Recognition: no theorem link
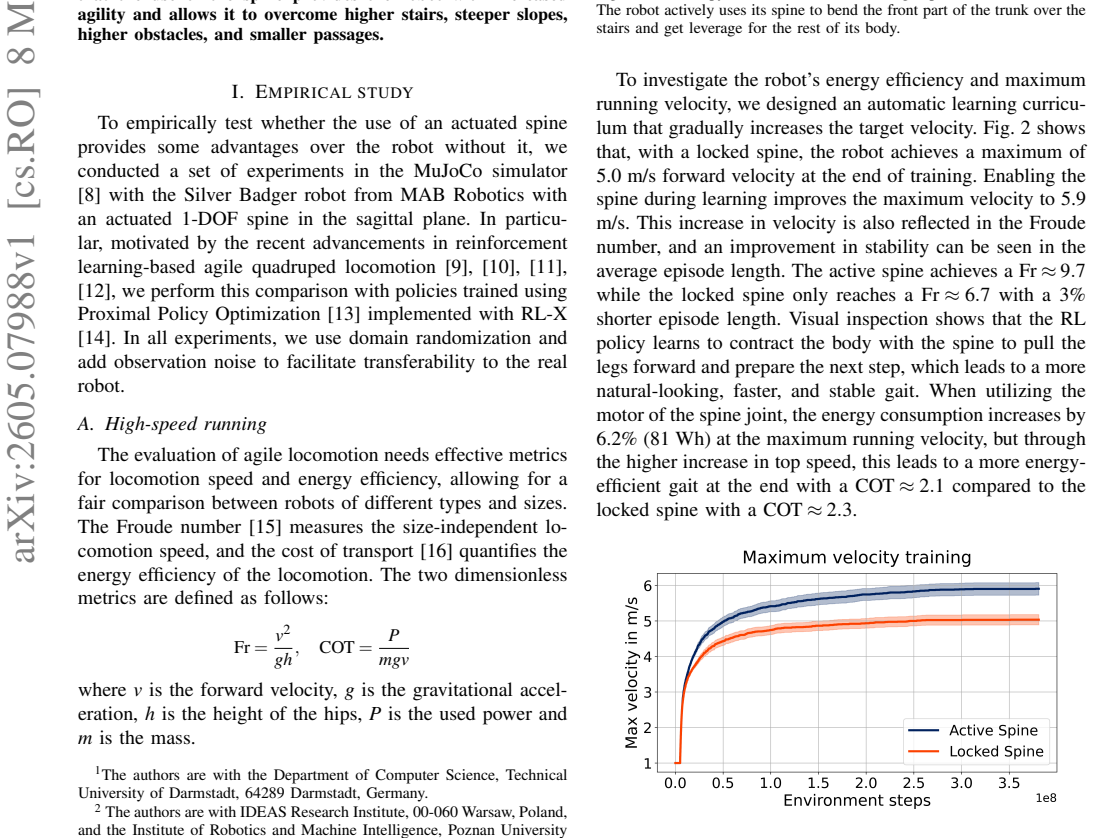
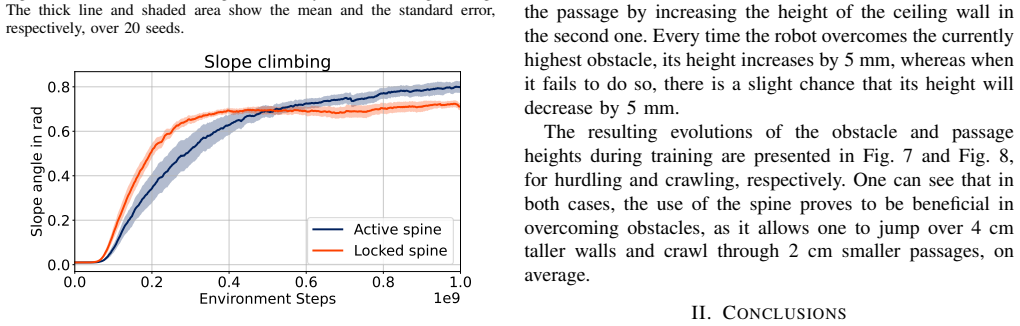
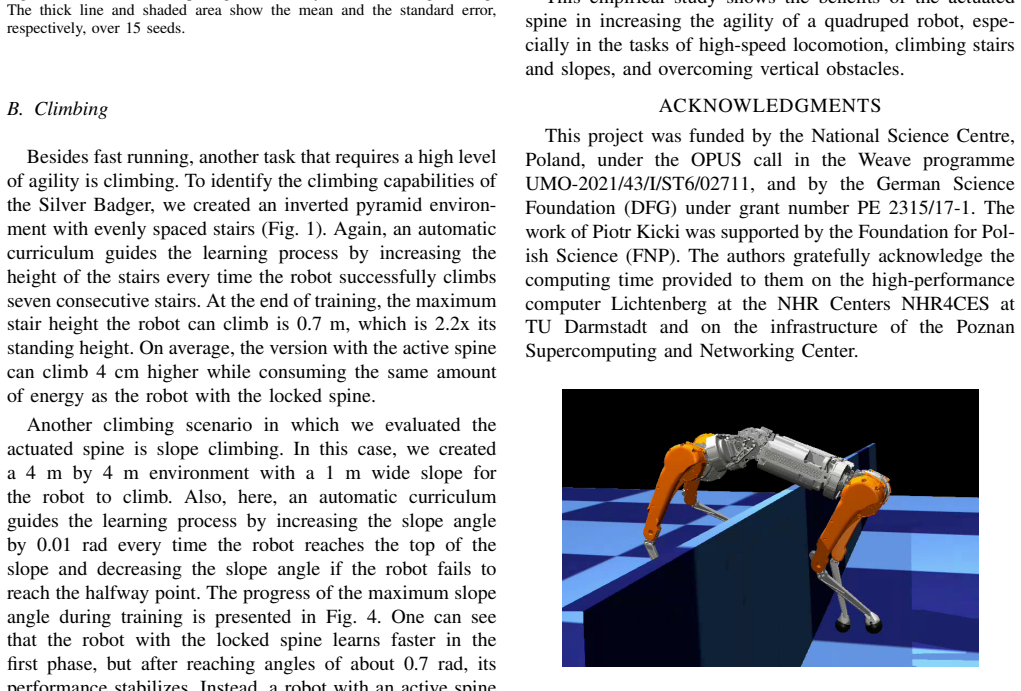
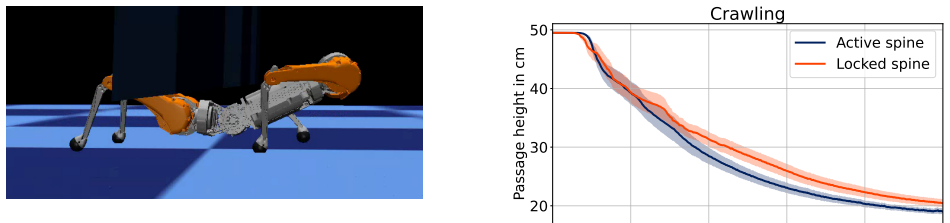
Evaluation of an Actuated Spine in Agile Quadruped Locomotion
Pith reviewed 2026-05-11 02:48 UTC · model grok-4.3
The pith
An actuated spine in a quadruped robot increases agility and lets it handle steeper slopes, higher stairs, and tighter spaces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The empirical evaluation shows that an actuated 1-DOF spine in the sagittal plane supplies increased agility, allowing the robot to overcome higher stairs, steeper slopes, higher obstacles, and smaller passages than a rigid-spine baseline in the same simulated scenarios.
What carries the argument
The actuated 1-DOF spine in the sagittal plane, added to the quadruped and incorporated into its locomotion controller.
If this is right
- The robot reaches higher forward speeds during running tasks.
- It clears taller stairs and steeper inclines without falling.
- It jumps over taller obstacles in hurdling scenarios.
- It fits through narrower openings during crawling.
Where Pith is reading between the lines
- A spine mechanism might reduce reliance on highly complex leg designs for rough-terrain robots.
- The same principle could be tested on other quadruped platforms or combined with different control methods such as model-predictive control.
- Hardware versions would need to address added mass, power consumption, and joint wear introduced by the spine.
Load-bearing premise
The simulation accurately reproduces the contact forces, actuator limits, and overall dynamics that would occur on the physical robot, so that any measured gains transfer without loss.
What would settle it
Transfer the trained controllers to the physical robot and measure whether it can still climb the same increased stair heights and slope angles that succeeded in simulation.
