Recognition: 2 theorem links
· Lean TheoremDUET: Optimize Token-Budget Allocation for Reinforcement Learning with Verifiable Rewards
Pith reviewed 2026-05-12 01:53 UTC · model grok-4.3
The pith
Jointly deciding which prompts receive rollouts and when to stop each rollout improves reasoning accuracy and cuts training time under a fixed token budget.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
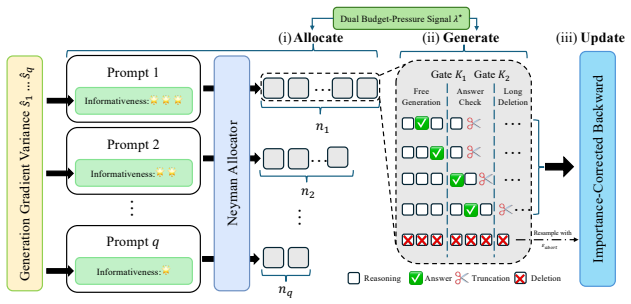
DUET improves both final model performance and wall-clock training speed by allocating a shared token budget across two decisions at once: how many rollouts to generate for each prompt and how many tokens to produce within each rollout.
What carries the argument
A dual-controlled token allocation layer that uses a pre-rollout surrogate to set rollout counts per prompt and a marker-gated abort rule with importance reweighting to truncate rollouts early.
If this is right
- The same token budget can be spent on fewer but higher-value generations and still produce a stronger policy update.
- Training wall time drops because many rollouts terminate before reaching maximum length.
- The performance gap over uniform-budget methods widens rather than shrinks when the overall budget is reduced.
- The method remains effective across different model sizes and across math, coding, and some scientific question-answering domains.
Where Pith is reading between the lines
- Token efficiency can be treated as an explicit optimization objective rather than an after-the-fact compression step.
- Similar dual-control logic might apply to other expensive sampling loops such as test-time search or synthetic data generation.
- The widening advantage at tighter budgets suggests that uniform full-length rollouts increasingly include low-value tokens as compute is limited.
Load-bearing premise
The surrogate ranks prompt usefulness accurately enough that the chosen rollout counts improve the learning signal more than uniform allocation would, and the early-abort rule does not distort the gradient estimates.
What would settle it
A controlled experiment in which the surrogate is replaced by random prompt ranking and the resulting accuracy or speedup disappears or reverses.
Figures


read the original abstract
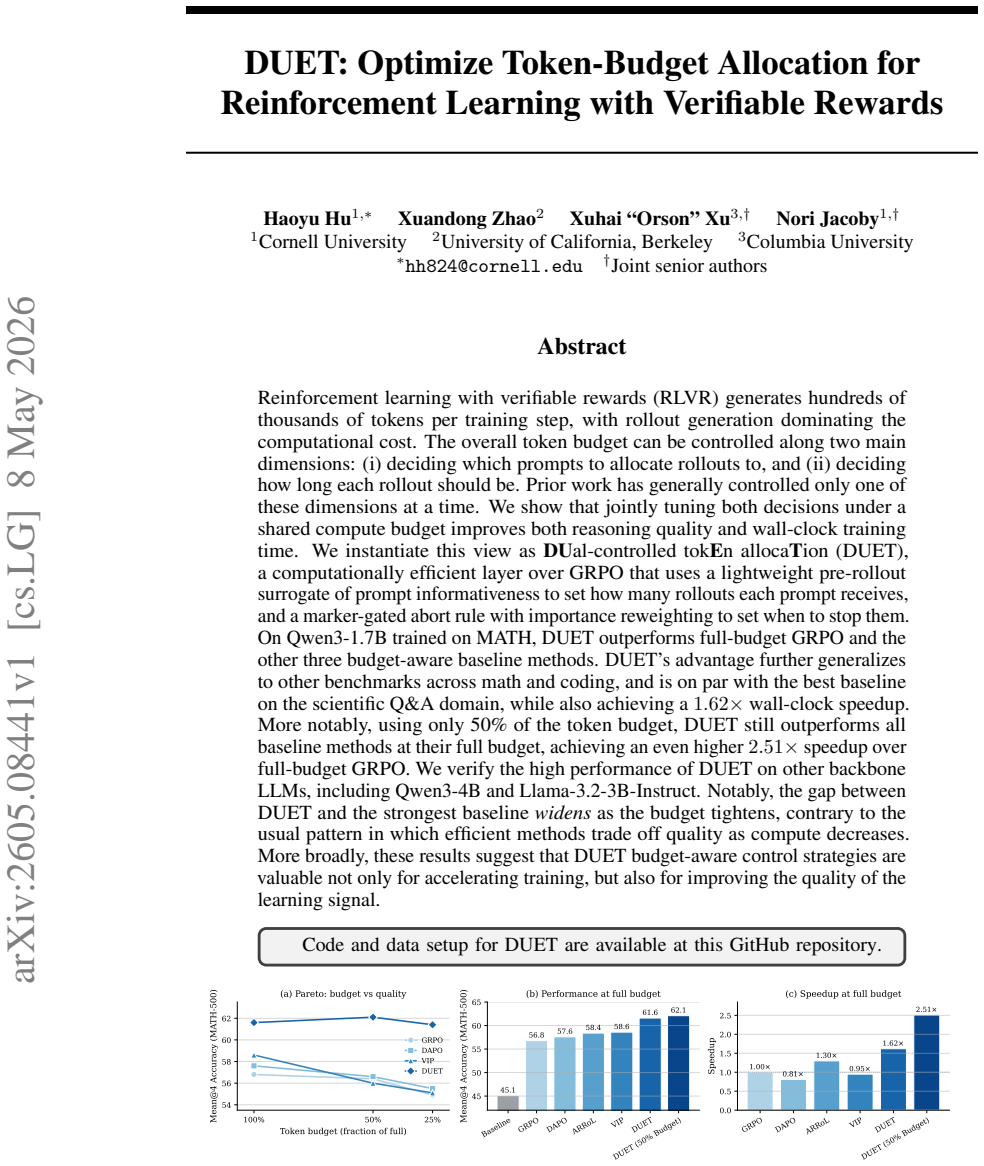
