Recognition: no theorem link
PECMAN: Perception-enabled Collaborative Multi-Agent Navigation in Unknown Environments
Pith reviewed 2026-05-12 04:55 UTC · model grok-4.3
The pith
Multi-agent robots share new environmental discoveries to replan paths proactively, cutting team completion time by up to 52%.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
PECMAN is built upon distributed tree morphing and shared perception strategies, where each agent reacts to environmental changes and morphs its respective tree to replan its path, while simultaneously broadcasting newly discovered structures to other agents, thus enabling them to proactively replan even in areas that have not yet been explored by them, which reduces redundant reactions and unnecessary replannings of the agents due to improved situational awareness.
What carries the argument
Distributed tree morphing with shared perception broadcasts, in which agents prune invalid nodes and edges from their RRT*-style trees and repair disjoint subtrees at hot-nodes using teammate updates.
If this is right
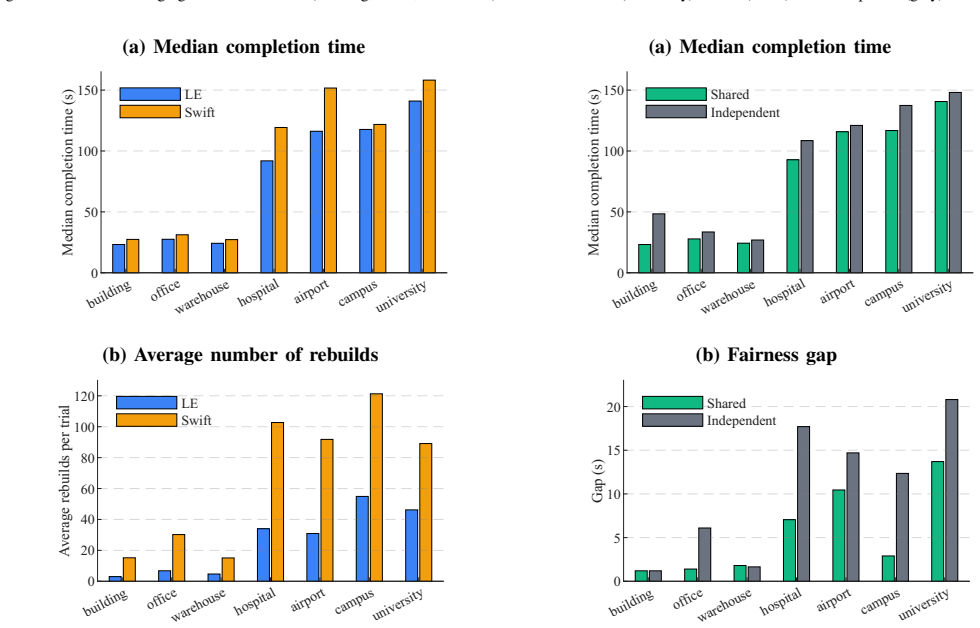
- Team completion time decreases by up to 52% relative to independent replanning.
- Success rates stay near 100% across varied 2D scenarios and real-robot tests.
- Agents avoid redundant replanning by using teammate discoveries in unexplored regions.
- The method supports real-time adaptability without full tree rebuilds from scratch.
Where Pith is reading between the lines
- The same sharing mechanism could scale to larger teams provided communication bandwidth stays sufficient.
- Adding moving obstacles would test whether the morphing speed still keeps pace with changing conditions.
- Fallback local-only planning would be needed if broadcasts fail entirely.
Load-bearing premise
Broadcasting newly discovered structures allows other agents to update their plans without communication delays, packet loss, or inconsistent world models that would invalidate the shared tree updates.
What would settle it
A simulation run in which introduced broadcast delays or losses cause agents to plan paths through newly discovered obstacles, producing collision rates or failure rates well above the reported near-100% success.