Figures



read the original abstract
The spine plays a crucial role in the dynamic locomotion of quadrupedal animals, improving the stability, speed, and efficiency of their gait, especially for fast-paced and highly agile movements. Therefore, the spine is also a promising and natural way to extend the capabilities of quadruped robots. This paper empirically investigates the benefits of an actuated spine for learning agile quadruped locomotion. We evaluate whether the use of the spine brings benefits in terms of high-speed running, climbing stairs, climbing high-angle slopes, hurdling, and crawling scenarios. We conducted an empirical study in MuJoCo simulation using the Silver Badger robot from MAB Robotics with an actuated 1-DOF spine in the sagittal plane. The obtained results show that the use of the spine provides the robot with increased agility and allows it to overcome higher stairs, steeper slopes, higher obstacles, and smaller passages.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an empirical evaluation in MuJoCo simulation of the benefits of adding an actuated 1-DOF sagittal spine to the Silver Badger quadruped robot for agile locomotion tasks. The central claim is that the spine increases the robot's agility, enabling it to overcome higher stairs, steeper slopes, higher obstacles, and smaller passages in scenarios such as high-speed running, stair climbing, slope climbing, hurdling, and crawling.
Significance. Should the simulation-based findings prove robust and transferable, the work would contribute to the understanding of how additional actuated degrees of freedom in the spine can enhance quadruped performance in challenging environments. It builds on biological analogies and offers a controlled comparison in simulation that could motivate further research and hardware implementations. The absence of quantitative details and real-robot experiments, however, constrains the current significance.
major comments (2)
- Results: The results are stated at a high level without quantitative metrics, statistical tests, baseline comparisons, or ablation studies. No specific values are given for the maximum stair height, slope angle, obstacle height, or passage width achieved with and without the spine, nor success rates or statistical significance, making it impossible to assess the magnitude or reliability of the claimed agility improvements.
- Experimental Setup: The evaluation relies exclusively on MuJoCo simulation without any hardware validation, sim-to-real transfer tests, or assessment of model fidelity for contact forces and actuator limits on the physical Silver Badger robot. This is load-bearing for the central claim that the spine provides the robot with increased agility in contact-rich tasks.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comments below and will revise the manuscript to improve the quantitative presentation of results and to better contextualize the simulation-based nature of the study.
read point-by-point responses
-
Referee: Results: The results are stated at a high level without quantitative metrics, statistical tests, baseline comparisons, or ablation studies. No specific values are given for the maximum stair height, slope angle, obstacle height, or passage width achieved with and without the spine, nor success rates or statistical significance, making it impossible to assess the magnitude or reliability of the claimed agility improvements.
Authors: We agree that the results section would be strengthened by explicit quantitative metrics and statistical analysis. In the revised manuscript we will add tables reporting the maximum stair height, slope angle, obstacle height, and passage width achieved in each scenario (with and without the actuated spine), success rates over repeated trials, and results of statistical significance tests. We will also include ablation studies comparing spine control policies against the rigid-spine baseline. revision: yes
-
Referee: Experimental Setup: The evaluation relies exclusively on MuJoCo simulation without any hardware validation, sim-to-real transfer tests, or assessment of model fidelity for contact forces and actuator limits on the physical Silver Badger robot. This is load-bearing for the central claim that the spine provides the robot with increased agility in contact-rich tasks.
Authors: The study is intentionally a controlled simulation experiment that isolates the effect of the 1-DOF sagittal spine under identical conditions. We acknowledge that the lack of hardware validation limits direct claims about physical robot performance. In the revision we will expand the discussion and limitations sections to address MuJoCo modeling assumptions for contacts and actuators, reference prior validation studies of the simulator for quadruped locomotion, and outline the steps required for future hardware transfer on the Silver Badger platform. revision: partial
Circularity Check
No circularity: purely empirical simulation study with independent metrics
full rationale
