Recognition: 2 theorem links
· Lean TheoremRCoT-Seg: Reinforced Chain-of-Thought for Video Reasoning and Segmentation
Pith reviewed 2026-05-11 01:12 UTC · model grok-4.3
The pith
RCoT-Seg factorizes video reasoning segmentation into reinforced chain-of-thought temporal reasoning and SAM2-based spatial perception to improve keyframe selection and mask consistency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
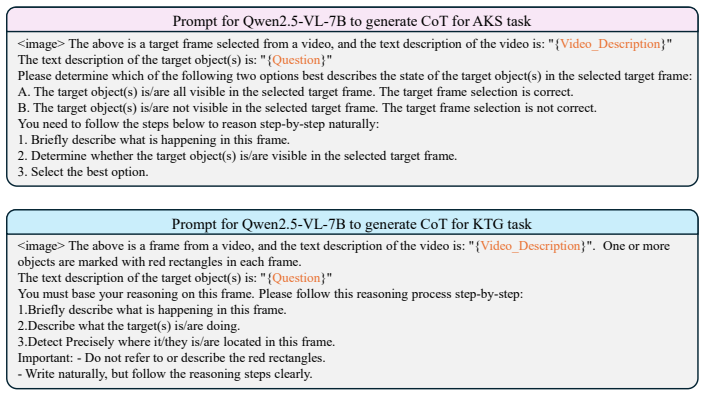
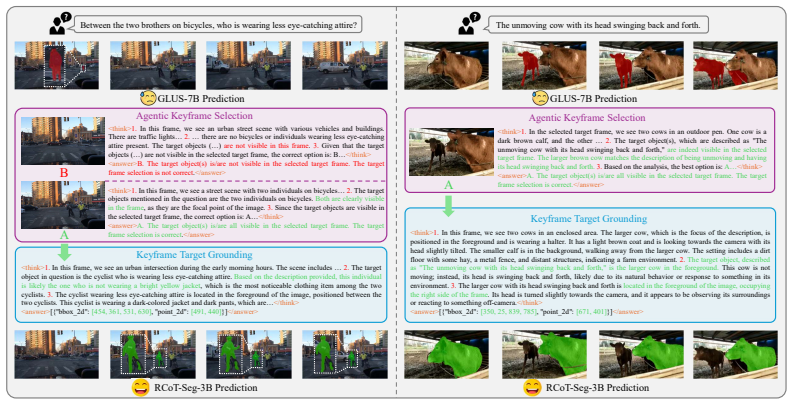
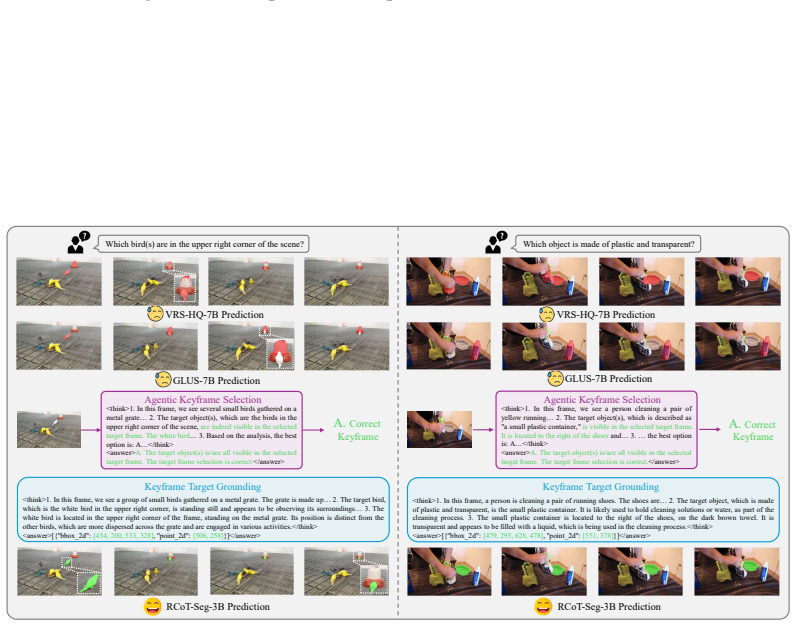
RCoT-Seg factorizes VRS into TVR and KTP. In the TVR stage an agentic keyframe selection module initialized with a curated CoT-start corpus and refined by GRPO under task-aligned rewards generates and reselects keyframes through self-evaluation. In the KTP stage it performs high-resolution segmentation on the chosen frame and propagates masks with SAM2-based methods across the sequence, replacing heuristic sampling and external selectors.