Figures



read the original abstract
Most path planners assume fully known, static environments, assumptions that fail when robots navigate in dynamic and partially observable environments. SMART-3D addresses these issues by real-time replanning, where it morphs the underlying RRT* tree whenever new obstacles or structures are discovered in the environment. Instead of rebuilding the tree entirely from scratch, SMART-3D prunes invalid nodes and edges and subsequently repairs the disjoint subtrees at hot-nodes to find a new path, thus providing high computational efficiency for real-time adaptability. We extend SMART-3D to perception-enabled collaborative multi-agent navigation (PECMAN) in unknown environments. PECMAN is built upon distributed tree morphing and shared perception strategies, where each agent reacts to environmental changes and morphs its respective tree to replan its path, while simultaneously broadcasting newly discovered structures to other agents, thus enabling them to proactively replan even in areas that have not yet been explored by them. This approach reduces redundant reactions and unnecessary replannings of the agents due to improved situational awareness. The performance of PECMAN was evaluated by 28,000 multi-agent simulations on seven 2D scenarios with different case studies. The results show that PECMAN achieves up to 52% reduction in the team-completion time, while maintaining near 100% success rates. Finally, PECMAN was tested by real experiments on two autonomous robots in a building environment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript extends the SMART-3D single-agent RRT* morphing planner to PECMAN, a multi-agent system for navigation in unknown environments. Agents perform distributed tree morphing upon local perception of changes and broadcast newly discovered structures so that teammates can proactively replan paths in unexplored regions. Evaluation consists of 28,000 multi-agent simulations across seven 2D scenarios plus real-robot experiments on two platforms; the central empirical claim is an up to 52% reduction in team completion time while preserving near-100% success rates.
Significance. If the performance gains survive realistic communication modeling and proper baseline controls, the work would supply a concrete, perception-sharing mechanism that reduces redundant replanning in multi-robot teams operating under partial observability. The scale of the simulation campaign (28k runs) and the inclusion of hardware validation are positive indicators of engineering effort.
major comments (2)
- [Abstract / Evaluation] Abstract and Evaluation section: the headline 52% team-completion-time reduction is reported without any description of the communication layer used in the 28,000 simulations. The method description states that agents 'broadcast newly discovered structures' to enable proactive replanning, yet no latency, packet-loss, bandwidth, or consistency model is supplied. Because the claimed advantage rests on timely shared tree updates, the absence of these parameters leaves open the possibility that the measured gains are an artifact of an idealized instantaneous broadcast.
- [Evaluation] Evaluation section: no baseline algorithms (e.g., independent RRT* per agent, centralized planning, or non-sharing variants of SMART-3D) are compared, and no statistical significance, variance, or confidence intervals are provided for the 52% figure or the success-rate claim. Without these controls the magnitude of improvement cannot be assessed.
minor comments (2)
- [Abstract] The abstract refers to 'seven 2D scenarios with different case studies' but does not enumerate the scenarios or the case-study parameters; a table or explicit list would improve reproducibility.
- [Method] Notation for the shared RRT* tree (e.g., how 'hot-nodes' and pruned subtrees are synchronized across agents) is introduced only informally; a short pseudocode block or diagram would clarify the distributed morphing protocol.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for clearer communication assumptions and stronger evaluation controls. We address each major comment below and will revise the manuscript to incorporate the suggested clarifications and additions.
read point-by-point responses
-
Referee: [Abstract / Evaluation] Abstract and Evaluation section: the headline 52% team-completion-time reduction is reported without any description of the communication layer used in the 28,000 simulations. The method description states that agents 'broadcast newly discovered structures' to enable proactive replanning, yet no latency, packet-loss, bandwidth, or consistency model is supplied. Because the claimed advantage rests on timely shared tree updates, the absence of these parameters leaves open the possibility that the measured gains are an artifact of an idealized instantaneous broadcast.
Authors: We agree that the communication assumptions require explicit description. The 28,000 simulations used an idealized model of instantaneous, reliable broadcast of newly discovered structures with no latency, packet loss, or bandwidth limits, chosen to focus on the benefits of distributed perception sharing and tree morphing. We will add a dedicated paragraph in the Evaluation section detailing this model and include a brief discussion of how moderate delays could still yield gains through proactive replanning while noting it as a limitation for future work with realistic communication models. revision: yes
-
Referee: [Evaluation] Evaluation section: no baseline algorithms (e.g., independent RRT* per agent, centralized planning, or non-sharing variants of SMART-3D) are compared, and no statistical significance, variance, or confidence intervals are provided for the 52% figure or the success-rate claim. Without these controls the magnitude of improvement cannot be assessed.