The paper conducts an empirical evaluation of an actuated spine in MuJoCo simulation for quadruped locomotion tasks (high-speed running, stairs, slopes, hurdling, crawling). Central claims rest on direct performance comparisons (e.g., success in overcoming higher obstacles) rather than any derivation, fitted parameter renamed as prediction, or self-citation chain. No equations, ansatzes, uniqueness theorems, or load-bearing self-references appear in the provided text. The study is self-contained against external benchmarks (task completion thresholds), with no reduction of outputs to inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Motions of the running cheetah and horse,
M. Hildebrand, “Motions of the running cheetah and horse,”Journal of Mammalogy, vol. 40, no. 4, pp. 481–495, 1959
work page 1959
-
[2]
Sagittal spine movements of small therian mammals during asymmetrical gaits,
N. Schilling and R. Hackert, “Sagittal spine movements of small therian mammals during asymmetrical gaits,”Journal of Experimental Biology, vol. 209, no. 19, pp. 3925–3939, 2006
work page 2006
-
[3]
Benefits of an active spine supported bounding locomotion with a small compliant quadruped robot,
M. Khoramshahi, A. Spr ¨owitz, A. Tuleu, M. N. Ahmadabadi, and A. J. Ijspeert, “Benefits of an active spine supported bounding locomotion with a small compliant quadruped robot,” in2013 IEEE international conference on robotics and automation. IEEE, 2013, pp. 3329–3334
work page 2013
-
[4]
D. J. Hyun, S. Seok, J. Lee, and S. Kim, “High speed trot- running: Implementation of a hierarchical controller using propriocep- tive impedance control on the mit cheetah,”The International Journal of Robotics Research, vol. 33, no. 11, pp. 1417–1445, 2014
work page 2014
-
[5]
High- speed running quadruped robot with a multi-joint spine adopting a 1dof closed-loop linkage,
O. Matsumoto, H. Tanaka, T. Kawasetsu, and K. Hosoda, “High- speed running quadruped robot with a multi-joint spine adopting a 1dof closed-loop linkage,”Frontiers in Robotics and AI, vol. 10, p. 1148816, 2023
work page 2023
-
[6]
Dynamic locomotion of a quadruped robot with active spine via model predictive control,
W. Li, Z. Zhou, and H. Cheng, “Dynamic locomotion of a quadruped robot with active spine via model predictive control,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 1185–1191
work page 2023
-
[7]
KLEIYN : A Quadruped Robot with an Active Waist for Both Loco- motion and Wall Climbing (in press),
K. Yoneda, K. Kawaharazuka, T. Suzuki, T. Hattori, and K. Okada, “KLEIYN : A Quadruped Robot with an Active Waist for Both Loco- motion and Wall Climbing (in press),” in2025 IEEE-RAS International Conference on Intelligent Robots and Systems (IROS), 2025
work page 2025
-
[8]
Mujoco: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “Mujoco: A physics engine for model-based control,” in2012 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2012, pp. 5026–5033
work page 2012
-
[9]
Sim-to-real: Learning agile locomotion for quadruped robots,
J. Tan, T. Zhang, E. Coumans, A. Iscen, Y . Bai, D. Hafner, S. Bo- hez, and V . Vanhoucke, “Sim-to-real: Learning agile locomotion for quadruped robots,” inProceedings of Robotics: Science and Systems, Pittsburgh, Pennsylvania, June 2018
work page 2018
-
[10]
Anymal parkour: Learning agile navigation for quadrupedal robots,
D. Hoeller, N. Rudin, D. Sako, and M. Hutter, “Anymal parkour: Learning agile navigation for quadrupedal robots,”Science Robotics, vol. 9, no. 88, p. eadi7566, 2024. [Online]. Available: https://www.science.org/doi/abs/10.1126/scirobotics.adi7566
-
[11]
N. Rudin, J. He, J. Aurand, and M. Hutter, “Parkour in the wild: Learning a general and extensible agile locomotion policy using 0.0 0.2 0.4 0.6 0.8 1.0 Environment Steps 1e9 20 30 40 50Passage height in cm Crawling Active spine Locked spine Fig. 8. The minimum height of the passage overcome by the robot during learning. The thick line and shaded area sho...
-
[12]
One policy to run them all: an end-to-end learning approach to multi-embodiment locomotion,
N. Bohlinger, G. Czechmanowski, M. Krupka, P. Kicki, K. Walas, J. Peters, and D. Tateo, “One policy to run them all: an end-to-end learning approach to multi-embodiment locomotion,” inConference on robot learning, 2024
work page 2024
-
[13]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[14]
Rl-x: A deep reinforcement learning library (not only) for robocup,
N. Bohlinger and K. Dorer, “Rl-x: A deep reinforcement learning library (not only) for robocup,” inRobot world cup. Springer, 2023, pp. 228–239
work page 2023
-
[15]
The gaits of bipedal and quadrupedal animals,
R. M. Alexander, “The gaits of bipedal and quadrupedal animals,”The International Journal of Robotics Research, vol. 3, no. 2, pp. 49–59, 1984
work page 1984
-
[16]
V . A. Tucker, “The energetic cost of moving about: walking and running are extremely inefficient forms of locomotion. much greater efficiency is achieved by birds, fish—and bicyclists,”American Scien- tist, vol. 63, no. 4, pp. 413–419, 1975
work page 1975
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.