What carries the argument
The agentic keyframe selection module refined by GRPO under task-aligned rewards, which performs self-evaluation to generate and reselect keyframes in the temporal video reasoning stage.
If this is right
- Strengthens moment localization and temporal reasoning for implicit instructions in multi-object scenes.
- Improves spatial precision and inter-frame mask consistency by using high-resolution segmentation followed by SAM2 propagation.
- Replaces heuristic sampling and external frame selectors with an integrated self-evaluative process.
- Delivers favorable performance against state-of-the-art methods on video reasoning segmentation benchmarks.
Where Pith is reading between the lines
- The separation of temporal reasoning from spatial perception could transfer to other video tasks that require inferring intent across time, such as action anticipation or event localization.
- Self-evaluation inside the keyframe module may lessen dependence on separate large models for frame picking in longer videos.
- Expanding the initial CoT-start corpus with more varied temporal logic examples might improve robustness to unseen instruction styles.
Load-bearing premise
That GRPO refinement on a curated CoT-start corpus under task-aligned rewards will produce keyframe selections that strengthen holistic temporal understanding instead of overfitting to the specific reward signals or corpus biases.
What would settle it
A test set of complex multi-object videos where the reinforced keyframe selections yield segmentation accuracy no higher than, or lower than, simple uniform sampling or auxiliary-MLLM selection when measured by standard mask metrics on the full sequence.
Figures













read the original abstract
Video Reasoning Segmentation (VRS) aims to segment target objects in videos based on implicit instructions that convey human intent and temporal logic. Existing MLLM-based methods predict masks with a [SEG] token after selecting frames via simple sampling or an auxiliary MLLM, where limited supervision and frame-language similarity rules often yield narrow-scope keyframe choices that weaken holistic temporal understanding and lead to brittle localization in complex multi-object scenes. To address these issues, we introduce RCoT-Seg, a video-of-thought framework that factorizes VRS into temporal video reasoning (TVR) and keyframe target perception (KTP), explicitly separating temporal reasoning from spatial perception. Specifically, in the TVR stage, an agentic keyframe selection module, initialized with a curated CoT-start corpus and refined by GRPO under task-aligned rewards, is proposed to generate and reselect the keyframe through self-evaluation, strengthening moment localization and temporal reasoning. In the KTP stage, RCoT-Seg performs high-resolution segmentation on the selected frame and propagates masks with SAM2-based methods across the sequence, replacing heuristic sampling and external selectors while improving spatial precision and inter-frame consistency. Extensive experimental results demonstrate that the proposed RCoT-Seg achieves favorable performance against the state-of-the-art methods. The code and models will be publicly released at https://github.com/Victor-wjw/RCoT-Seg.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes RCoT-Seg, a video-of-thought framework for Video Reasoning Segmentation (VRS) that factorizes the task into a temporal video reasoning (TVR) stage—an agentic keyframe selector initialized on a curated CoT-start corpus and refined via GRPO under task-aligned rewards with self-evaluation—and a keyframe target perception (KTP) stage that performs high-resolution segmentation on the selected frame before propagating masks via SAM2. It claims this separation of temporal reasoning from spatial perception overcomes limitations of heuristic sampling and external selectors, yielding favorable performance over state-of-the-art MLLM-based methods.
Significance. If the GRPO refinement can be shown to produce keyframes that genuinely strengthen holistic temporal understanding and localization in multi-object scenes without overfitting to reward signals or corpus biases, the explicit factorization could advance agentic MLLM pipelines for video tasks involving implicit instructions. The planned public release of code and models is a clear strength for reproducibility.
major comments (3)
- [§3.2] §3.2 (TVR stage, GRPO refinement): The task-aligned rewards are defined directly in terms of downstream segmentation quality. This creates a circularity risk—the reported gains in keyframe selection may partly reflect optimization toward the evaluation metric rather than improved temporal reasoning. No sensitivity analysis or alternative reward formulations are provided to rule this out.
- [§4] §4 (Experiments): The central claim that GRPO produces keyframes strengthening holistic moment localization rests on the assumption that gains exceed those from the curated CoT-start corpus alone. No ablation isolating GRPO’s contribution from corpus initialization or from standard sampling is reported, leaving open whether improvements address brittle localization or exploit dataset-specific patterns.
