Recognition: 2 theorem links
· Lean TheoremEntropic Value-at-Risk for Inter-Vehicle Collision in Platoons: Network- and Delay-Induced Bounds on Risk Due to Extreme Events
Pith reviewed 2026-05-11 02:38 UTC · model grok-4.3
The pith
The algebraic connectivity of a platoon communication network sets the upper bound on entropic value-at-risk for inter-vehicle collisions while the largest Laplacian eigenvalue sets the lower bound under time-delayed stochastic dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By expressing the inter-vehicle distance covariance in terms of the Laplacian eigenvalues of the communication network, we derive network-and time-delay-induced bounds on both the minimum inherent risk and the worst-case risk. Specifically, the algebraic connectivity dictates the maximum EVaR, while the largest Laplacian eigenvalue determines the minimum risk inherently induced by the network structure.
What carries the argument
Entropic value-at-risk (EVaR) of the inter-vehicle spacing random variable whose covariance is written as a sum over Laplacian eigenmodes weighted by delay-dependent transfer functions.
If this is right
- Platoon designers can rank candidate communication topologies by their algebraic connectivity to guarantee an upper limit on tail collision risk.
- Increasing the largest Laplacian eigenvalue tightens the lower bound on unavoidable risk, showing an inherent performance trade-off.
- The EVaR bounds remain valid for any linear feedback law that preserves the Laplacian structure, allowing direct comparison of control gains.
- Time delay enters the bounds through the roots of the characteristic equation, giving an explicit delay margin before risk exceeds a safety threshold.
- Numerical examples confirm that star and path graphs produce measurably different risk intervals consistent with their eigenvalue spreads.
Where Pith is reading between the lines
- The same eigenvalue bounds could be used to set minimum communication bandwidth requirements for a target risk level.
- If the linear model is only approximate, the derived bounds still supply a first-cut safety filter that can be tightened by later Monte-Carlo validation.
- The framework suggests checking whether the same Laplacian dependence appears in other multi-agent formations with delayed information exchange.
Load-bearing premise
The steady-state covariance of spacing errors can be written exactly as a function of the Laplacian eigenvalues under the assumed linear time-delayed stochastic dynamics.
What would settle it
A Monte-Carlo simulation or hardware experiment in which the measured EVaR of minimum inter-vehicle distance, computed over many realizations, lies outside the predicted interval when the algebraic connectivity or largest eigenvalue is varied while holding all other parameters fixed.
Figures


read the original abstract
Safe operation of connected vehicle platoons under stochastic disturbances and time-delayed dynamics requires accurate quantification of rare but dangerous events, such as inter-vehicle collisions. We propose a rigorous framework for quantifying the risk of inter-vehicle collisions in connected vehicle platoons subject to time-delayed stochastic dynamics. We adopt the \emph{entropic value-at-risk} (EVaR) as a conservative metric to capture \emph{risk due to extreme events}, highlighting its advantages over conventional Value-at-Risk (VaR) and Conditional Value-at-Risk (CVaR). By expressing the inter-vehicle distance covariance in terms of the Laplacian eigenvalues of the communication network, we derive \emph{network-and time-delay-induced bounds} on both the minimum inherent risk and the worst-case risk. Specifically, the algebraic connectivity dictates the maximum EVaR, while the largest Laplacian eigenvalue determines the minimum risk inherently induced by the network structure. Numerical simulations illustrate how network topology and time delay shape collision risk, offering actionable insights for the safe design of vehicle platoons operating under stochastic disturbances.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a framework for quantifying collision risk in connected vehicle platoons using Entropic Value-at-Risk (EVaR) under time-delayed stochastic dynamics. By relating the inter-vehicle distance covariance to the eigenvalues of the communication network's Laplacian matrix, the authors derive bounds on the inherent minimum risk and the worst-case risk. They claim that the algebraic connectivity (second smallest eigenvalue) determines the maximum EVaR, while the largest eigenvalue determines the minimum risk. Numerical examples illustrate the impact of network topology and time delays.