Reinforcement learning with verifiable rewards (RLVR) generates hundreds of thousands of tokens per training step, with rollout generation dominating the computational cost. The overall token budget can be controlled along two main dimensions: (i) deciding which prompts to allocate rollouts to, and (ii) deciding how long each rollout should be. Prior work has generally controlled only one of these dimensions at a time. We show that jointly tuning both decisions under a shared compute budget improves both reasoning quality and wall-clock training time. We instantiate this view as \textbf{DU}al-controlled tok\textbf{E}n alloca\textbf{T}ion (DUET), a computationally efficient layer over GRPO that uses a lightweight pre-rollout surrogate of prompt informativeness to set how many rollouts each prompt receives, and a marker-gated abort rule with importance reweighting to set when to stop them. On Qwen3-1.7B trained on MATH, DUET outperforms full-budget GRPO and the other three budget-aware baseline methods. DUET's advantage further generalizes to other benchmarks across math and coding, and is on par with the best baseline on the scientific Q\&A domain, while also achieving a $1.62\times$ wall-clock speedup. More notably, using only 50\% of the token budget, DUET still outperforms all baseline methods at their full budget, achieving an even higher $2.51\times$ speedup over full-budget GRPO. We verify the high performance of DUET on other backbone LLMs, including Qwen3-4B and Llama-3.2-3B-Instruct. Notably, the gap between DUET and the strongest baseline \emph{widens} as the budget tightens, contrary to the usual pattern in which efficient methods trade off quality as compute decreases. More broadly, these results suggest that DUET budget-aware control strategies are valuable not only for accelerating training, but also for improving the quality of the learning signal.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes DUET, a dual-controlled token allocation layer over GRPO for RL with verifiable rewards. It uses a lightweight pre-rollout surrogate to decide rollout counts per prompt and a marker-gated early abort rule with importance reweighting to control rollout lengths. On Qwen3-1.7B trained on MATH, DUET is reported to outperform full-budget GRPO and three other budget-aware baselines; at 50% token budget it still beats all full-budget baselines while delivering a 2.51× wall-clock speedup. The advantage generalizes to other math and coding benchmarks and is on par with the best baseline on scientific Q&A, with the performance gap widening as the budget tightens.
