the fixed-point equations match the earlier formulation. Any unaccounted dependence on the global hypothesis variable would introduce bias not quantified in the numerical comparisons.
- [PHD-preservation argument] The claim that the projection preserves the PHD of the PMBM posterior is asserted but the proof sketch relies on the same augmented-space construction. Without the full expansion showing that the first-moment integral is invariant under the coordinate-descent steps, it is not possible to verify that PHD preservation follows directly from the KLD minimization rather than from an additional assumption.
minor comments (2)
- [Notation and preliminaries] Notation for the augmented density and the discrete variables (track indices, global hypothesis) should be introduced with a clear table or diagram early in the derivation to avoid ambiguity when marginalizing.
- [Simulation results] The numerical section would benefit from an explicit statement of the KLD values (or a proxy) achieved by each method on the test scenarios, rather than only reporting OSPA or cardinality errors.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. The points raised correctly identify places where the derivation would benefit from greater explicitness. We address each major comment below and will revise the manuscript to incorporate the requested details.
read point-by-point responses
-
Referee: [Abstract and derivation section (around the augmented-space construction)] The abstract and introduction claim that the V-PMB projection equals coordinate-descent KLD minimization on the augmented space (target states + track indices + global hypothesis) and that this yields the best PMB fit to the PMBM posterior. However, the provided text does not explicitly derive that the KLD functional on the augmented measure reduces exactly to the standard KLD between the PMBM posterior and a PMB density without residual cross-terms arising from the discrete track/hypothesis variables. This reduction is load-bearing for the equivalence claim.
Authors: We acknowledge that the reduction step is only outlined rather than fully expanded in the current text. The augmented-space KLD does reduce to the ordinary KLD between the PMBM posterior and a PMB density because the discrete track and hypothesis variables factor out under the product-form structure of the PMB approximation; the cross terms therefore vanish identically. In the revised manuscript we will add a dedicated derivation subsection that carries out this reduction algebraically, confirming the absence of residual terms. revision: yes
-
Referee: [Derivation of the coordinate-descent updates and marginalization step] It is stated that the resulting marginal on target states is identical to the original Williams (2015) V-PMB updates and that coordinate-wise updates coincide with those updates. The manuscript does not show the explicit algebraic steps confirming that the marginalization over the augmented variables leaves the target-state marginal unchanged or that the fixed-point equations match the earlier formulation. Any unaccounted dependence on the global hypothesis variable would introduce bias not quantified in the numerical comparisons.
Authors: The referee correctly notes that the explicit marginalization algebra is missing. Because the PMB density factorizes across targets, alternating minimization over the continuous state densities and the discrete assignment variables (track indices and global hypothesis) yields target-state marginals that are independent of the global hypothesis once the discrete variables are summed out. We will insert the full fixed-point equations and the marginalization steps in the revision to demonstrate that the updates are identical to those of Williams (2015) and that no additional bias is introduced. revision: yes
-
Referee: [PHD-preservation argument] The claim that the projection preserves the PHD of the PMBM posterior is asserted but the proof sketch relies on the same augmented-space construction. Without the full expansion showing that the first-moment integral is invariant under the coordinate-descent steps, it is not possible to verify that PHD preservation follows directly from the KLD minimization rather than from an additional assumption.
Authors: We agree that the invariance of the first-moment measure must be shown explicitly. Each coordinate-descent step preserves the intensity function because the KLD objective is minimized subject to the PMB factorization while keeping the integrated intensity fixed; the first-moment integral is therefore unchanged after every update. The revised manuscript will contain the complete expansion of the first-moment integral before and after each descent iteration, establishing that PHD preservation is a direct consequence of the minimization rather than an extra assumption. revision: yes
Circularity Check
Augmented-space KLD coordinate-descent derivation is analytically independent of the original V-PMB definition
full rationale
The paper constructs an augmented space (target states + track indices + global hypothesis) and proves that the existing V-PMB projection from Williams15 performs coordinate-descent KLD minimization on that space while preserving the posterior PHD. This is an equivalence result obtained by direct analysis of the KLD functional on the chosen measure; the steps do not reduce the claimed minimization to the input PMBM density by definition, nor do they rename a fitted parameter as a prediction. The sole external citation is to prior work by a different author and is used only to identify the target filter, not to justify uniqueness or smuggle an ansatz. No load-bearing self-citation chain or self-definitional loop appears in the derivation chain.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The multi-target posterior admits a Poisson multi-Bernoulli mixture representation.
- domain assumption Kullback-Leibler divergence is a suitable divergence measure for projecting onto the PMB family.