Significance. If the derivations hold without unverified approximations, the work could offer a useful spectral-graph approach to bounding extreme-event risks in platoons, informing topology design for safer operation. The choice of EVaR over VaR/CVaR is appropriate for conservative tail-risk assessment in safety-critical systems. The link between network eigenvalues and risk metrics is a potentially actionable contribution for connected-vehicle control.
major comments (2)
- [Abstract and covariance derivation section] Abstract and the derivation of network-induced EVaR bounds (around the claim following the covariance expression): the assertion that inter-vehicle distance covariance can be expressed directly in terms of Laplacian eigenvalues, yielding a clean separation where algebraic connectivity (λ_{2}) dictates maximum EVaR and largest eigenvalue (λₙ) dictates minimum inherent risk, does not automatically follow. Under the linear time-delayed stochastic dynamics, the system decouples into independent modes, but each mode obeys a stochastic delay differential equation whose stationary variance requires the delay Lyapunov equation or the frequency-domain integral ∫ |1/(jω + λ e^{-jωτ})|^{2} dω. This variance depends on both λ and τ through the characteristic equation, so the claimed eigenvalue-only bounds require additional (unstated) inequalities whose tightness is unverified and may mix delay and拓
- [EVaR bounds and simulations section] Section on EVaR bounds and numerical validation: the paper does not provide explicit verification or tightness analysis of any bounding steps used to separate the delay effects from the topology effects when obtaining the λ_{2}-max and λₙ-min claims. Without this, the central separation result remains unsubstantiated for general delays.
minor comments (2)
- [Preliminaries and EVaR definition] The notation for the EVaR risk parameter (often denoted α) is introduced but its precise mapping to the underlying probability level and its role in the platoon collision probability bound could be clarified for readers unfamiliar with entropic risk measures.
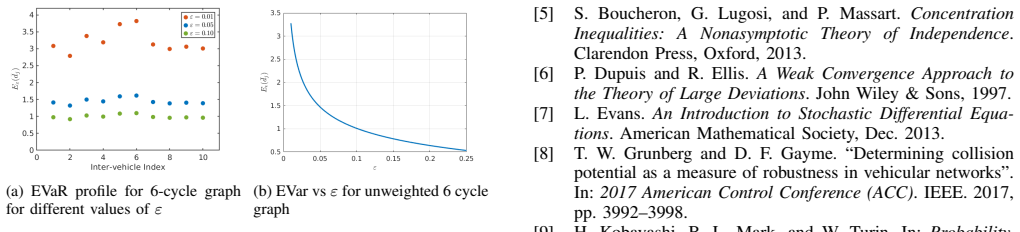
- [Numerical simulations] Figure captions and legends would benefit from explicit indication of which curves correspond to which network topologies (e.g., path vs. complete graph) and delay values to improve readability of the simulation results.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review of our manuscript. The comments correctly identify that the derivation of the network-induced bounds on EVaR requires explicit justification of the separation between topology and delay effects. We address each point below and commit to revisions that will clarify and substantiate the claims without altering the core results.
