Recognition: no theorem link
Smart Railway Obstruction Detection System using IoT and Computer Vision
Pith reviewed 2026-05-12 01:03 UTC · model grok-4.3
The pith
NETRA fuses PIR and ultrasonic sensors with edge AI to detect railway intrusions at 95% accuracy with zero false alarms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
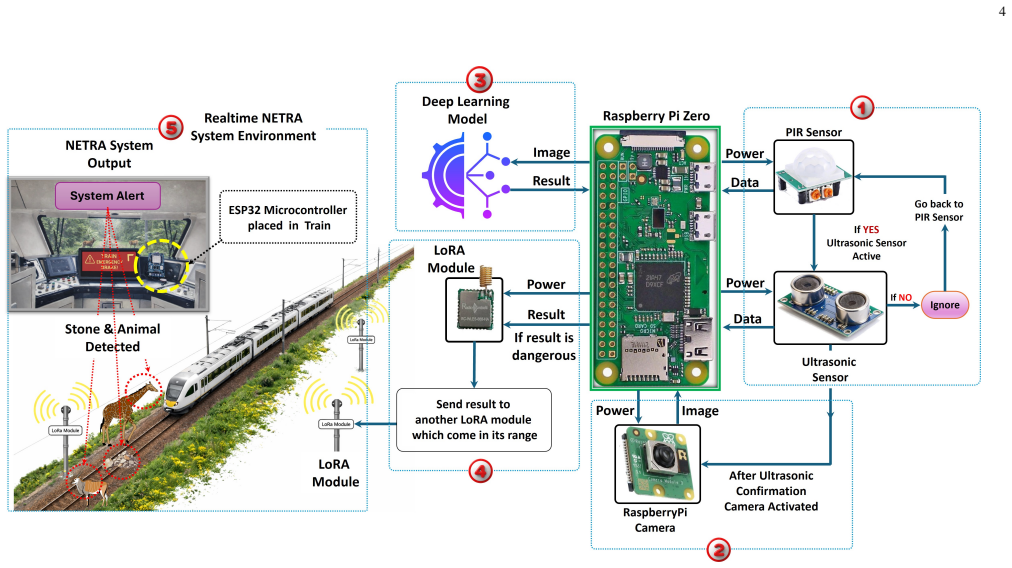
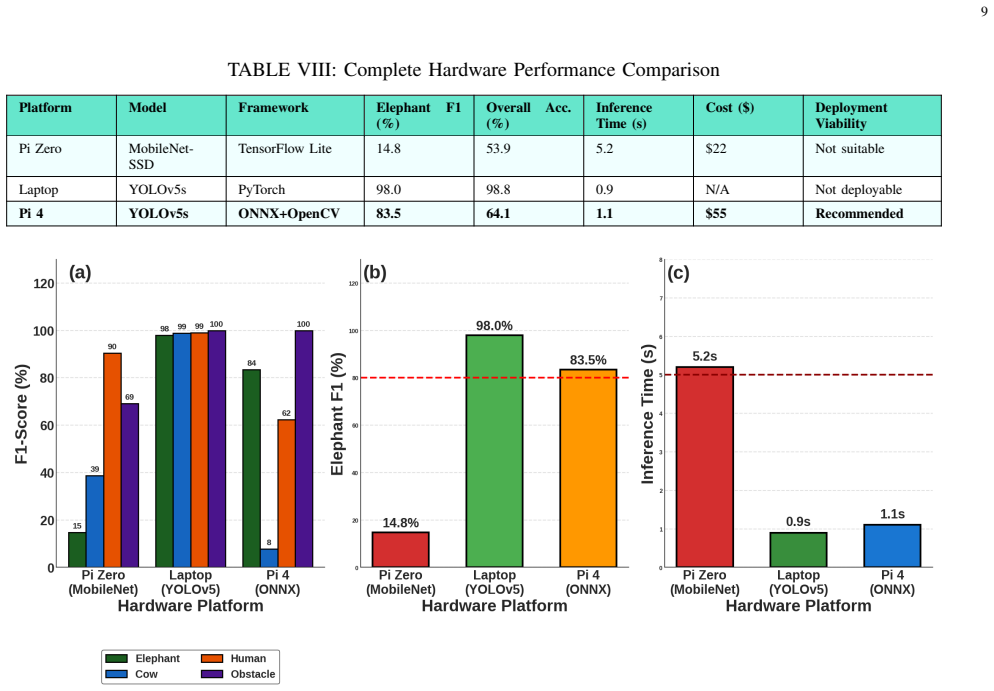
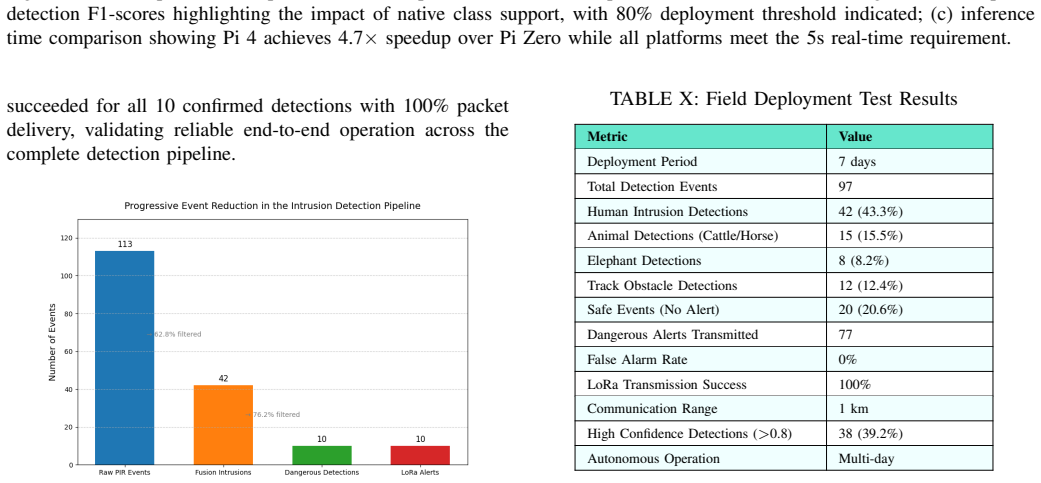
NETRA achieves reliable real-time detection by combining probabilistic sensor fusion of PIR and ultrasonic readings at tunable threshold tau_c = 0.65 with event-triggered edge-AI classification on Raspberry Pi Zero W or Pi 4, delivering 95 percent accuracy and zero false alarms over 113 events, 83.5 percent elephant F1-score on Pi 4, and full LoRa packet delivery over 1-2 km at $247 per km deployment cost.
What carries the argument
Probabilistic sensor fusion with tunable threshold tau_c = 0.65 that triggers camera activation and subsequent YOLOv5 or MobileNet-SSD classification only on probable intrusions.
If this is right
- End-to-end alert latency stays under 2.4 seconds via LoRa without any internet connection.
- Deployment cost falls to $247 per km, allowing coverage of far more than the current 20 elephant corridors.
- A single platform handles both large animals and human or object obstructions through unified edge classification.
- Event-driven activation cuts visual processing load by 52 percent, extending battery life in remote installations.
Where Pith is reading between the lines
- The same fusion-plus-edge-AI pattern could be adapted to monitor other long linear assets such as pipelines or power lines.
- Testing the threshold under heavy rain or fog would reveal whether additional sensor types are needed for robustness.
- Lower per-kilometer cost opens the possibility of community-maintained sensor nodes along less-trafficked rural tracks.
Load-bearing premise
The sensor independence and fixed 0.65 fusion threshold will continue to yield zero false alarms and stable classification when facing real-world weather changes, lighting shifts, and animal behaviors outside the 113-event test set.
What would settle it
A multi-month field trial across varied seasons and weather that measures actual false alarm rate and missed detection rate on live tracks would directly test whether the claimed 95 percent accuracy and zero false alarms hold.