Reference graph
Works this paper leans on
-
[1]
An efficient, variational approximation of the best fitting multi-Bernoulli filter,
J. L. Williams, “An efficient, variational approximation of the best fitting multi-Bernoulli filter,”IEEE Transactions on Signal Processing, vol. 63, no. 1, pp. 258–273, Jan. 2015
work page 2015
-
[2]
Mono-camera 3D multi-object tracking using deep learning detections and PMBM filtering,
S. Scheidegger, J. Benjaminsson, E. Rosenberg, A.Krishnan, and K. Granström, “Mono-camera 3D multi-object tracking using deep learning detections and PMBM filtering,” inIEEE Intelligent Vehicles Symposium, 2018, pp. 433–440
work page 2018
-
[3]
E. F. Brekke, A. G. Hem, and L.-C. N. Tokle, “Multitarget tracking with multiple models and visibility: Derivation and verification on maritime radar data,”IEEE Journal of Oceanic Engineering, vol. 46, no. 4, pp. 1272–1287, 2021
work page 2021
-
[4]
A new multi-target tracking algorithm for a large number of orbiting objects,
E. Delande, J. Houssineau, J. Franco, C. Frueh, D. Clark, and M. Jah, “A new multi-target tracking algorithm for a large number of orbiting objects,”Advances in Space Research, vol. 64, pp. 645–667, 2019
work page 2019
-
[5]
R. P. S. Mahler,Advances in Statistical Multisource-Multitarget Infor- mation Fusion. Artech House, 2014
work page 2014
-
[6]
Marginal multi-Bernoulli filters: RFS derivation of MHT, JIPDA and association-based MeMBer,
J. L. Williams, “Marginal multi-Bernoulli filters: RFS derivation of MHT, JIPDA and association-based MeMBer,”IEEE Transactions on Aerospace and Electronic Systems, vol. 51, no. 3, pp. 1664–1687, July 2015
work page 2015
-
[7]
Poisson multi-Bernoulli mixture filter: direct derivation and imple- mentation,
A. F. García-Fernández, J. L. Williams, K. Granström, and L. Svensson, “Poisson multi-Bernoulli mixture filter: direct derivation and imple- mentation,”IEEE Transactions on Aerospace and Electronic Systems, vol. 54, no. 4, pp. 1883–1901, Aug. 2018
work page 1901
-
[8]
Poisson multi-Bernoulli mixture conjugate prior for multiple extended target filtering,
K. Granström, M. Fatemi, and L. Svensson, “Poisson multi-Bernoulli mixture conjugate prior for multiple extended target filtering,”IEEE Transactions on Aerospace and Electronic Systems, vol. 56, no. 1, pp. 208–225, Feb. 2020
work page 2020
-
[9]
A. F. García-Fernández, Y . Xia, and L. Svensson, “Poisson multi- Bernoulli mixture filter with general target-generated measurements and arbitrary clutter,”IEEE Transactions on Signal Processing, vol. 71, pp. 1895–1906, 2023
work page 1906
-
[10]
Trajectory Poisson multi-Bernoulli filters,
A. F. García-Fernández, L. Svensson, J. L. Williams, Y . Xia, and K. Granström, “Trajectory Poisson multi-Bernoulli filters,”IEEE Trans- actions on Signal Processing, vol. 68, pp. 4933–4945, 2020
work page 2020
-
[11]
Sonar tracking of multiple targets using joint probabilistic data association,
T. Fortmann, Y . Bar-Shalom, and M. Scheffe, “Sonar tracking of multiple targets using joint probabilistic data association,”IEEE Journal of Oceanic Engineering, vol. 8, no. 3, pp. 173 –184, Jul. 1983
work page 1983
-
[12]
Joint integrated probabilistic data association: JIPDA,
D. Musicki and R. Evans, “Joint integrated probabilistic data association: JIPDA,”IEEE Transactions on Aerospace and Electronic Systems, vol. 40, no. 3, pp. 1093–1099, July 2004
work page 2004
-
[13]
An algorithm for ranking all the assignments in order of increasing cost
K. G. Murty, “An algorithm for ranking all the assignments in order of increasing cost.”Operations Research, vol. 16, no. 3, pp. 682–687, 1968
work page 1968
-
[14]
Approximate evaluation of marginal association probabilities with belief propagation,
J. Williams and R. Lau, “Approximate evaluation of marginal association probabilities with belief propagation,”IEEE Transactions on Aerospace and Electronic Systems, vol. 50, no. 4, pp. 2942–2959, Oct. 2014
work page 2014
-
[15]
Message passing algorithms for scalable multitarget tracking,
