Recognition: no theorem link
Diagnostic Certificates of Data Quality and Regression Identifiability for Koopman Identification
Pith reviewed 2026-05-12 04:12 UTC · model grok-4.3
The pith
Certificates isolate state coverage, lifted feature degeneracy, and regression conditioning failures in Koopman data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
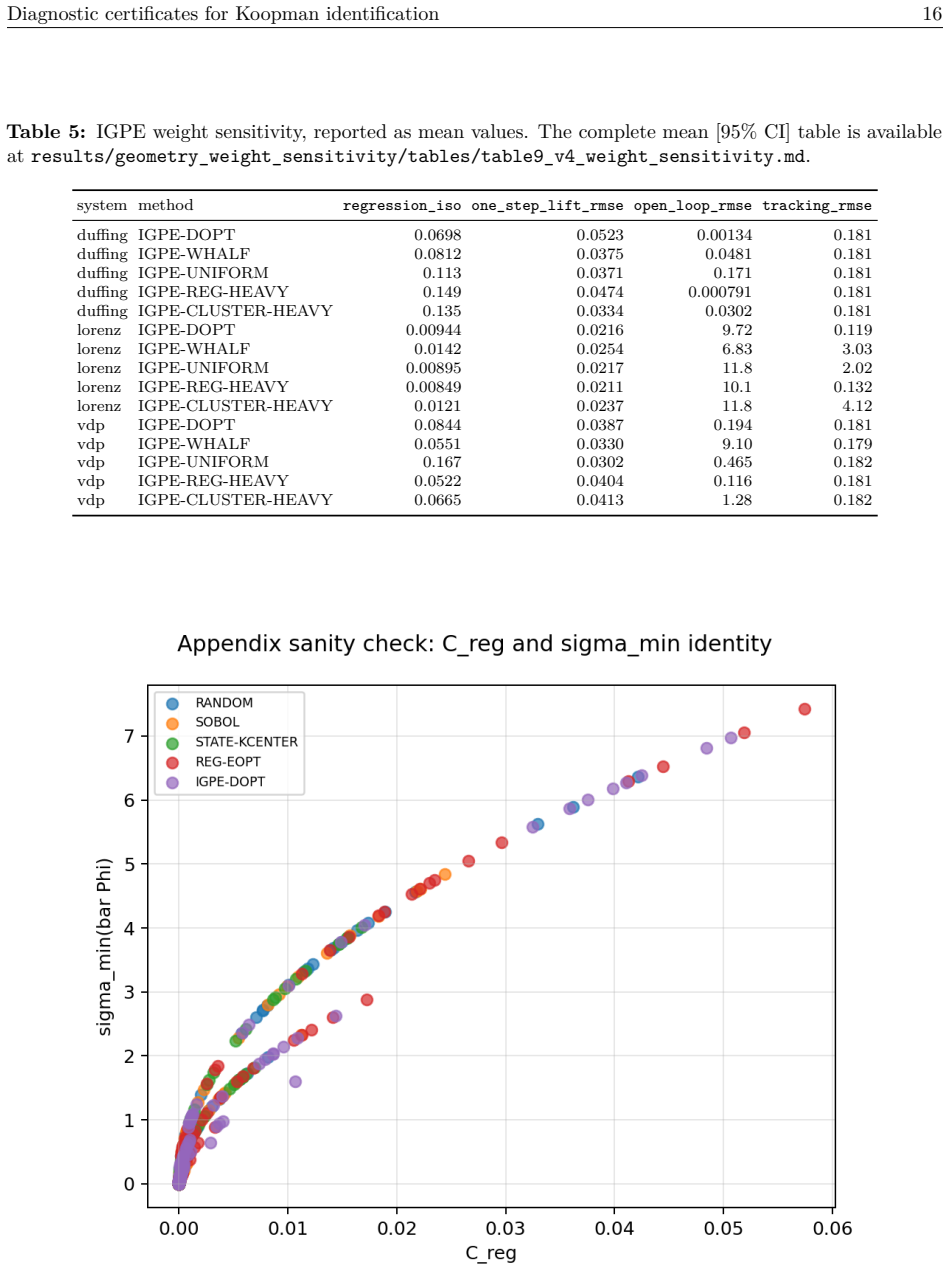
The paper establishes that data quality for EDMD with control is governed by the joint distribution of lifted state features and inputs, not by input richness alone. It introduces certificates that separately diagnose state-space coverage, lifted-feature nondegeneracy, and regression-spectrum conditioning. The regression-spectrum certificate directly bounds the smallest singular value of the standardized design matrix, carries Fisher-information and one-step EDMDc stability meanings, and admits a finite-sample lower bound under a population spectral gap. Structural examples and a Schur-complement condition show that the four diagnostic layers cannot be substituted for one another.