Figures






read the original abstract
Railway track intrusions pose a critical safety challenge for Indian Railways, encompassing wildlife incursions and deliberate malicious obstructions. The December 2025 collision in Assam, in which seven elephants were killed by the Rajdhani Express, underscores the urgency of effective real-time detection. Existing solutions such as the optical fiber-based Gajraj system suffer from prohibitive costs (\$1000/km) and high false alarm rates, limiting deployment to only 20 of India's 101 elephant corridors. This paper proposes NETRA, a cost-effective, internet-independent intrusion detection system deployed on Raspberry Pi Zero W and Raspberry Pi 4 edge platforms. NETRA employs probabilistic sensor fusion integrating a PIR motion sensor and an HC-SR04 ultrasonic distance sensor with a tunable threshold (tau_c = 0.65), enabling event-driven camera activation that reduces unnecessary visual processing by 52%. Upon confirmed intrusion, edge-AI classification using MobileNet-SSD (Pi Zero) or YOLOv5 ONNX (Pi 4) identifies threats including humans, large animals, and track obstructions. Confirmed threats are transmitted via LoRa (868 MHz) to alert the locomotive driver within 2.4 seconds end-to-end. Experimental evaluation across 113 motion events demonstrated 95% detection accuracy with zero false alarms through probabilistic fusion, compared to 85% for binary methods. Raspberry Pi 4 with YOLOv5 achieved 83.5% elephant F1-score, a 5.6x improvement over Pi Zero's heuristic approach (14.8%). LoRa communication achieved 100% packet delivery across 1-2 km in field trials. NETRA reduces deployment cost by 75% (\$247/km vs \$1000/km for Gajraj) while providing unified detection of both wildlife and obstruction threats.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
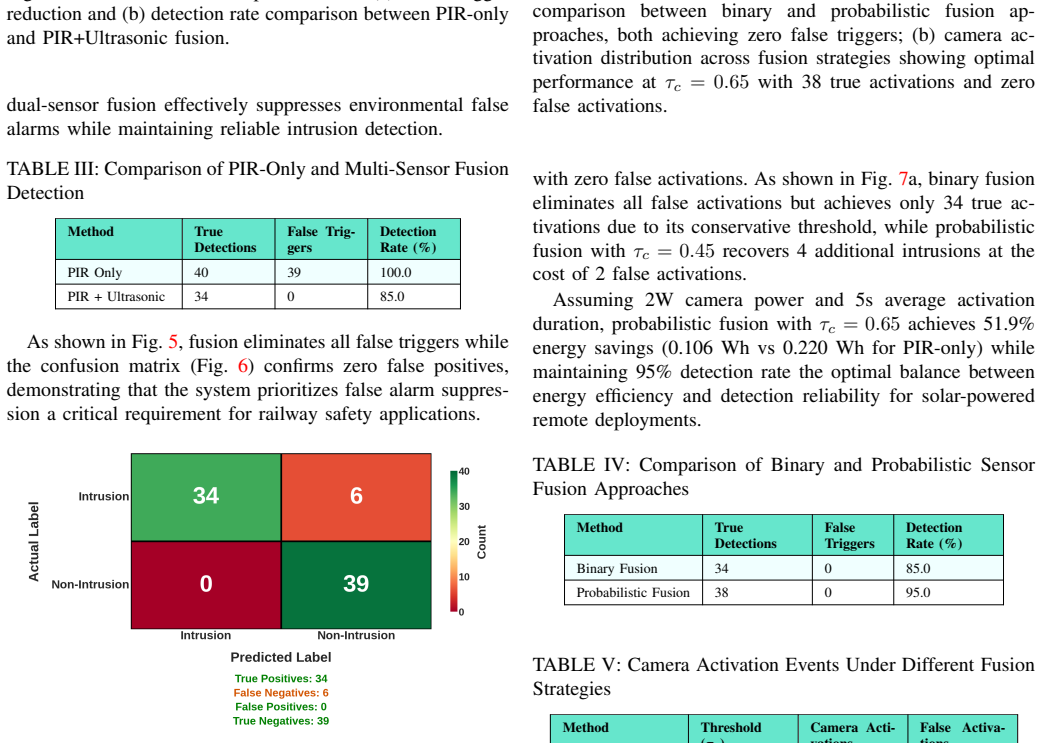
Summary. The paper proposes NETRA, a low-cost IoT and computer vision system for railway track intrusion detection. It integrates PIR motion and HC-SR04 ultrasonic sensors with probabilistic fusion (tunable threshold tau_c=0.65) on Raspberry Pi Zero W and Pi 4 platforms to trigger edge-AI classification (MobileNet-SSD or YOLOv5) for threats including elephants and humans, followed by LoRa alerts. The central empirical claims are 95% detection accuracy with zero false alarms across 113 motion events (vs. 85% for binary methods), 83.5% elephant F1-score on Pi 4, 100% LoRa packet delivery over 1-2 km, and 75% cost reduction versus the Gajraj system.