Authors: The reported 52% reduction is computed against a non-sharing baseline in which each agent independently applies SMART-3D morphing without broadcasting or incorporating teammate discoveries. We will explicitly define and tabulate this baseline (along with any feasible additional controls such as centralized planning) in the revised Evaluation section. We will also augment all performance figures with means, standard deviations, 95% confidence intervals, and statistical significance tests computed over the 28,000 runs to allow proper assessment of the improvement magnitude. revision: yes
Circularity Check
No circularity: performance claims rest on simulation results, not derivations
full rationale
The paper describes an algorithmic extension of prior SMART-3D tree-morphing to a multi-agent setting with shared perception, then reports outcomes from 28,000 simulations and real-robot tests. No equations, fitted parameters, uniqueness theorems, or analytic predictions appear in the provided text. The 52% completion-time reduction is presented as an empirical measurement rather than a quantity derived from the method itself, so no step reduces to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Newly discovered structures can be broadcast and incorporated into other agents' trees without introducing inconsistencies or delays.
Reference graph
Works this paper leans on
-
[1]
Exploration of underwater life with an acoustically controlled soft robotic fish,
R. K. Katzschmann, J. Del Preto, R. MacCurdy, and D. Rus, “Exploration of underwater life with an acoustically controlled soft robotic fish,”Science Robotics, vol. 3, no. 16, 2018. [Online]. Available: https://doi.org/10.1126/scirobotics.aar3449
-
[2]
Applications of marine robotic vehicles,
J. Yuh, G. Marani, and D. R. Blidberg, “Applications of marine robotic vehicles,”Intelligent Service Robotics, vol. 4, no. 4, pp. 221–231, 2011. [Online]. Available: https://doi.org/10.1007/s11370-011-0096-5
-
[3]
CT-CPP: Coverage path planning for 3D terrain reconstruction using dynamic coverage trees,
Z. Shen, J. Song, K. Mittal, and S. Gupta, “CT-CPP: Coverage path planning for 3D terrain reconstruction using dynamic coverage trees,” IEEE Robot. Autom. Lett., vol. 7, no. 1, pp. 135–142, 2022. [Online]. Available: https://doi.org/10.1109/LRA.2021.3119870
-
[4]
Autonomous mapping of underwater 3-D structures: From view planning to execution,
N. Palomeras, N. Hurt ´os, M. Carreras, and P. Ridao, “Autonomous mapping of underwater 3-D structures: From view planning to execution,”IEEE Robot. Autom. Lett., vol. 3, no. 3, pp. 1965–1971,
work page 1965
-
[5]
Available: https://ieeexplore.ieee.org/document/8299494
[Online]. Available: https://ieeexplore.ieee.org/document/8299494
-
[6]
C ∗: A coverage path planning algorithm for unknown environments using rapidly covering graphs,
Z. Shen, J. P. Wilson, and S. Gupta, “C ∗: A coverage path planning algorithm for unknown environments using rapidly covering graphs,” IEEE Transactions on Robotics, vol. 42, pp. 1233–1253, 2026. [Online]. Available: https://doi.org/10.1109/TRO.2026.3661719
-
[7]
ϵ ⋆: An online coverage path planning algorithm,
J. Song and S. Gupta, “ϵ ⋆: An online coverage path planning algorithm,”IEEE Trans. Robot., vol. 34, no. 2, pp. 526–533, 2018. [Online]. Available: https://doi.org/10.1109/TRO.2017.2780259
-
[8]
Human–robot planning and learning for marine data collection,
T. Somers and G. A. Hollinger, “Human–robot planning and learning for marine data collection,”Autonomous Robots, vol. 40, no. 7, p. 1123–1137, 2016. [Online]. Available: https://doi.org/10.1007/ s10514-015-9502-8