read point-by-point responses
-
Referee: [Abstract and covariance derivation section] Abstract and the derivation of network-induced EVaR bounds (around the claim following the covariance expression): the assertion that inter-vehicle distance covariance can be expressed directly in terms of Laplacian eigenvalues, yielding a clean separation where algebraic connectivity (λ_{2}) dictates maximum EVaR and largest eigenvalue (λₙ) dictates minimum inherent risk, does not automatically follow. Under the linear time-delayed stochastic dynamics, the system decouples into independent modes, but each mode obeys a stochastic delay differential equation whose stationary variance requires the delay Lyapunov equation or the frequency-domain integral ∫ |1/(jω + λ e^{-jωτ})|^{2} dω. This variance depends on both λ and τ through the characteristic equation, so the claimed eigenvalue-only bounds require additional (unstated) inequalities whose t
Authors: We appreciate the referee highlighting this subtlety. The modes decouple, and each scalar stochastic delay differential equation has a stationary variance obtained from the delay Lyapunov equation (or equivalently the frequency integral), which depends on both λ_i and τ. Our bounds are not claimed to be independent of τ; they are network-induced bounds for any fixed delay τ within the stability region. For fixed τ, the variance is a strictly decreasing function of λ (for λ > 0). This monotonicity, which follows from differentiating the frequency-domain integral with respect to λ or from properties of the Lyapunov solution, directly yields the separation: the worst-case (maximum) EVaR is attained at the smallest eigenvalue λ₂ (algebraic connectivity), while the best-case inherent (minimum) risk is attained at the largest eigenvalue λₙ. We will add an explicit statement and short proof of this monotonicity in the revised covariance section, together with the precise inequalities used. This makes the separation rigorous for any fixed τ and avoids mixing delay and topology effects. revision: yes
-
Referee: [EVaR bounds and simulations section] Section on EVaR bounds and numerical validation: the paper does not provide explicit verification or tightness analysis of any bounding steps used to separate the delay effects from the topology effects when obtaining the λ_{2}-max and λₙ-min claims. Without this, the central separation result remains unsubstantiated for general delays.
Authors: We agree that an explicit tightness analysis is necessary to fully substantiate the claims. In the revised manuscript we will insert a new subsection (or appendix) that (i) states the bounding inequalities and their derivation from the monotonicity property, (ii) analyzes tightness analytically (recovering the exact delay-free variance as τ → 0 and providing error bounds for small τ), and (iii) supplies numerical verification across multiple topologies (path, ring, complete graphs), platoon sizes, and delay values. For each case we will compare the eigenvalue-based EVaR bounds against the “ground-truth” EVaR obtained by numerically solving the delay Lyapunov equation for the actual set of eigenvalues. These additions will confirm that the λ₂-max and λₙ-min separation holds with quantifiable tightness for general delays inside the stability margin. revision: yes
Circularity Check
No circularity: EVaR bounds derived from spectral decomposition and risk metric definition
full rationale