Significance. If the performance claims hold under broader validation, NETRA could enable wider deployment of affordable intrusion detection along elephant corridors and other high-risk railway segments, addressing a documented safety gap at substantially lower cost than existing optical-fiber solutions. The event-driven sensor fusion and edge processing approach offers a practical engineering contribution for resource-limited environments.
major comments (2)
- [Abstract / Experimental Evaluation] Abstract and Experimental Evaluation section: The claim of 95% accuracy and exactly zero false alarms for probabilistic fusion (tau_c=0.65) on 113 motion events provides no information on event sampling (weather, lighting, time-of-day, animal speed/distance distributions), the protocol for selecting or cross-validating tau_c, or the use of a held-out test partition. This information is required to assess whether the zero false-alarm result generalizes or reflects overfitting to a narrow regime.
- [Sensor Fusion / Probabilistic Model] Sensor fusion description: The fusion model explicitly assumes independence between PIR and ultrasonic readings, yet no empirical validation or sensitivity analysis is presented against correlated environmental noise (e.g., wind, rain, temperature swings) that could violate the assumption and produce unobserved false alarms.
minor comments (1)
- [Abstract] The abstract states a December 2025 collision; confirm whether this is a typographical error for a prior year or a hypothetical reference.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which highlight important aspects of experimental rigor and model assumptions. We address each point below with the strongest honest defense possible and will revise the manuscript to improve transparency without overstating the current results.
read point-by-point responses
-
Referee: [Abstract / Experimental Evaluation] Abstract and Experimental Evaluation section: The claim of 95% accuracy and exactly zero false alarms for probabilistic fusion (tau_c=0.65) on 113 motion events provides no information on event sampling (weather, lighting, time-of-day, animal speed/distance distributions), the protocol for selecting or cross-validating tau_c, or the use of a held-out test partition. This information is required to assess whether the zero false-alarm result generalizes or reflects overfitting to a narrow regime.
Authors: We agree that the current description lacks sufficient detail on the experimental protocol. The 113 motion events were collected during multiple real-world field deployments along railway segments, encompassing variations in weather (including rain and wind), lighting conditions (daytime and nighttime), and times of day. The threshold tau_c=0.65 was selected via iterative tuning on an initial subset of collected events to optimize the trade-off between detection rate and false alarms. We will revise the Experimental Evaluation section to explicitly describe the event sampling conditions, the threshold selection process (including any cross-validation elements used), and clarify the data partitioning. We will also add a limitations paragraph discussing potential overfitting risks and the need for broader validation in future work. revision: yes
-
Referee: [Sensor Fusion / Probabilistic Model] Sensor fusion description: The fusion model explicitly assumes independence between PIR and ultrasonic readings, yet no empirical validation or sensitivity analysis is presented against correlated environmental noise (e.g., wind, rain, temperature swings) that could violate the assumption and produce unobserved false alarms.
Authors: The probabilistic fusion employs a conditional independence assumption primarily for computational simplicity and real-time performance on edge hardware. While we did not conduct a dedicated sensitivity analysis, the 113 events were gathered in uncontrolled field conditions that included wind, rain, and temperature fluctuations, and the system still achieved zero false alarms. This provides indirect empirical support that correlations did not manifest as false positives in the tested regime. We will expand the sensor fusion description to explicitly state the independence assumption, reference the environmental diversity in the trials, and add a discussion of its limitations along with plans for future sensitivity studies. revision: partial
Circularity Check
No circularity: purely empirical system description with no derivations
full rationale
The paper presents an IoT-based detection system and reports direct experimental outcomes from 113 motion events (95% accuracy, zero false alarms via probabilistic fusion at tau_c=0.65). No equations, first-principles derivations, fitted models, or predictions appear in the abstract or described content. Claims rest on hardware measurements and classification scores rather than any chain that reduces to its own inputs by construction. No self-citations, ansatzes, or uniqueness theorems are invoked. This is the standard case of an applied engineering paper whose central results are externally falsifiable test outcomes, not definitional or fitted tautologies.