work page 2016
-
[9]
Uav-based smart agriculture: a review of uav sensing and applications,
S. Moradi, A. Bokani, and J. Hassan, “Uav-based smart agriculture: a review of uav sensing and applications,” in2022 32nd International Telecommunication Networks and Applications Conference (ITNAC), 2022, pp. 181–184. [Online]. Available: https://doi.org/10.1109/ITNAC55475.2022.9998411
-
[10]
G. G. R. d. Castro, G. S. Berger, A. Cantieri, M. Teixeira, J. Lima, A. I. Pereira, and M. F. Pinto, “Adaptive path planning for fusing rapidly exploring random trees and deep reinforcement learning in an agriculture dynamic environment uavs,”Agriculture, vol. 13, no. 2,
-
[11]
Available: https://www.mdpi.com/2077-0472/13/2/354 7
[Online]. Available: https://www.mdpi.com/2077-0472/13/2/354 7
work page 2077
-
[12]
Drone-based bridge inspections: Current practices and future directions,
T. Panigati, M. Zini, D. Striccoli, P. F. Giordano, D. Tonelli, M. P. Limongelli, and D. Zonta, “Drone-based bridge inspections: Current practices and future directions,”Automation in Construction, vol. 173, p. 106101, 2025. [Online]. Available: https://www.sciencedirect.com/ science/article/pii/S0926580525001414
work page 2025
-
[13]
Slam based adaptive navigation of auvs for oil spill cleaning,
J. Song, K. Qiu, S. Gupta, and J. Hare, “Slam based adaptive navigation of auvs for oil spill cleaning,” in2014 Oceans - St. John’s, 2014, pp. 1–6. [Online]. Available: https://doi.org/10.1109/OCEANS.2014.7003028
-
[14]
Efficient path planning of AUVs for container ship oil spill detection in coastal areas,
S. V . Kumar, R. Jayaparvathy, and B. Priyanka, “Efficient path planning of AUVs for container ship oil spill detection in coastal areas,”Ocean Engineering, vol. 217, 2020. [Online]. Available: https://doi.org/10.1016/j.oceaneng.2020.107932
-
[15]
Dare: Diver action recognition encoder for underwater human–robot interaction,
J. Yang, J. P. Wilson, and S. Gupta, “Dare: Diver action recognition encoder for underwater human–robot interaction,”IEEE Access, vol. 11, pp. 76 926–76 940, 2023. [Online]. Available: https://doi.org/10.1109/ ACCESS.2023.3298304
-
[16]
Line-of-sight target tracking control of underactuated autonomous underwater vehicles,
K. Shojaei and M. Dolatshahi, “Line-of-sight target tracking control of underactuated autonomous underwater vehicles,”Ocean Engineering, vol. 133, pp. 244–252, 2017. [Online]. Available: https://doi.org/10. 1016/j.oceaneng.2017.02.007
work page 2017
-
[17]
J. Z. Hare, S. Gupta, and T. A. Wettergren, “Pose: Prediction- based opportunistic sensing for energy efficiency in sensor networks using distributed supervisors,”IEEE Transactions on Cybernetics, vol. 48, no. 7, pp. 2114–2127, 2018. [Online]. Available: https: //doi.org/10.1109/TCYB.2017.2727981
-
[18]
POSE.R: Prediction-based opportunistic sensing for resilient and efficient sensor networks,
J. Z. Hare, J. Song, S. Gupta, and T. A. Wettergren, “POSE.R: Prediction-based opportunistic sensing for resilient and efficient sensor networks,”ACM Transactions on Sensor Networks, vol. 17, no. 1,
-
[19]
Available: https://doi.org/10.1145/3419755
[Online]. Available: https://doi.org/10.1145/3419755
-
[20]
E. U. Acar, H. Choset, Y . Zhang, and M. Schervish, “Path planning for robotic demining: Robust sensor-based coverage of unstructured environments and probabilistic methods,”The International Journal of Robotics Research, vol. 22, no. 7-8, pp. 441–466, 2003. [Online]. Available: https://doi.org/10.1177/02783649030227002
-
[21]