The paper claims to express inter-vehicle distance covariance via Laplacian eigenvalues under linear time-delayed dynamics, then apply the EVaR definition to obtain network-induced bounds with algebraic connectivity controlling maximum EVaR and largest eigenvalue controlling minimum risk. This chain relies on standard modal decoupling of the system matrix and direct substitution into the EVaR formula; the resulting bounds are consequences of the spectral properties and the chosen risk measure rather than being presupposed by definition or by fitting. No self-citation is load-bearing for the central step, no parameter is fitted on a subset and renamed a prediction, and no ansatz is smuggled via prior work. The derivation remains self-contained against the stated linear stochastic model and EVaR axioms.
Axiom & Free-Parameter Ledger
free parameters (1)
- EVaR risk parameter
axioms (2)
- domain assumption Platoon dynamics are linear with additive stochastic disturbances and constant time delays.
- domain assumption Inter-vehicle distance statistics are fully captured by the communication graph Laplacian eigenvalues.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearσ²_zi = g²τ³/2π f(λ_i τ, βτ) with f(s1,s2)=∫ dr / [(s1 s2 − r² cos r)² + r²(s1 − r sin r)²]
-
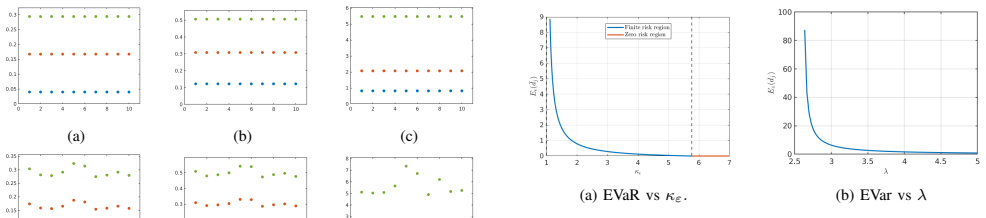
IndisputableMonolith/Foundation/DimensionForcing.leanalexander_duality_circle_linking unclearEn_ε ≤ inf Eε(d̄j) ≤ sup Eε(d̄j) ≤ E2_ε where bounds depend only on λ_n and λ₂
Reference graph
Works this paper leans on
-
[1]
Systemic risk and stability in financial networks
D. Acemoglu, A. Ozdaglar, and A. Tahbaz-Salehi. “Systemic risk and stability in financial networks”. In:American Eco- nomic Review105.2 (2015), pp. 564–608
work page 2015
-
[2]
Entropic Value-at-Risk: A New Coherent Risk Measure
A. Ahmadi-Javid. “Entropic Value-at-Risk: A New Coherent Risk Measure”. In:Journal of Optimization Theory and Applications155.3 (2012), pp. 1105–1123
work page 2012
-
[3]
P. Artzner, F. Delbaen, J. Eber, and D. Heath. “Coherent measures of risk”. In:Mathematical finance9.3 (1999), pp. 203–228
work page 1999
-
[4]
R. Bellman and K. L. Cooke.Differential - Difference Equations. Academic Press, 1963
work page 1963
-
[5]
S. Boucheron, G. Lugosi, and P. Massart.Concentration Inequalities: A Nonasymptotic Theory of Independence. Clarendon Press, Oxford, 2013
work page 2013
-
[6]
P. Dupuis and R. Ellis.A Weak Convergence Approach to the Theory of Large Deviations. John Wiley & Sons, 1997
work page 1997
-
[7]
Evans.An Introduction to Stochastic Differential Equa- tions
L. Evans.An Introduction to Stochastic Differential Equa- tions. American Mathematical Society, Dec. 2013
work page 2013
-
[8]
Determining collision potential as a measure of robustness in vehicular networks
T. W. Grunberg and D. F. Gayme. “Determining collision potential as a measure of robustness in vehicular networks”. In:2017 American Control Conference (ACC). IEEE. 2017, pp. 3992–3998
work page 2017
-
[9]
H. Kobayashi, B. L. Mark, and W. Turin. In:Probability, Random Processes, and Statistical Analysis: Applications to Communications, Signal Processing, Queueing Theory and Mathematical Finance. Cambridge University Press, 2011
work page 2011
-
[10]
Risk of Cascading Collisions in Network of Vehicles with Delayed Communi- cation
G. Liu, C. Somarakis, and N. Motee. “Risk of Cascading Collisions in Network of Vehicles with Delayed Communi- cation”. In:IEEE Transactions on Automatic Control(2025)
work page 2025
-
[11]
Risk of Cascading Failures in Time-Delayed Vehicle Platooning
G. Liu, C. Somarakis, and N. Motee. “Risk of Cascading Failures in Time-Delayed Vehicle Platooning”. In:2021 60th IEEE Conference on Decision and Control (CDC). IEEE. 2021, pp. 4841–4846
work page 2021
-
[12]
S. E. A. Mohammed.Stochastic functional differential equa- tions. V ol. 99. Pilman Advanced Publishing Program, 1984
work page 1984
-
[13]
Quantification of Distributionally Robust Risk of Cascade of Failures in Platoon of Vehicles