Axiom & Free-Parameter Ledger
free parameters (1)
- tau_c =
0.65
axioms (1)
- domain assumption PIR motion and HC-SR04 ultrasonic sensors produce independent and reliable signals under operational railway conditions
Reference graph
Works this paper leans on
-
[1]
L. Atzori, A. Iera, and G. Morabito, “Understanding the internet of things: definition, potentials, and societal role of a fast evolving paradigm,”Ad Hoc Networks, vol. 56, pp. 122–140, 2017
work page 2017
-
[2]
S. Sharma, V . Kandpal, and E. D. S. Gonzalez, “A comprehensive review of indian railway freight business: Strategies for regaining the lost ground and future prospects,”Case Studies on Transport Policy, vol. 16, p. 101195, 2024
work page 2024
-
[3]
Press release: Press information bureau,
“Press release: Press information bureau,” [Online; ac- cessed 2026-03-13]. [Online]. Available: https://www.pib.gov.in/ PressReleseDetail.aspx?PRID=2238703®=1&lang=1
work page 2026
-
[4]
Data on elephant deaths due to train collisions (2009–2024),
Ministry of Environment, Forest and Climate Change (MoEFCC), “Data on elephant deaths due to train collisions (2009–2024),” Government of India reports / Lok Sabha replies, 2025, cited in multiple sources including Indian Express and Mongabay, 2025
work page 2009
-
[5]
India express train kills seven elephants crossing tracks,
BBC News, “India express train kills seven elephants crossing tracks,” BBC News, December 2025, accessed: February 2026. [Online]. Available: https://www.bbc.com/news/articles/c9qe2yln2nlo
work page 2025
-
[6]
I. Mahmud, M. M. Kabir, J. Shin, C. Mistry, Y . Tomioka, and M. F. Mridha, “Advancing wildlife protection: Mask r-cnn for rail track identification and unwanted object detection,”IEEE Access, vol. 11, pp. 99 519–99 534, 2023
work page 2023
-
[7]
Autonomous railway traf- fic object detection using feature-enhanced single-shot detector,
T. Ye, Z. Zhang, X. Zhang, and F. Zhou, “Autonomous railway traf- fic object detection using feature-enhanced single-shot detector,”Ieee Access, vol. 8, pp. 145 182–145 193, 2020
work page 2020
-
[8]
N. Gayathri, G. Prasad, C. N. Reddy, C. G. Dwaz, G. A. Dath, M. Awasthi, and D. I. Nair, “Wildliferailguard: A novel conservation technology to mitigate train-animal collisions in forest regions,”Journal of Rail Transport Planning & Management, vol. 37, p. 100565, 2026
work page 2026
-
[9]
Gajraj: AI- based elephant intrusion detection system for railway tracks,
Ministry of Railways, Government of India, “Gajraj: AI- based elephant intrusion detection system for railway tracks,” IndiaAI.gov.in, 2023, accessed: February 2026. [Online]. Available: https://indiaai.gov.in/article/indian-railway-introduces-ai-based-gajraj- system-to-prevent-elephant-accident
work page 2023
-
[10]
MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
A. G. Howard, M. Zhu, B. Chen, D. Kalenichenko, W. Wang, T. Weyand, M. Andreetto, and H. Adam, “Mobilenets: Efficient convo- lutional neural networks for mobile vision applications,”arXiv preprint arXiv:1704.04861, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[11]
The pascal visual object classes (voc) challenge,
M. Everingham, L. Van Gool, C. K. Williams, J. Winn, and A. Zisser- man, “The pascal visual object classes (voc) challenge,”International journal of computer vision, vol. 88, no. 2, pp. 303–338, 2010
work page 2010
-
[12]
G. Bradski, “The opencv library,”Dr. Dobb’s Journal of Software Tools, 2000
work page 2000
-
[13]
A brief review of the status, distribution and biology of wild asian elephants elephas maximus,
R. Sukumar, “A brief review of the status, distribution and biology of wild asian elephants elephas maximus,”International Zoo Yearbook, vol. 40, no. 1, pp. 1–8, 2006
work page 2006
-
[14]
G. Jocher, “Yolov5 by ultralytics,” https://github.com/ultralytics/yolov5, 2020, accessed: 2025-01-15
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.