Symbolic analysis of sonar data for underwater target detection,
K. Mukherjee, S. Gupta, A. Ray, and S. Phoha, “Symbolic analysis of sonar data for underwater target detection,”IEEE J. Oceanic Eng., vol. 36, no. 2, pp. 219–230, 2011. [Online]. Available: https://doi.org/10.1109/JOE.2011.2122590
-
[22]
ϵ ⋆+: An online coverage path planning algorithm for energy-constrained autonomous vehicles,
Z. Shen, J. P. Wilson, and S. Gupta, “ϵ ⋆+: An online coverage path planning algorithm for energy-constrained autonomous vehicles,” in Global Oceans 2020: Singapore – U.S. Gulf Coast, 2020, pp. 1–
work page 2020
-
[23]
Available: https://doi.org/10.1109/IEEECONF38699.2020
[Online]. Available: https://doi.org/10.1109/IEEECONF38699.2020. 9389353
-
[24]
Autonomous uav exploration and mapping in uncharted terrain through boundary-driven strategy,
F. O. Coelho, M. F. Pinto, I. Z. Biundini, G. G. R. Castro, F. A. A. Andrade, and A. L. M. Marcato, “Autonomous uav exploration and mapping in uncharted terrain through boundary-driven strategy,” IEEE Access, vol. 12, pp. 92 464–92 483, 2024. [Online]. Available: https://doi.org/10.1109/ACCESS.2024.3422834
-
[25]
K. Mukherjee, S. Gupta, A. Ray, and T. A. Wettergren, “Statistical- mechanics-inspired optimization of sensor field configuration for detection of mobile targets,”IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), vol. 41, no. 3, pp. 783–791, 2011. [Online]. Available: https://doi.org/10.1109/TSMCB.2010.2092763
-
[26]
J. P. Wilson, S. Gupta, and T. A. Wettergren, “Generalized multispeed dubins motion model,”IEEE Transactions on Robotics, vol. 41, pp. 2861–2878, 2025. [Online]. Available: https://doi.org/10.1109/TRO. 2025.3554436
work page doi:10.1109/tro 2025
-
[27]
SMART: Self-morphing adaptive replanning tree,
Z. Shen, J. P. Wilson, S. Gupta, and R. Harvey, “SMART: Self-morphing adaptive replanning tree,”IEEE Robot. Autom. Lett., vol. 8, no. 11, pp. 7312–7319, 2023. [Online]. Available: https: //doi.org/10.1109/LRA.2023.3315210
-
[28]
SMART-3D: Three-dimensional self-morphing adaptive replanning tree,
P. Agrawal, S. Gupta, and Z. Shen, “SMART-3D: Three-dimensional self-morphing adaptive replanning tree,” 2025. [Online]. Available: https://arxiv.org/abs/2509.16812
-
[29]
J. Song and S. Gupta, “CARE: Cooperative autonomy for resilience and efficiency of robot teams for complete coverage of unknown environments under robot failures,”Auton. Robots, vol. 44, pp. 647– 671, 2020
work page 2020
-
[30]
Pattern Recog- nition153, 110500 (2024).https://doi.org/https://doi.org/10.1016/j
G. Sharon, R. Stern, A. Felner, and N. R. Sturtevant, “Conflict-based search for optimal multi-agent pathfinding,”Artificial Intelligence, vol. 219, pp. 40–66, 2015. [Online]. Available: https://doi.org/10.1016/j. artint.2014.11.006
work page doi:10.1016/j 2015
-
[31]
K. Okumura, M. Machida, X. D ´efago, and Y . Tamura, “Priority inheritance with backtracking for iterative multi-agent path finding,” Artificial Intelligence, vol. 310, p. 103752, 2022. [Online]. Available: https://doi.org/10.1016/j.artint.2022.103752
-
[32]
LaCAM: Search-based algorithm for quick multi-agent pathfinding,
K. Okumura, “LaCAM: Search-based algorithm for quick multi-agent pathfinding,” inProc. AAAI Conference on Artificial Intelligence, vol. 37, no. 10, 2023, pp. 11 655–11 662. [Online]. Available: https://arxiv.org/abs/2211.13432
-
[33]
Persistent and robust execution of MAPF schedules in warehouses,
W. H ¨onig, S. Kiesel, A. Tinka, J. W. Durham, and N. Ayanian, “Persistent and robust execution of MAPF schedules in warehouses,” IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1125–1131,