What carries the argument
The regression-spectrum certificate, defined as the smallest singular value of the active standardized design matrix formed by lifted features and controls, which supplies the finite-sample lower bound under a population spectral gap.
If this is right
- State, lifted-feature, input, and regression diagnostics cannot replace one another, as shown by structural counter-examples and the Schur-complement relation.
- IGPE-DOPT scores candidate trajectory segments using the certificates to improve data collection.
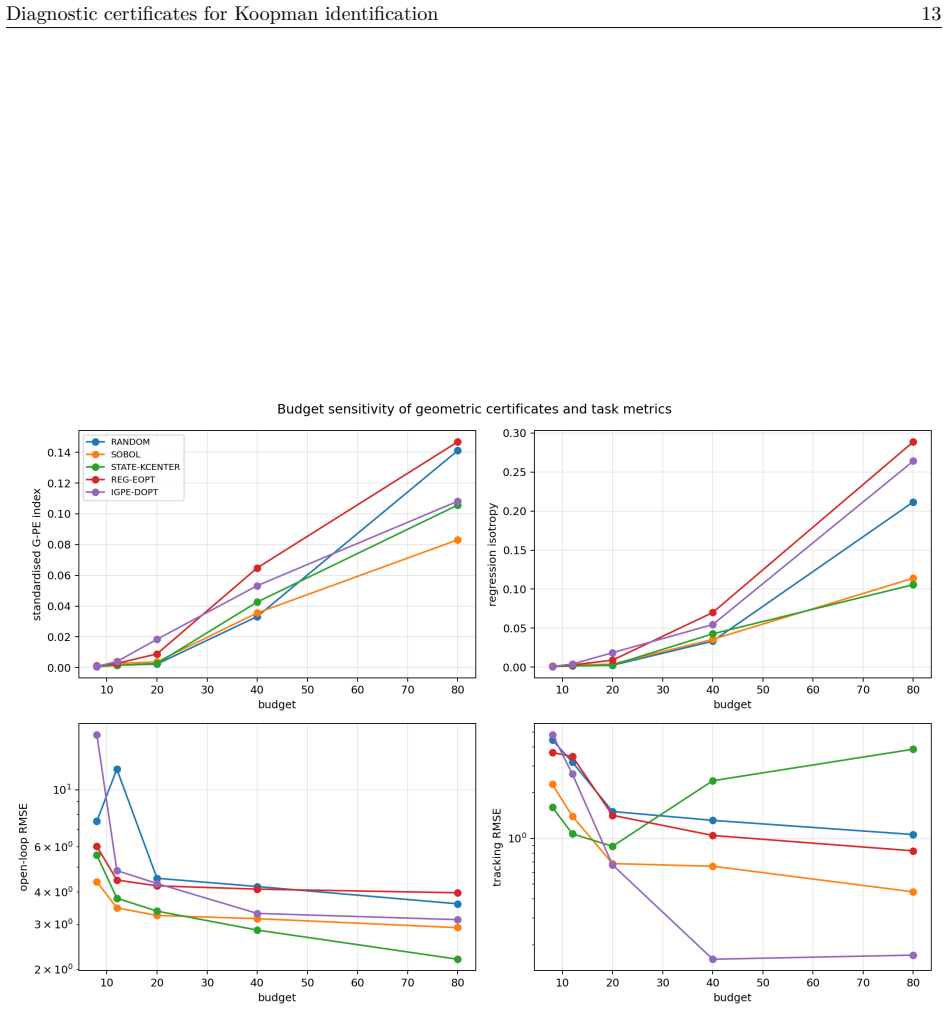
- Budget allocation and weighting in sampling shift which certificate layer becomes the active bottleneck.