- [§4.2–4.3] §4.2–4.3 (Results and ablations): Absence of cross-dataset generalization tests or error analysis focused on complex multi-object scenes means the headline superiority claim cannot be verified to survive standard controls for reward hacking or post-hoc selection. This directly undermines the weakest assumption that the agentic selector delivers genuine temporal reasoning gains.
minor comments (2)
- [Abstract] Abstract: The statement of 'favorable performance against the state-of-the-art methods' is too vague; a brief summary of key metrics, baselines, and dataset names would improve immediate readability.
- [§3] Notation: GRPO is introduced without expansion on first use; spelling out the full term (and clarifying its relation to standard RL methods) in §3 would aid readers.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and detailed comments, which help clarify the presentation of our contributions. We address each major point below and will revise the manuscript accordingly to strengthen the evidence for the GRPO component and its role in temporal reasoning.
read point-by-point responses
-
Referee: [§3.2] §3.2 (TVR stage, GRPO refinement): The task-aligned rewards are defined directly in terms of downstream segmentation quality. This creates a circularity risk—the reported gains in keyframe selection may partly reflect optimization toward the evaluation metric rather than improved temporal reasoning. No sensitivity analysis or alternative reward formulations are provided to rule this out.
Authors: We acknowledge the referee's concern regarding potential circularity. The rewards are deliberately task-aligned because the ultimate objective of VRS is accurate segmentation under implicit instructions; however, we agree that this requires explicit validation. In the revised manuscript, we will add a sensitivity analysis in §3.2 that varies reward weightings (e.g., emphasizing temporal consistency and self-evaluation terms independently of final IoU) and compares against an alternative reward formulation based solely on keyframe-language alignment metrics without downstream segmentation feedback. These results will be reported in new tables to demonstrate that GRPO improvements are not solely due to direct metric optimization. revision: yes
-
Referee: [§4] §4 (Experiments): The central claim that GRPO produces keyframes strengthening holistic moment localization rests on the assumption that gains exceed those from the curated CoT-start corpus alone. No ablation isolating GRPO’s contribution from corpus initialization or from standard sampling is reported, leaving open whether improvements address brittle localization or exploit dataset-specific patterns.
Authors: We agree that isolating GRPO's incremental benefit is necessary to substantiate the central claim. While the original experiments compare against MLLM baselines and heuristic sampling, they do not explicitly ablate the GRPO refinement step from the CoT-start corpus initialization. We will add a dedicated ablation study in §4 that includes: (1) the agent initialized only on the CoT-start corpus without GRPO, (2) standard uniform or similarity-based sampling, and (3) the full GRPO-refined selector. This will quantify the specific contribution of reinforcement learning to improved moment localization and temporal reasoning. revision: yes
-
Referee: [§4.2–4.3] §4.2–4.3 (Results and ablations): Absence of cross-dataset generalization tests or error analysis focused on complex multi-object scenes means the headline superiority claim cannot be verified to survive standard controls for reward hacking or post-hoc selection. This directly undermines the weakest assumption that the agentic selector delivers genuine temporal reasoning gains.
Authors: We recognize that cross-dataset evaluation and targeted error analysis are important for ruling out dataset-specific effects and reward hacking. Our primary results follow the evaluation protocols of prior VRS work on established benchmarks to ensure comparability. In the revision, we will expand §4.2–4.3 with a detailed error analysis on multi-object and complex temporal scenes, including quantitative breakdowns and qualitative examples showing how the GRPO selector improves localization over baselines. We will also add cross-dataset results on an additional benchmark where feasible. These additions will provide stronger evidence that the observed gains reflect genuine improvements in temporal reasoning rather than post-hoc selection artifacts. revision: partial
Circularity Check
No significant circularity; method and claims are empirically grounded
full rationale
The paper introduces RCoT-Seg as a factorization of VRS into TVR (agentic keyframe selection via GRPO on a curated corpus) and KTP (SAM2-based segmentation). Performance is asserted via experimental comparison to SOTA methods rather than any closed-form derivation or prediction that reduces to the inputs by construction. No equations are presented that equate outputs to fitted parameters or self-evaluations; the GRPO rewards are described as task-aligned but the validation remains external empirical testing. No self-citation chains, uniqueness theorems, or ansatz smuggling appear in the abstract or described pipeline. The derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- task-aligned reward weights
axioms (2)
- domain assumption A curated CoT-start corpus provides a good initialization for the agentic keyframe selector.