-
[34]
Available: https://doi.org/10.1109/LRA.2019.2894217
[Online]. Available: https://doi.org/10.1109/LRA.2019.2894217
-
[35]
Symmetry-breaking constraints for grid-based multi-agent path finding,
J. Li, D. Harabor, P. J. Stuckey, H. Ma, and S. Koenig, “Symmetry-breaking constraints for grid-based multi-agent path finding,” inProc. AAAI Conference on Artificial Intelligence, vol. 33, no. 01, 2019, pp. 6087–6095. [Online]. Available: https: //ojs.aaai.org/index.php/AAAI/article/view/4565
work page 2019
-
[36]
Lifelong multi-agent path finding in large-scale warehouses,
J. Li, A. Tinka, S. Kiesel, J. W. Durham, T. K. S. Kumar, and S. Koenig, “Lifelong multi-agent path finding in large-scale warehouses,” inProc. AAAI Conference on Artificial Intelligence, vol. 35, no. 13, 2021, pp. 11 272–11 281. [Online]. Available: https://ojs.aaai.org/index.php/AAAI/article/view/17344
work page 2021
-
[37]
Multi-agent RRT*: Sampling-based cooperative pathfinding (extended abstract),
M. ˇC´ap, P. Nov ´ak, J. V ok ˇr´ınek, and M. P ˇechouˇcek, “Multi-agent RRT*: Sampling-based cooperative pathfinding (extended abstract),” inProc. International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2013, pp. 1263–1264. [Online]. Available: https://dl.acm.org/doi/10.5555/2484920.2485174
-
[38]
K. Solovey, O. Salzman, and D. Halperin, “Finding a needle in an exponential haystack: Discrete RRT for exploration of implicit roadmaps in multi-robot motion planning,”International Journal of Robotics Research, vol. 35, no. 5, pp. 501–513, 2016. [Online]. Available: https://doi.org/10.1177/0278364915615688
-
[39]
D. Ferguson, N. Kalra, and A. Stentz, “Replanning with RRTs,” in IEEE Int. Conf. Robot. Automat., 2006, pp. 1243–1248. [Online]. Available: https://doi.org/10.1109/ROBOT.2006.1641879
-
[40]
RRT X: Asymptotically optimal single-query sampling-based motion planning with quick replanning,
M. Otte and E. Frazzoli, “RRT X: Asymptotically optimal single-query sampling-based motion planning with quick replanning,”Int. J. Robot. Res., vol. 35, no. 7, pp. 797–822, 2016. [Online]. Available: https://doi.org/10.1177/0278364915594679
-
[41]
Real-time randomized path planning for robot navigation,
J. Bruce and M. Veloso, “Real-time randomized path planning for robot navigation,” inIEEE Int. Conf. Intell. Robots Syst., vol. 3, 2002, pp. 2383–2388. [Online]. Available: https://doi.org/10.1109/IRDS.2002. 1041624
-
[42]
Reciprocaln- body collision avoidance,
J. van den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocaln- body collision avoidance,” inRobotics Research. Springer, 2011, pp. 3–19
work page 2011
-
[43]
The dynamic window approach to collision avoidance,
D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,”IEEE Robotics and Automation Magazine, vol. 4, no. 1, pp. 23–33, 1997. [Online]. Available: https://doi.org/10.1109/100.580977
-
[44]
T ⋆: Time-optimal risk-aware motion planning for curvature-constrained vehicles,
J. Song, S. Gupta, and T. A. Wettergren, “T ⋆: Time-optimal risk-aware motion planning for curvature-constrained vehicles,”IEEE Robotics and Automation Letters, vol. 4, no. 1, pp. 33–40, 2019
work page 2019
-
[45]
Rapid path planning for Dubins vehicles under environmental currents,
K. Mittal, J. Song, S. Gupta, and T. A. Wettergren, “Rapid path planning for Dubins vehicles under environmental currents,” Robot. Auton. Syst., vol. 134, p. 103646, 2020. [Online]. Available: https://doi.org/https://doi.org/10.1016/j.robot.2020.103646
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.