Significance. If the empirical results hold under rigorous controls, the work demonstrates that jointly optimizing prompt selection and rollout length under a shared token budget can simultaneously improve reasoning quality and training efficiency in RLVR, contrary to the usual efficiency-quality trade-off. The counter-intuitive widening of the gap at tighter budgets, if reproducible, would be a notable finding for scaling reasoning models.
major comments (2)
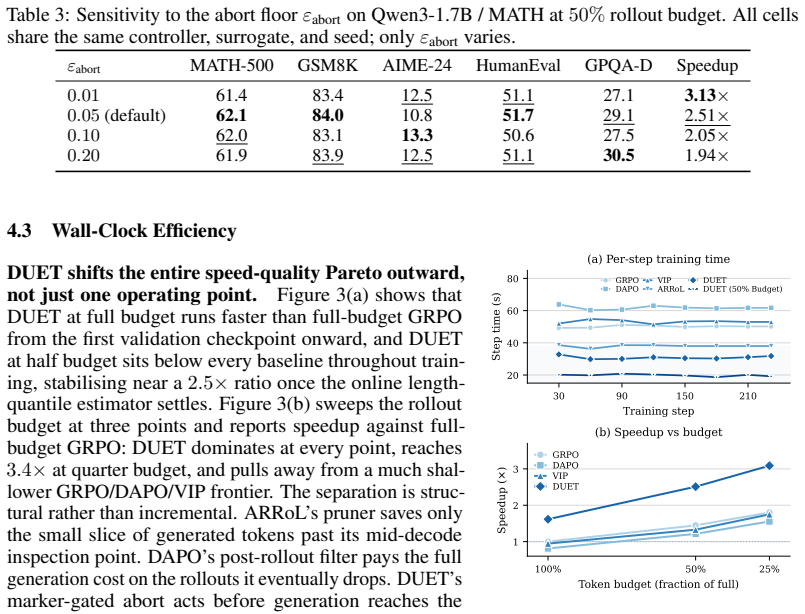
- [Experimental results] The experimental results (presumably §4 and associated tables) report clear outperformance on MATH and generalization but provide no details on the number of independent runs, error bars, statistical significance, or exact hyperparameter matching for the surrogate and abort rule. This absence makes it impossible to assess whether the 2.51× speedup and quality gains are robust or sensitive to implementation choices.
- [Method] The importance reweighting that accompanies the marker-gated abort rule (method section) is intended to correct for the induced distribution shift, yet no derivation or explicit formula is given showing that it fully accounts for the conditional probability of reaching the abort marker. If higher-order terms in the advantage estimator are omitted, the GRPO policy gradient becomes biased, which would directly undermine the central claim that the learning signal is preserved or improved.
minor comments (2)
- [Method] Notation for the surrogate model and the abort marker is introduced without a clear summary table relating symbols to their roles, making the dual-control description harder to follow on first reading.
- [Abstract] The abstract states that DUET is 'on par with the best baseline on the scientific Q&A domain' but does not name the domain or the specific baseline; this should be clarified for precision.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. We address each major comment below and will revise the manuscript to incorporate the requested clarifications and derivations.
read point-by-point responses
-
Referee: [Experimental results] The experimental results (presumably §4 and associated tables) report clear outperformance on MATH and generalization but provide no details on the number of independent runs, error bars, statistical significance, or exact hyperparameter matching for the surrogate and abort rule. This absence makes it impossible to assess whether the 2.51× speedup and quality gains are robust or sensitive to implementation choices.
Authors: We agree that reproducibility details are essential for assessing robustness. Our experiments used 5 independent runs per method and budget level with distinct random seeds. Error bars denote standard deviation across runs, and we will add them to all tables and figures. Statistical significance was evaluated via paired t-tests; we will report the resulting p-values. Hyperparameters for the surrogate and abort rule were selected via a small held-out validation set and are listed in Appendix C, with identical seeds applied across all baselines for fair comparison. We will expand §4 and add a reproducibility subsection detailing these choices. revision: yes
-
Referee: [Method] The importance reweighting that accompanies the marker-gated abort rule (method section) is intended to correct for the induced distribution shift, yet no derivation or explicit formula is given showing that it fully accounts for the conditional probability of reaching the abort marker. If higher-order terms in the advantage estimator are omitted, the GRPO policy gradient becomes biased, which would directly undermine the central claim that the learning signal is preserved or improved.