- domain assumption SAM2-based mask propagation preserves inter-frame consistency after high-resolution segmentation on the selected keyframe.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearRCoT-Seg factorizes VRS into temporal video reasoning (TVR) and keyframe target perception (KTP) ... agentic keyframe selection module, initialized with a curated CoT-start corpus and refined by GRPO under task-aligned rewards
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearWe design a Hungarian algorithm-based reward to robustly handle multi-object scenarios
Reference graph
Works this paper leans on
-
[1]
Shuai Bai, Keqin Chen, Xuejing Liu, Jialin Wang, Wenbin Ge, Sibo Song, Kai Dang, Peng Wang, Shijie Wang, Jun Tang, et al. Qwen2. 5-vl technical report.arXiv preprint arXiv:2502.13923, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
Sule Bai, Mingxing Li, Yong Liu, Jing Tang, Haoji Zhang, Lei Sun, Xiangxiang Chu, and Yansong Tang. Univg-r1: Reasoning guided universal visual grounding with reinforcement learning.arXiv preprint arXiv:2505.14231, 2025
-
[3]
Zechen Bai, Tong He, Haiyang Mei, Pichao Wang, Ziteng Gao, Joya Chen, Lei Liu, Zheng Zhang, and Mike Z Shou. One token to seg them all: Language instructed reasoning seg- mentation in videos.Advances in Neural Information Processing Systems, 37:6833–6859, 2024
work page 2024
-
[4]
Mevis: A large-scale benchmark for video segmentation with motion expressions
Henghui Ding, Chang Liu, Shuting He, Xudong Jiang, and Chen Change Loy. Mevis: A large-scale benchmark for video segmentation with motion expressions. InProceedings of the IEEE/CVF international conference on computer vision, pages 2694–2703, 2023
work page 2023
-
[5]
Rongyao Fang, Chengqi Duan, Kun Wang, Linjiang Huang, Hao Li, Shilin Yan, Hao Tian, Xingyu Zeng, Rui Zhao, Jifeng Dai, et al. Got: Unleashing reasoning capability of multimodal large language model for visual generation and editing.arXiv preprint arXiv:2503.10639, 2025
-
[6]
Video-R1: Reinforcing Video Reasoning in MLLMs
Kaituo Feng, Kaixiong Gong, Bohao Li, Zonghao Guo, Yibing Wang, Tianshuo Peng, Junfei Wu, Xiaoying Zhang, Benyou Wang, and Xiangyu Yue. Video-r1: Reinforcing video reasoning in mllms.arXiv preprint arXiv:2503.21776, 2025
work page internal anchor Pith review arXiv 2025
-
[7]
Sitong Gong, Lu Zhang, Yunzhi Zhuge, Xu Jia, Pingping Zhang, and Huchuan Lu. Reinforcing video reasoning segmentation to think before it segments.arXiv preprint arXiv:2508.11538, 2025
-
[8]
The devil is in temporal token: High quality video reasoning segmentation
Sitong Gong, Yunzhi Zhuge, Lu Zhang, Zongxin Yang, Pingping Zhang, and Huchuan Lu. The devil is in temporal token: High quality video reasoning segmentation. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 29183–29192, 2025
work page 2025
-
[9]
DeepSeek-R1: Incentivizing Reasoning Capability in LLMs via Reinforcement Learning
Daya Guo, Dejian Yang, Haowei Zhang, Junxiao Song, Ruoyu Zhang, Runxin Xu, Qihao Zhu, Shirong Ma, Peiyi Wang, Xiao Bi, et al. Deepseek-r1: Incentivizing reasoning capability in llms via reinforcement learning.arXiv preprint arXiv:2501.12948, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[10]
Lora: Low-rank adaptation of large language models.ICLR, 1 (2):3, 2022
Edward J Hu, Yelong Shen, Phillip Wallis, Zeyuan Allen-Zhu, Yuanzhi Li, Shean Wang, Lu Wang, Weizhu Chen, et al. Lora: Low-rank adaptation of large language models.ICLR, 1 (2):3, 2022
work page 2022
-
[11]
Aaron Jaech, Adam Kalai, Adam Lerer, Adam Richardson, Ahmed El-Kishky, Aiden Low, Alec Helyar, Aleksander Madry, Alex Beutel, Alex Carney, et al. Openai o1 system card.arXiv preprint arXiv:2412.16720, 2024. 10