V . Pandey, G. Liu, A. Amini, and N. Motee. “Quantification of Distributionally Robust Risk of Cascade of Failures in Platoon of Vehicles”. In:2023 62nd IEEE Conference on Decision and Control (CDC). IEEE. 2023, pp. 7401–7406
work page 2023
-
[14]
Conditional value-at-risk for general loss distributions
R. T. Rockafellar and S. Uryasev. “Conditional value-at-risk for general loss distributions”. In:Journal of Banking and Finance26.7 (2002), pp. 1443–1471
work page 2002
-
[15]
Risk of Phase Incoherence in Noisy Power Networks With Delayed Feedback Control
C. Somarakis, Y . Ghaedsharaf, F. D ¨orfler, and N. Motee. “Risk of Phase Incoherence in Noisy Power Networks With Delayed Feedback Control”. In:IFAC-PapersOnLine. V ol. 51. 23. 2018, pp. 142–147
work page 2018
-
[16]
Aggregate fluctuations in time-delay linear consensus networks: A systemic risk perspective
C. Somarakis, Y . Ghaedsharaf, and N. Motee. “Aggregate fluctuations in time-delay linear consensus networks: A systemic risk perspective”. In:Proceedings of the American Control Conference. 2017
work page 2017
-
[17]
C. Somarakis, Y . Ghaedsharaf, and N. Motee. “Risk of Col- lision and Detachment in Vehicle Platooning: Time-Delay- Induced Limitations and Tradeoffs”. In:IEEE Transactions on Automatic Control65.8 (2020)
work page 2020
-
[18]
Van Mieghem.Graph spectra for complex networks
P. Van Mieghem.Graph spectra for complex networks. Cambridge University Press, 2010
work page 2010
-
[19]
W. Yu, G. Chen, and M. Cao. “Some necessary and sufficient conditions for second-order consensus in multi-agent dynam- ical systems”. In:Automatica46.6 (2010), pp. 1089–1095
work page 2010
-
[20]
Robustness of interdependent cyber-physical systems against cascading failures
Y . Zhang and O. Ya ˘gan. “Robustness of interdependent cyber-physical systems against cascading failures”. In:IEEE Transactions on Automatic Control65.2 (2019), pp. 711– 726. APPENDIX
work page 2019
-
[21]
Using the Chernoff bound for the left tail [5], for any s >0we obtain P ¯dj ≤α(δ) ≤e sα(δ)M ¯dj(−s)
Proof of Lemma 1:The proof follows the approach in [2], adapted to characterize collision risk arising from small inter-vehicle distances. Using the Chernoff bound for the left tail [5], for any s >0we obtain P ¯dj ≤α(δ) ≤e sα(δ)M ¯dj(−s). Letε∈(0,1). A sufficient condition forP( ¯dj ≤α(δ))≤ εis esα(δ)M ¯dj(−s)≤ε, which is equivalent to sα(δ) + lnM ¯dj(−s...
-
[22]
Proof of Proposition 1:The dual interpretation of EVaR follows from the Donsker–Varadhan variational for- mula. For any random variableX, lnE P[eX] = sup Q≪P {EQ[X]−D KL(Q∥P)}, whereD KL(·∥·)denotes the Kullback–Leibler divergence. Applying this identity withX=−s ¯dj yields lnE P[e−s ¯dj] = sup Q≪P −sE Q[ ¯dj]−D KL(Q∥P) . Substituting this expression into...
-
[23]
Proof of Lemma 2:The result follows from the stan- dard expression for the moment generating function of a Gaussian random variable; see [9].□
-
[24]
Solving the inner minimization overs: inf s>0 h s α(δ)−sd+ s2σ2 j 2 i givess ∗ = d−α(δ) σ2 j
Proof of Theorem 1:Using the definition of Entropic Value-at-Risk in Lemma 1 and the MGF from Lemma 2, we have Eε( ¯dj) = inf δ>0 ( δ inf s>0 h s α(δ)−sd+ s2σ2 j 2 i ≤lnε ) . Solving the inner minimization overs: inf s>0 h s α(δ)−sd+ s2σ2 j 2 i givess ∗ = d−α(δ) σ2 j . Substitutings ∗ back into the expression yields (α(δ)−d) 2 2σ2 j ≤ −lnε=⇒α(δ)−d≤ √ 2σ j...
-
[25]
Proof of Theorem 2:The proof follows from the monotonicity of the functionf. Using (11), we have c1f(λ nτ, βτ) nX k=2 (˜eT j qk)2 ≤σ 2 j ≤c 1f(λ2τ, βτ) nX k=2 (˜eT j qk)2, (21) wherec 1 =g 2 τ 3 2π . Noting that nX k=2 (˜eT j qk)2 =∥ ˜ej∥2 2 = 2, we obtain p 2c1f(λ nτ, βτ)≤σ j ≤ p 2c1f(λ2τ, βτ).(22) SinceE ε( ¯dj)is decreasing withκ ε =d ε/( √ 2σ j), andκ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.