Authors: We acknowledge the need for an explicit derivation. The importance weight for a trajectory truncated at step t is w_t = 1 / ∏_{k=1}^t (1 - p(abort | s_k)), where p(abort | s_k) is the learned probability of hitting the marker at state s_k. This ratio exactly compensates for the conditional probability of reaching the abort point, so the reweighted advantage estimator remains unbiased under the original rollout distribution. Because the weight is applied directly to the advantage before the policy gradient, no higher-order terms are omitted and the GRPO estimator stays unbiased. We will insert this derivation and the closed-form expression into the revised Method section. revision: yes
Circularity Check
No circularity: empirical layering over GRPO with explicit reweighting
full rationale
The paper describes DUET as a computationally efficient layer over GRPO using a pre-rollout surrogate for prompt selection and a marker-gated abort rule with importance reweighting for rollout length. No equations or derivations are presented that reduce the claimed performance gains (e.g., outperformance at 50% budget) to quantities defined by the method's own fitted parameters or self-referential inputs. The central claims rest on experimental comparisons to baselines rather than any self-definitional or fitted-input reduction, rendering the approach self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Best arm identification in multi-armed bandits
Jean-Yves Audibert, Sébastien Bubeck, and Rémi Munos. Best arm identification in multi-armed bandits. InConference on Learning Theory (COLT), 2010
work page 2010
-
[2]
Adaptive stratified sampling for Monte-Carlo integration of differentiable functions
Alexandra Carpentier and Rémi Munos. Adaptive stratified sampling for Monte-Carlo integration of differentiable functions. InAdvances in Neural Information Processing Systems, 2012. arXiv:1210.5345
-
[3]
Chun-Hung Chen, Jianwu Lin, Enver Yücesan, and Stephen E. Chick. Simulation budget allocation for further enhancing the efficiency of ordinal optimization.Discrete Event Dynamic Systems, 10(3):251–270, 2000
work page 2000
-
[4]
Evaluating Large Language Models Trained on Code
Mark Chen, Jerry Tworek, Heewoo Jun, Qiming Yuan, Henrique Ponde de Oliveira Pinto, Jared Kaplan, Harri Edwards, Yuri Burda, Nicholas Joseph, Greg Brockman, et al. Evaluating large language models trained on code.arXiv preprint arXiv:2107.03374, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[5]
Minghan Chen, Guikun Chen, Wenguan Wang, and Yi Yang. SEED-GRPO: Semantic entropy enhanced GRPO for uncertainty-aware policy optimization.arXiv preprint arXiv:2505.12346, 2025
-
[6]
Training Verifiers to Solve Math Word Problems
Karl Cobbe, Vineet Kosaraju, Mohammad Bavarian, Mark Chen, Heewoo Jun, Lukasz Kaiser, Matthias Plappert, Jerry Tworek, Jacob Hilton, Reiichiro Nakano, Christopher Hesse, and John Schulman. Training verifiers to solve math word problems.arXiv preprint arXiv:2110.14168, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[7]
Eyal Even-Dar, Shie Mannor, and Yishay Mansour. Action elimination and stopping conditions for the multi-armed bandit and reinforcement learning problems.Journal of Machine Learning Research, 7: 1079–1105, 2006
work page 2006
-
[8]
Yangyi Fang, Jiaye Lin, Xiaoliang Fu, Cong Qin, Haolin Shi, Chaowen Hu, Lu Pan, Ke Zeng, and Xunliang Cai. How to allocate, how to learn? Dynamic rollout allocation and advantage modulation for policy optimization.arXiv preprint arXiv:2602.19208, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[9]
Peter W. Glynn and Ward Whitt. The asymptotic efficiency of simulation estimators.Operations Research, 40(3):505–520, 1992
work page 1992
-
[10]