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[12]
Videochat-r1: Enhancing spatio-temporal perception via reinforcement fine-tuning,
Xinhao Li, Ziang Yan, Desen Meng, Lu Dong, Xiangyu Zeng, Yinan He, Yali Wang, Yu Qiao, Yi Wang, and Limin Wang. Videochat-r1: Enhancing spatio-temporal perception via reinforce- ment fine-tuning.arXiv preprint arXiv:2504.06958, 2025
-
[13]
Glus: Global-local reasoning unified into a single large language model for video segmentation
Lang Lin, Xueyang Yu, Ziqi Pang, and Yu-Xiong Wang. Glus: Global-local reasoning unified into a single large language model for video segmentation. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 8658–8667, 2025
work page 2025
-
[14]
Yuqi Liu, Bohao Peng, Zhisheng Zhong, Zihao Yue, Fanbin Lu, Bei Yu, and Jiaya Jia. Seg- zero: Reasoning-chain guided segmentation via cognitive reinforcement.arXiv preprint arXiv:2503.06520, 2025
-
[15]
Yuqi Liu, Tianyuan Qu, Zhisheng Zhong, Bohao Peng, Shu Liu, Bei Yu, and Jiaya Jia. Vision- reasoner: Unified visual perception and reasoning via reinforcement learning.arXiv preprint arXiv:2505.12081, 2025
-
[16]
Visual-RFT: Visual Reinforcement Fine-Tuning
Ziyu Liu, Zeyi Sun, Yuhang Zang, Xiaoyi Dong, Yuhang Cao, Haodong Duan, Dahua Lin, and Jiaqi Wang. Visual-rft: Visual reinforcement fine-tuning.arXiv preprint arXiv:2503.01785, 2025
work page internal anchor Pith review arXiv 2025
-
[17]
The 2017 DAVIS Challenge on Video Object Segmentation
Jordi Pont-Tuset, Federico Perazzi, Sergi Caelles, Pablo Arbeláez, Alex Sorkine-Hornung, and Luc Van Gool. The 2017 davis challenge on video object segmentation.arXiv preprint arXiv:1704.00675, 2017
work page internal anchor Pith review arXiv 2017
-
[18]
SAM 2: Segment Anything in Images and Videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman Rädle, Chloe Rolland, Laura Gustafson, et al. Sam 2: Segment anything in images and videos.arXiv preprint arXiv:2408.00714, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[19]
Urvos: Unified referring video object segmentation network with a large-scale benchmark
Seonguk Seo, Joon-Young Lee, and Bohyung Han. Urvos: Unified referring video object segmentation network with a large-scale benchmark. InComputer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part XV 16, pages 208–223. Springer, 2020
work page 2020
-
[20]
DeepSeekMath: Pushing the Limits of Mathematical Reasoning in Open Language Models
Zhihong Shao, Peiyi Wang, Qihao Zhu, Runxin Xu, Junxiao Song, Xiao Bi, Haowei Zhang, Mingchuan Zhang, YK Li, Yang Wu, et al. Deepseekmath: Pushing the limits of mathematical reasoning in open language models.arXiv preprint arXiv:2402.03300, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[21]
Hybridflow: A flexible and efficient rlhf framework
Guangming Sheng, Chi Zhang, Zilingfeng Ye, Xibin Wu, Wang Zhang, Ru Zhang, Yanghua Peng, Haibin Lin, and Chuan Wu. Hybridflow: A flexible and efficient rlhf framework. In Proceedings of the Twentieth European Conference on Computer Systems, pages 1279–1297, 2025
work page 2025
-
[22]
Richard S Sutton, Andrew G Barto, et al.Reinforcement learning: An introduction, volume 1. MIT press Cambridge, 1998
work page 1998
-
[23]
Pixelthink: Towards efficient chain-of-pixel reasoning.arXiv preprint arXiv:2505.23727, 2025
Song Wang, Gongfan Fang, Lingdong Kong, Xiangtai Li, Jianyun Xu, Sheng Yang, Qiang Li, Jianke Zhu, and Xinchao Wang. Pixelthink: Towards efficient chain-of-pixel reasoning.arXiv preprint arXiv:2505.23727, 2025
-
[24]
Time-r1: Post-training large vision language model for temporal video grounding,