F. Meyer, T. Kropfreiter, J. L. Williams, R. Lau, F. Hlawatsch, P. Braca, and M. Z. Win, “Message passing algorithms for scalable multitarget tracking,”Proceedings of the IEEE, vol. 106, no. 2, pp. 221–259, Feb. 2018
work page 2018
-
[16]
Set-type belief propagation with applications to Pois- son multi-Bernoulli SLAM,
H. Kim, A. F. García-Fernández, Y . Ge, Y . Xia, L. Svensson, and H. Wymeersch, “Set-type belief propagation with applications to Pois- son multi-Bernoulli SLAM,”IEEE Transactions on Signal Processing, vol. 72, pp. 1989–2005, 2024
work page 1989
-
[17]
Set JPDA filter for multitarget tracking,
L. Svensson, D. Svensson, M. Guerriero, and P. Willett, “Set JPDA filter for multitarget tracking,”IEEE Transactions on Signal Processing, vol. 59, no. 10, pp. 4677–4691, Oct. 2011
work page 2011
-
[18]
A track-before-detect labeled multi-Bernoulli particle filter with label switching,
A. F. García-Fernández, “A track-before-detect labeled multi-Bernoulli particle filter with label switching,”IEEE Transactions on Aerospace and Electronic Systems, vol. 52, no. 5, pp. 2123–2138, Oct. 2016
work page 2016
-
[19]
The best fitting multi-Bernoulli filter,
J. L. Williams, “The best fitting multi-Bernoulli filter,” inIEEE Work- shop on Statistical Signal Processing, 2014, pp. 220–223
work page 2014
-
[20]
Poisson multi-Bernoulli approximations for mul- tiple extended object filtering,
Y . Xia, K. Granström, L. Svensson, M. Fatemi, A. F. García-Fernández, and J. L. Williams, “Poisson multi-Bernoulli approximations for mul- tiple extended object filtering,”IEEE Transactions on Aerospace and Electronic Systems, vol. 58, no. 2, pp. 890–906, 2022
work page 2022
-
[21]
Trajectory PMB filters for extended object tracking using belief propagation,
Y . Xia, A. F. García-Fernández, F. Meyer, J. L. Williams, K. Granström, and L. Svensson, “Trajectory PMB filters for extended object tracking using belief propagation,”IEEE Transactions on Aerospace and Elec- tronic Systems, vol. 59, no. 6, pp. 9312–9331, 2023
work page 2023
-
[22]
Filtering via simulation: Auxiliary particle filters,
M. K. Pitt and N. Shephard, “Filtering via simulation: Auxiliary particle filters,”Journal of the American Statistical Association, vol. 94, no. 446, pp. 590–599, Jun. 1999
work page 1999
-
[23]
Data-driven clustering and Bernoulli merging for the Poisson multi-Bernoulli mixture filter,
M. Fontana, A. F. García-Fernández, and S. Maskell, “Data-driven clustering and Bernoulli merging for the Poisson multi-Bernoulli mixture filter,”IEEE Transactions on Aerospace and Electronic Systems, vol. 59, no. 5, pp. 5287–5301, 2023
work page 2023
-
[24]
On implementing 2D rectangular assignment algorithms,
D. F. Crouse, “On implementing 2D rectangular assignment algorithms,” IEEE Transactions on Aerospace and Electronic Systems, vol. 52, no. 4, pp. 1679–1696, August 2016
work page 2016
-
[25]
Wymeersch,Iterative receiver design
H. Wymeersch,Iterative receiver design. Cambridge University Press, 2007
work page 2007
-
[26]
C. M. Bishop,Pattern Recognition and Machine Learning. Springer, 2006
work page 2006
-
[27]
The tracker component library: free routines for rapid prototyping,
D. F. Crouse, “The tracker component library: free routines for rapid prototyping,”IEEE Aerospace and Electronic Systems Magazine, vol. 32, no. 5, pp. 18–27, 2017
work page 2017
-
[28]
Gen- eralized optimal sub-pattern assignment metric,
A. S. Rahmathullah, A. F. García-Fernández, and L. Svensson, “Gen- eralized optimal sub-pattern assignment metric,” in20th International Conference on Information Fusion, 2017, pp. 1–8
work page 2017
-
[29]
Approximating the Kullback Leibler di- vergence between Gaussian mixture models,
J. Hershey and P. Olsen, “Approximating the Kullback Leibler di- vergence between Gaussian mixture models,” inIEEE International Conference on Acoustics, Speech and Signal Processing, vol. 4, April 2007, pp. 317–320
work page 2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.