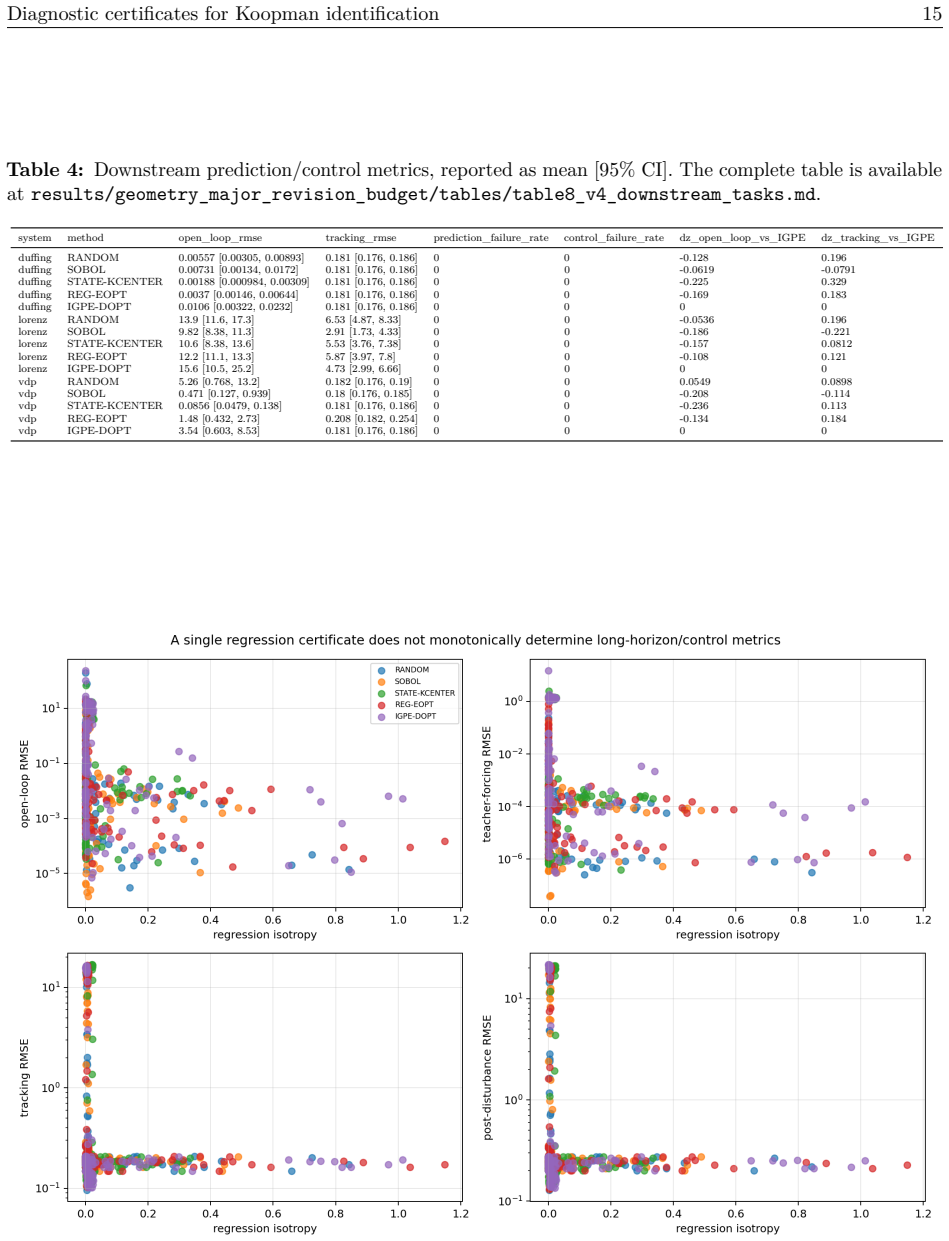
- Downstream prediction or control accuracy is not guaranteed to improve when only one certificate is optimized.
Where Pith is reading between the lines
- The certificates could be monitored online to trigger adaptive sampling or input redesign during real-time identification.