Aaron Grattafiori, Abhimanyu Dubey, Abhinav Jauhri, et al. The Llama 3 herd of models.arXiv preprint arXiv:2407.21783, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[11]
DeepSeek-R1: Incentivizing Reasoning Capability in LLMs via Reinforcement Learning
Daya Guo, Dejian Yang, Haowei Zhang, Junxiao Song, Peiyi Wang, Qihao Zhu, Runxin Xu, et al. DeepSeek-R1 incentivizes reasoning in LLMs through reinforcement learning.Nature, 645:633–638, 2025. doi: 10.1038/s41586-025-09422-z. arXiv:2501.12948
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1038/s41586-025-09422-z 2025
-
[12]
Measuring Mathematical Problem Solving With the MATH Dataset
Dan Hendrycks, Collin Burns, Saurav Kadavath, Akul Arora, Steven Basart, Eric Tang, Dawn Song, and Jacob Steinhardt. Measuring mathematical problem solving with the MATH dataset. InAdvances in Neural Information Processing Systems Track on Datasets and Benchmarks, 2021. arXiv:2103.03874
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[13]
Training Compute-Optimal Large Language Models
Jordan Hoffmann, Sebastian Borgeaud, Arthur Mensch, et al. Training compute-optimal large language models.arXiv preprint arXiv:2203.15556, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[14]
Open-Reasoner-Zero: An Open Source Approach to Scaling Up Reinforcement Learning on the Base Model
Jingcheng Hu, Yinmin Zhang, Qi Han, Daxin Jiang, Xiangyu Zhang, and Heung-Yeung Shum. Open- Reasoner-Zero: An open source approach to scaling up reinforcement learning on the base model.arXiv preprint arXiv:2503.24290, 2025
work page internal anchor Pith review arXiv 2025
-
[15]
Doubly robust off-policy value evaluation for reinforcement learning
Nan Jiang and Lihong Li. Doubly robust off-policy value evaluation for reinforcement learning. In Proceedings of the 33rd International Conference on Machine Learning, volume 48, pages 652–661, 2016. arXiv:1511.03722
-
[16]
Scaling Laws for Neural Language Models
Jared Kaplan, Sam McCandlish, Tom Henighan, Tom B. Brown, Benjamin Chess, Rewon Child, Scott Gray, Alec Radford, Jeffrey Wu, and Dario Amodei. Scaling laws for neural language models.arXiv preprint arXiv:2001.08361, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2001
-
[17]
Efficient Memory Management for Large Language Model Serving with PagedAttention
Woosuk Kwon, Zhuohan Li, Siyuan Zhuang, Ying Sheng, Lianmin Zheng, Cody Hao Yu, Joseph E. Gonzalez, Hao Zhang, and Ion Stoica. Efficient memory management for large language model serving with PagedAttention. InProceedings of the 29th Symposium on Operating Systems Principles, 2023. arXiv:2309.06180
work page internal anchor Pith review arXiv 2023
-
[18]
Fast inference from transformers via speculative decoding
Yaniv Leviathan, Matan Kalman, and Yossi Matias. Fast inference from transformers via speculative decoding. InProceedings of the 40th International Conference on Machine Learning, volume 202, pages 19274–19286, 2023. 10
work page 2023
-
[19]
Xuefeng Li, Haoyang Zou, and Pengfei Liu. LIMR: Less is more for RL scaling.arXiv preprint arXiv:2502.11886, 2025
-
[20]
Breaking the curse of horizon: Infinite-horizon off-policy estimation
Qiang Liu, Lihong Li, Ziyang Tang, and Dengyong Zhou. Breaking the curse of horizon: Infinite-horizon off-policy estimation. InAdvances in Neural Information Processing Systems, 2018. arXiv:1810.12429
-
[21]
Niklas Muennighoff, Zitong Yang, Weijia Shi, Xiang Lisa Li, Li Fei-Fei, Hannaneh Hajishirzi, Luke Zettlemoyer, Percy Liang, Emmanuel Candès, and Tatsunori Hashimoto. s1: Simple test-time scaling. arXiv preprint arXiv:2501.19393, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[22]
Jerzy Neyman. On the two different aspects of the representative method: the method of stratified sampling and the method of purposive selection.Journal of the Royal Statistical Society, 97(4):558–625, 1934