Ye Wang, Ziheng Wang, Boshen Xu, Yang Du, Kejun Lin, Zihan Xiao, Zihao Yue, Jianzhong Ju, Liang Zhang, Dingyi Yang, et al. Time-r1: Post-training large vision language model for temporal video grounding.arXiv preprint arXiv:2503.13377, 2025
-
[25]
Cong Wei, Yujie Zhong, Haoxian Tan, Yong Liu, Zheng Zhao, Jie Hu, and Yujiu Yang. Hy- perseg: Towards universal visual segmentation with large language model.arXiv preprint arXiv:2411.17606, 2024
-
[26]
Instructseg: Unifying instructed visual segmentation with multi-modal large language models
Cong Wei, Yujie Zhong, Haoxian Tan, Yingsen Zeng, Yong Liu, Hongfa Wang, and Yujiu Yang. Instructseg: Unifying instructed visual segmentation with multi-modal large language models. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 20193–20203, 2025. 11
work page 2025
-
[27]
Gsva: Generalized segmentation via multimodal large language models
Zhuofan Xia, Dongchen Han, Yizeng Han, Xuran Pan, Shiji Song, and Gao Huang. Gsva: Generalized segmentation via multimodal large language models. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 3858–3869, 2024
work page 2024
-
[28]
Yicheng Xiao, Lin Song, Yukang Chen, Yingmin Luo, Yuxin Chen, Yukang Gan, Wei Huang, Xiu Li, Xiaojuan Qi, and Ying Shan. Mindomni: Unleashing reasoning generation in vision language models with rgpo.arXiv preprint arXiv:2505.13031, 2025
-
[29]
DanceGRPO: Unleashing GRPO on Visual Generation
Zeyue Xue, Jie Wu, Yu Gao, Fangyuan Kong, Lingting Zhu, Mengzhao Chen, Zhiheng Liu, Wei Liu, Qiushan Guo, Weilin Huang, et al. Dancegrpo: Unleashing grpo on visual generation. arXiv preprint arXiv:2505.07818, 2025
work page internal anchor Pith review arXiv 2025
-
[30]
Visa: Reasoning video object segmentation via large language models
Cilin Yan, Haochen Wang, Shilin Yan, Xiaolong Jiang, Yao Hu, Guoliang Kang, Weidi Xie, and Efstratios Gavves. Visa: Reasoning video object segmentation via large language models. In European Conference on Computer Vision, pages 98–115. Springer, 2024
work page 2024
-
[31]
Improving the Reasoning of Multi-Image Grounding in MLLMs via Reinforcement Learning
Bob Zhang, Haoran Li, Tao Zhang, Cilin Yan, Jiayin Cai, and Yanbin Hao. Improving the reasoning of multi-image grounding in mllms via reinforcement learning.arXiv preprint arXiv:2507.00748, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[32]
Villa: Video reasoning segmentation with large language model.arXiv preprint arXiv:2407.14500, 2024
Rongkun Zheng, Lu Qi, Xi Chen, Yi Wang, Kun Wang, Yu Qiao, and Hengshuang Zhao. Villa: Video reasoning segmentation with large language model.arXiv preprint arXiv:2407.14500, 2024
-
[33]
LlamaFactory: Unified Efficient Fine-Tuning of 100+ Language Models
Yaowei Zheng, Richong Zhang, Junhao Zhang, Yanhan Ye, Zheyan Luo, Zhangchi Feng, and Yongqiang Ma. Llamafactory: Unified efficient fine-tuning of 100+ language models.arXiv preprint arXiv:2403.13372, 2024
work page internal anchor Pith review arXiv 2024
-
[34]
Hao Zhong, Muzhi Zhu, Zongze Du, Zheng Huang, Canyu Zhao, Mingyu Liu, Wen Wang, Hao Chen, and Chunhua Shen. Omni-r1: Reinforcement learning for omnimodal reasoning via two-system collaboration.arXiv preprint arXiv:2505.20256, 2025
-
[35]
arXiv preprint arXiv:2312.17448 (2023)
Jiawen Zhu, Zhi-Qi Cheng, Jun-Yan He, Chenyang Li, Bin Luo, Huchuan Lu, Yifeng Geng, and Xuansong Xie. Tracking with human-intent reasoning.arXiv preprint arXiv:2312.17448, 2023. 12 <image> The above is a frame from a video, and the text description of the video is: "{Video_Description}". One or more objects are marked with red rectangles in each frame.Th...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.