- Similar layered checks might diagnose identifiability problems in other embedding-based or lifted linear models beyond Koopman.
- If the spectral-gap assumption can be verified from data, the bound supplies a practical stopping criterion for trajectory collection.
Load-bearing premise
The finite-sample lower bound on the regression spectrum holds only when the underlying population of lifted features and inputs has a spectral gap.
What would settle it
Measure the actual smallest singular value of the regression design matrix on trajectories from the Duffing oscillator and check whether it falls below the certificate's finite-sample lower bound whenever the population spectral gap is removed or made small.
Figures


read the original abstract
Classical persistent excitation criteria usually assess whether an input or regressor signal is sufficiently rich. In Koopman and EDMD with control (EDMDc), however, data quality is determined by the concatenation of lifted state features and control inputs. Input-rich data can still visit a narrow state region, well-spread state samples can still produce degenerate lifted features, and both can fail to condition the final regression problem. This paper develops a diagnostic certificate framework for locating these failures. The certificates separate state-space coverage and clustering, lifted-feature nondegeneracy, and the final regression spectrum. The regression-spectrum certificate is the layer with direct theoretical guarantees: it controls the active standardized design's smallest singular value, has Fisher-information and one-step EDMDc stability interpretations, and admits a finite-sample lower bound under a population spectral gap. We also give structural examples and a Schur-complement condition showing why state, lifted, input, and regression diagnostics cannot be substituted for one another. As a sampling example, IGPE-DOPT uses these certificates to score candidate trajectory segments. Experiments on Duffing, Van der Pol, and Lorenz systems compare input-, state-, lifted-, and regression-oriented baselines. The results show that certificate layers separate, budget and weights shift bottlenecks, and downstream prediction or control performance is not monotone in any single certificate. The framework is therefore intended as an interpretable diagnostic and data-collection guide, not as a universal optimality claim.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a layered diagnostic certificate framework for data quality assessment in Koopman identification with control inputs (EDMDc). The certificates address state-space coverage and clustering, lifted-feature nondegeneracy, and the regression spectrum of the active standardized design matrix. The regression-spectrum certificate is equipped with interpretations in terms of Fisher information and one-step EDMDc stability, along with a finite-sample lower bound conditioned on a population spectral gap. Structural examples using Schur complements demonstrate that the four certificate layers are non-substitutable. Experiments on the Duffing, Van der Pol, and Lorenz oscillators compare various baselines and show that certificate values are not monotone with downstream performance, motivating the use of IGPE-DOPT for trajectory segment scoring.
Significance. Should the finite-sample bound and non-substitutability results hold under the stated assumptions, the work provides a principled, interpretable toolkit for diagnosing data deficiencies in data-driven Koopman modeling. This is significant for practical applications in system identification where poor data conditioning can lead to unreliable models. The explicit demonstration that state, lifted, input, and regression diagnostics cannot substitute for each other is a notable contribution, as is the experimental evidence that no single layer suffices for optimal data selection. The framework's strength in offering both theoretical guarantees and practical sampling guidance enhances its potential impact in the field of nonlinear system identification.
major comments (1)
- The finite-sample lower bound on the smallest singular value of the active standardized design (regression-spectrum certificate) is derived under the assumption of a positive population spectral gap in the lifted feature space. However, the manuscript does not verify the existence or magnitude of this gap for the Duffing, Van der Pol, or Lorenz systems after lifting, nor does it provide sensitivity analysis showing how the bound performs when the gap is small or absent. This assumption is load-bearing for the theoretical guarantee and requires explicit checking or relaxation to support the claims.
minor comments (3)
- The notation and definitions for the four certificate layers would benefit from a consolidated summary table to improve readability.
- Details on data exclusion criteria, number of trials, and error bar computation are missing from the experimental section, which would strengthen the reproducibility of the reported comparisons.