work page 1934
-
[23]
Adaptive rollout allocation for online reinforcement learning with verifiable rewards, 2026
Hieu Trung Nguyen, Bao Nguyen, Wenao Ma, Yuzhi Zhao, Ruifeng She, and Viet Anh Nguyen. Adaptive rollout allocation for online reinforcement learning with verifiable rewards. InInternational Conference on Learning Representations, 2026. arXiv:2602.01601
-
[24]
Owen.Monte Carlo Theory, Methods and Examples
Art B. Owen.Monte Carlo Theory, Methods and Examples. 2013. Online manuscript, Stanford University
work page 2013
-
[25]
Carbon Emissions and Large Neural Network Training
David Patterson, Joseph Gonzalez, Quoc Le, Chen Liang, Lluis-Miquel Munguia, Daniel Rothchild, David So, Maud Texier, and Jeff Dean. Carbon emissions and large neural network training.arXiv preprint arXiv:2104.10350, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[26]
David Rein, Betty Li Hou, Asa Cooper Stickland, Jackson Petty, Richard Yuanzhe Pang, Julien Dirani, Julian Michael, and Samuel R. Bowman. GPQA: A graduate-level Google-proof Q&A benchmark.arXiv preprint arXiv:2311.12022, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[27]
Roy Schwartz, Jesse Dodge, Noah A. Smith, and Oren Etzioni. Green AI.Communications of the ACM, 63(12):54–63, 2020
work page 2020
-
[28]
Zhihong Shao, Peiyi Wang, Qihao Zhu, Runxin Xu, Junxiao Song, Xiao Bi, Haowei Zhang, Mingchuan Zhang, Y . K. Li, Y . Wu, and Daya Guo. DeepSeekMath: Pushing the limits of mathematical reasoning in open language models.arXiv preprint arXiv:2402.03300, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[29]
Hybridflow: A flexible and efficient rlhf framework
Guangming Sheng, Chi Zhang, Zilingfeng Ye, Xibin Wu, Wang Zhang, Ru Zhang, Yanghua Peng, Haibin Lin, and Chuan Wu. HybridFlow: A flexible and efficient RLHF framework. InProceedings of the Twentieth European Conference on Computer Systems, pages 1279–1297. ACM, 2025. doi: 10.1145/3689031.3696075. arXiv:2409.19256
-
[30]
Scaling LLM Test-Time Compute Optimally can be More Effective than Scaling Model Parameters
Charlie Victor Snell, Jaehoon Lee, Kelvin Xu, and Aviral Kumar. Scaling LLM test-time compute optimally can be more effective than scaling parameters for reasoning. InInternational Conference on Learning Representations, 2025. arXiv:2408.03314
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[31]
Energy and policy considerations for deep learning in NLP
Emma Strubell, Ananya Ganesh, and Andrew McCallum. Energy and policy considerations for deep learning in NLP. InProceedings of the 57th Annual Meeting of the Association for Computational Linguistics (ACL), pages 3645–3650, 2019
work page 2019
-
[32]
The self-normalized estimator for counterfactual learning
Adith Swaminathan and Thorsten Joachims. The self-normalized estimator for counterfactual learning. In Advances in Neural Information Processing Systems, 2015
work page 2015
-
[33]
Philip S. Thomas and Emma Brunskill. Data-efficient off-policy policy evaluation for reinforcement learning. InProceedings of the 33rd International Conference on Machine Learning, volume 48, pages 2139–2148, 2016. arXiv:1604.00923
-
[34]
Reinforcement learning for reasoning in large language models with one training example
Yiping Wang, Qing Yang, Zhiyuan Zeng, Liliang Ren, Liyuan Liu, Baolin Peng, Hao Cheng, Xuehai He, Kuan Wang, Jianfeng Gao, Weizhu Chen, Shuohang Wang, Simon Shaolei Du, and Yelong Shen. Reinforcement learning for reasoning in large language models with one training example. InAdvances in Neural Information Processing Systems (NeurIPS), 2025
work page 2025
-
[35]
Light-r1: Curriculum sft, dpo and rl for long cot from scratch and beyond