- Some figure captions could more explicitly link the visualized certificate values to the theoretical interpretations in the regression-spectrum layer.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review, as well as the positive assessment of the manuscript's significance. We address the single major comment below and will revise the manuscript to incorporate the requested verification and analysis.
read point-by-point responses
-
Referee: The finite-sample lower bound on the smallest singular value of the active standardized design (regression-spectrum certificate) is derived under the assumption of a positive population spectral gap in the lifted feature space. However, the manuscript does not verify the existence or magnitude of this gap for the Duffing, Van der Pol, or Lorenz systems after lifting, nor does it provide sensitivity analysis showing how the bound performs when the gap is small or absent. This assumption is load-bearing for the theoretical guarantee and requires explicit checking or relaxation to support the claims.
Authors: We agree that the finite-sample lower bound is conditional on a positive population spectral gap and that the current manuscript lacks explicit verification of this gap (or sensitivity to its magnitude) for the Duffing, Van der Pol, and Lorenz examples. In the revised version we will add numerical estimates of the gap in the lifted feature spaces for these three systems, obtained from long trajectories or known dynamics where feasible. We will also include a sensitivity analysis that illustrates bound degradation as the gap approaches zero. This directly addresses the load-bearing assumption while leaving the conditional statement of the theorem unchanged. The experimental results on certificate utility and non-substitutability remain independent of the bound and continue to support the practical contribution. revision: yes
Circularity Check
No circularity: finite-sample bound conditioned on external population gap; layers separated by independent arguments
full rationale
The regression-spectrum certificate's finite-sample lower bound is explicitly conditioned on a population spectral gap (positive gap in the population Gram matrix of lifted features), which is an external modeling assumption rather than a quantity fitted or defined from the same regression data. Structural examples and the Schur-complement condition establish non-substitutability of the four certificate layers without reducing any layer to another by construction. No self-definitional steps, fitted-input-called-prediction patterns, or load-bearing self-citations appear in the derivation chain. The framework remains self-contained against external benchmarks such as the stated interpretations (Fisher information, EDMDc stability).
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A population spectral gap exists that enables the finite-sample lower bound on the regression-spectrum certificate.
Reference graph
Works this paper leans on
-
[1]
Generalized multispeed dubins motion model,
doi: 10.1109/TRO. 2019.2923880. Nikil Boddupalli, Aqib Hasnain, Sai Pushpak Nandanoori, and Enoch Yeung. Koopman operators for generalized persistence of excitation conditions for nonlinear systems. InProceedings of the IEEE 58th Conference on Decision and Control (CDC), pages 8106–8111. IEEE,
work page doi:10.1109/tro 2019
-
[2]
doi: 10.1109/CDC40024.2019.9029365. Steven L Brunton, Marko Budišić, Eurika Kaiser, and J Nathan Kutz. Modern koopman theory for dynamical systems.SIAM Review, 64(2):229–340,
-
[3]
Salim Dahdah and James Richard Forbes
doi: 10.1137/21M1401243. Salim Dahdah and James Richard Forbes. System norm regularization methods for koopman operator approximation.Proceedings of the Royal Society A, 478(2264):20220162,
-
[4]
doi: 10.1098/rspa.2022.0162. Diagnostic certificates for Koopman identification 20 Arne De Cock, Michel Gevers, and Johan Schoukens. D-optimal input design for nonlinear fir-type systems: A dispersion-based approach.Automatica, 73:88–100,
-
[5]