Liang Wen, Yunke Cai, Fenrui Xiao, Xin He, Qi An, Zhenyu Duan, Yimin Du, Junchen Liu, Lifu Tang, Xiaowei Lv, Haosheng Zou, Yongchao Deng, Shousheng Jia, and Xiangzheng Zhang. Light-R1: Curriculum SFT, DPO and RL for long CoT from scratch and beyond.arXiv preprint arXiv:2503.10460, 2025
-
[36]
Violet Xiang, Chase Blagden, Rafael Rafailov, Nathan Lile, Sang Truong, Chelsea Finn, and Nick Haber. Just enough thinking: Efficient reasoning with adaptive length penalties reinforcement learning.arXiv preprint arXiv:2506.05256, 2025. 11
-
[37]
Haobo Xu, Sirui Chen, Ruizhong Qiu, Yuchen Yan, Chen Luo, Monica Cheng, Jingrui He, and Hang- hang Tong. Prune as you generate: Online rollout pruning for faster and better RLVR.arXiv preprint arXiv:2603.24840, 2026
-
[38]
An Yang, Anfeng Li, Baosong Yang, Beichen Zhang, Binyuan Hui, Bo Zheng, Bowen Yu, Chang Gao, Chengen Huang, Chenxu Lv, Chujie Zheng, Dayiheng Liu, Fan Zhou, Fei Huang, Feng Hu, Hao Ge, Haoran Wei, Huan Lin, Jialong Tang, Jian Yang, Jianhong Tu, Jianwei Zhang, Jianxin Yang, Jiaxi Yang, Jing Zhou, Jingren Zhou, Junyang Lin, Kai Dang, Keqin Bao, Kexin Yang, ...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[39]
LIMO: Less is more for reasoning
Yixin Ye, Zhen Huang, Yang Xiao, Ethan Chern, Shijie Xia, and Pengfei Liu. LIMO: Less is more for reasoning. InConference on Language Modeling (COLM), 2025
work page 2025
-
[40]
DAPO: An Open-Source LLM Reinforcement Learning System at Scale
Qiying Yu, Zheng Zhang, Ruofei Zhu, et al. DAPO: An open-source LLM reinforcement learning system at scale.arXiv preprint arXiv:2503.14476, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[41]
Efficient rl training for reasoning models via length-aware optimization
Danlong Yuan, Tian Xie, Shaohan Huang, Zhuocheng Gong, Huishuai Zhang, Chong Luo, Furu Wei, and Dongyan Zhao. Shorten after you’re right: Lazy length penalties for reasoning RL.arXiv preprint arXiv:2505.12284, 2025
-
[42]
SimpleRL-Zoo: Investigating and Taming Zero Reinforcement Learning for Open Base Models in the Wild
Weihao Zeng, Yuzhen Huang, Qian Liu, Wei Liu, Keqing He, Zejun Ma, and Junxian He. SimpleRL-Zoo: Investigating and taming zero reinforcement learning for open base models in the wild. InConference on Language Modeling (COLM), 2025. arXiv:2503.18892
work page internal anchor Pith review arXiv 2025
-
[43]
Bartoldson, Bhavya Kailkhura, Fan Lai, Jiawei Zhao, and Beidi Chen
Haizhong Zheng, Yang Zhou, Brian R. Bartoldson, Bhavya Kailkhura, Fan Lai, Jiawei Zhao, and Beidi Chen. Act only when it pays: Efficient reinforcement learning for LLM reasoning via selective rollouts. arXiv preprint arXiv:2506.02177, 2025. 12 A Appendix A.1 Related Work Budget-Constrained Policy-Gradient Estimation.Stratified importance sampling with per...
-
[44]
** Add the first two numbers :** \[ 139 + 27 = 166 \]
-
[45]
** Add the third number to the result :** \[ 166 + 23 = 189 \]
-
[46]
** Add the fourth number to the result :** \[ 189 + 11 = 200 \] So , the final answer is : \[ \ boxed {200} \] 25 Level 5 — Precalculus (math-train-precalculus-37, gold answerBA=AB) Prompt Let \ mathbf { A } and \ mathbf { B } be matrices such that \ mathbf { A } + \ mathbf { B } = \ mathbf { A }\ mathbf { B }. If \ mathbf { A }\ mathbf { B } = ((20/3 , 4...
-
[47]
Start with the given e qu ati on
-
[48]
Mul ti pl y both sides by $ \ mathbf { B } $ on the right : $ (\ mathbf { A }+\ mathbf { B }) \ mathbf { B } = \ mathbf { A }\ mathbf { B }\ mathbf { B } $
-
[49]
D i s t r i b u t e on the left : $ \ mathbf { A }\ mathbf { B } + \ mathbf { B }^2 = \ mathbf { A }\ mathbf { B }\ mathbf { B } $ . ... U n p r e s e n t e d length : 2880 tokens Step 230 •n q=15•K 1=366, K2=779• resp_len=480 (middle) Start with the given equ at io n : \[ \ mathbf { A } + \ mathbf { B } = \ mathbf { A }\ mathbf { B }. \] Rearranging , \[...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.