doi: 10.1016/j.automatica. 2016.04.052. Mario Deflorian and Sebastian Zaglauer. Design of experiments for nonlinear dynamic system identification. InIFAC Proceedings Volumes, volume 44, pages 13179–13184. Elsevier,
-
[6]
doi: 10.3182/20110828-6-IT-1002.01502. Håkan Hjalmarsson. From experiment design to closed-loop control.Automatica, 41(3):393–438,
-
[7]
Mátyás Kiss, Roland Tóth, and Maarten Schoukens
doi: 10.1016/j.automatica.2004.11.021. Mátyás Kiss, Roland Tóth, and Maarten Schoukens. Space-filling input design for nonlinear state- space identification.IFAC-PapersOnLine, 58(15):562–567,
-
[8]
doi: 10.1016/j.ifacol.2024.08.589. Milan Korda and Igor Mezić. Linear predictors for nonlinear dynamical systems: Koopman operator meets model predictive control.Automatica, 93:149–160,
-
[9]
doi: 10.1016/j.automatica.2018.03
-
[10]
Lauren M Miller, Yonatan Silverman, Malcolm A MacIver, and Todd D Murphey
doi: 10.1109/LCSYS.2025.3582509. Lauren M Miller, Yonatan Silverman, Malcolm A MacIver, and Todd D Murphey. Ergodic exploration of distributed information.IEEE Transactions on Robotics, 32(1):36–52,
-
[11]
Kumpati S Narendra and Anuradha M Annaswamy
doi: 10.1109/TRO.2015.2500441. Kumpati S Narendra and Anuradha M Annaswamy. Persistent excitation in adaptive systems. International Journal of Control, 45(1):127–160,
-
[12]
Anup Parikh, Rushikesh Kamalapurkar, and Warren E Dixon
doi: 10.1080/00207178708933715. Anup Parikh, Rushikesh Kamalapurkar, and Warren E Dixon. Integral concurrent learning: Adaptive control with parameter convergence using finite excitation.International Journal of Adaptive Control and Signal Processing, 33(12):1775–1787,
-
[13]
Friedrich M Philipp, Manuel Schaller, Karl Worthmann, Sebastian Peitz, and Feliks Nüske
doi: 10.1002/acs.2945. Friedrich M Philipp, Manuel Schaller, Karl Worthmann, Sebastian Peitz, and Feliks Nüske. Error analysis of kernel edmd for prediction and control in the koopman framework.Journal of Nonlinear Science, 35:92,
-
[14]
Joshua L Proctor, Steven L Brunton, and J Nathan Kutz
doi: 10.1007/s00332-025-10182-3. Joshua L Proctor, Steven L Brunton, and J Nathan Kutz. Dynamic mode decomposition with control. SIAM Journal on Applied Dynamical Systems, 15(1):142–161,
-
[15]
doi: 10.1137/15M1013857. Remo Rickenbach, Johannes Köhler, Anna Scampicchio, Melanie N Zeilinger, and Andrea Carron. Active learning-based model predictive coverage control.IEEE Transactions on Automatic Control, 69(9):5931–5946,
-
[16]
Xiaoxue Shang, Jorge Cortés, and Yang Zheng
doi: 10.1109/TAC.2024.3365569. Xiaoxue Shang, Jorge Cortés, and Yang Zheng. Willems’ fundamental lemma for nonlinear systems with koopman linear embedding.IEEE Control Systems Letters,
-
[17]
doi: 10.1109/LCSYS.2024. 3522594. Diagnostic certificates for Koopman identification 21 V Smits and Oliver Nelles. Space-filling optimized excitation signals for nonlinear system identifica- tion of dynamic processes of a diesel engine.Control Engineering Practice, 144:105821,
-
[18]
Henk J van Waarde, Jaap Eising, Harry L Trentelman, and M Kanat Camlibel
doi: 10.1016/j.conengprac.2023.105821. Henk J van Waarde, Jaap Eising, Harry L Trentelman, and M Kanat Camlibel. Data informativity: A new perspective on data-driven analysis and control.IEEE Transactions on Automatic Control, 65(11):4753–4768,
-
[19]
Jan C Willems, Paolo Rapisarda, Ivan Markovsky, and Bart LM De Moor
doi: 10.1109/TAC.2020.2966717. Jan C Willems, Paolo Rapisarda, Ivan Markovsky, and Bart LM De Moor. A note on persistency of excitation.Systems & Control Letters, 54(4):325–329,
-
[20]
Matthew O Williams, Ioannis G Kevrekidis, and Clarence W Rowley
doi: 10.1016/j.sysconle.2004.09.003. Matthew O Williams, Ioannis G Kevrekidis, and Clarence W Rowley. A data-driven approximation of the koopman operator: Extending dynamic mode decomposition.Journal of Nonlinear Science, 25:1307–1346,
-
[21]
Alexander D Wilson, Joshua A Schultz, and Todd D Murphey
doi: 10.1007/s00332-015-9258-5. Alexander D Wilson, Joshua A Schultz, and Todd D Murphey. Trajectory synthesis for fisher information maximization.IEEE Transactions on Robotics, 30(6):1358–1370,
- [22]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.