Recognition: 2 theorem links
· Lean TheoremPolarNet: Single-Minima Neural Network for Modeling Lyapunov Functions
Pith reviewed 2026-05-12 03:51 UTC · model grok-4.3
The pith
PolarNet is a neural network architecture that structurally guarantees a single critical point for modeling Lyapunov functions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that PolarNet, through its specific architectural constraints, ensures the modeled function has precisely one critical point, while also satisfying the mathematical conditions of properness and universality required for Lyapunov functions, thereby enabling reliable use in neural Lyapunov control without the training instabilities caused by multiple minima in conventional networks.
What carries the argument
PolarNet, a neural network architecture engineered to possess exactly one critical point.
If this is right
- Existing neural Lyapunov control methods can use PolarNet as a direct replacement to sidestep training failures linked to multiple critical points.
- The resulting Lyapunov functions maintain a single minimum, which supports consistent stability certification.
- Theoretical guarantees on properness and universality hold for the functions produced by the architecture.
- Numerical tests confirm avoidance of the identified training difficulties across several control problems.
Where Pith is reading between the lines
- The single-critical-point design could be adapted to other function approximation tasks that require unique minima, such as certain optimization or energy landscapes.
- Testing PolarNet on higher-dimensional or partially observed systems would reveal whether the guarantees scale beyond the reported cases.
- Similar architectural constraints might be developed for other certificates like barrier functions in safety-critical control.
Load-bearing premise
That building a network to have only one critical point is sufficient to produce a valid Lyapunov function that works for proving stability across arbitrary system dynamics.
What would settle it
A numerical experiment in which a trained PolarNet produces a function with more than one critical point, or where the function fails to satisfy the Lyapunov decrease condition along system trajectories despite the single-point architecture.
Figures




read the original abstract
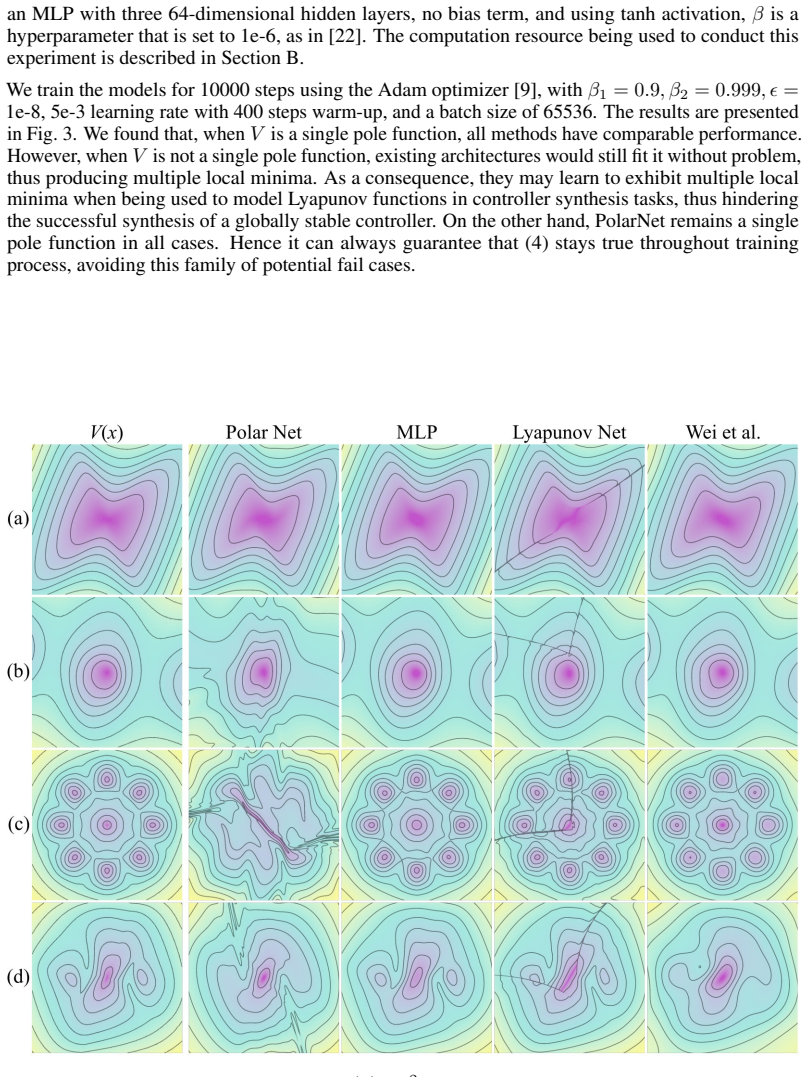
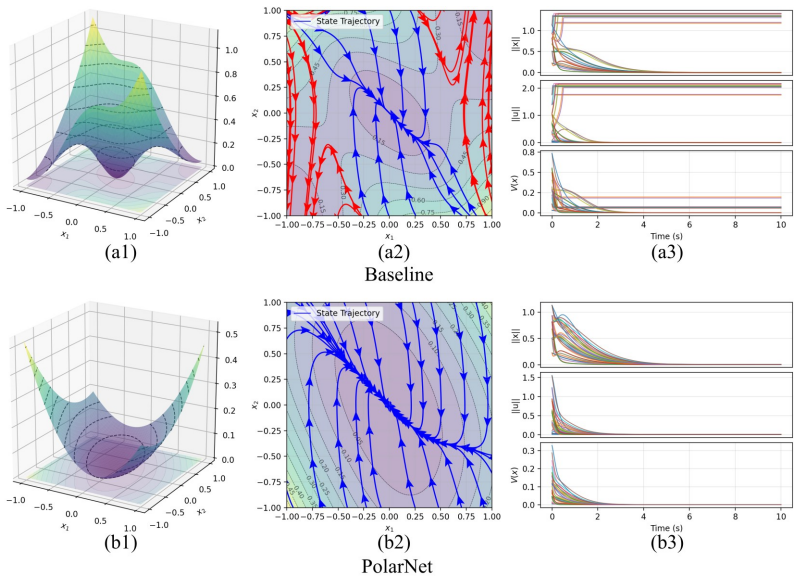
Learning control strategies with provable stability guarantees continues to be a challenging problem. In this work, we examine a family of training-time behaviors exhibited by existing neural Lyapunov control methods under specific conditions, which can hinder the synthesis of a provably stable controller. We identify the root cause as the lack of neural network architectural guarantees on the learned Lyapunov function, and propose PolarNet, a network architecture that provably addresses these issues by structurally guarantee to have a single critical point. We provide theoretical guarantee regarding the properness and universality of PolarNet for modeling Lyapunov functions, and show that using it as a drop-in replacement in existing neural Lyapunov control methods can effectively circumvent particular difficulties in training. We conduct a set of numerical experiments to verify that PolarNet consistently maintains a single critical point and, when used as a drop-in replacement in existing neural Lyapunov control methods, successfully avoids training failures caused by the lack of architectural guarantees. The code of this paper is available at https://github.com/23-zy/PolarNet.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes PolarNet, a neural network architecture for modeling Lyapunov functions that structurally enforces a single critical point at the origin. It claims theoretical guarantees of properness and universality within the class of functions suitable for Lyapunov analysis, and demonstrates via numerical experiments that the architecture serves as a drop-in replacement in existing neural Lyapunov control methods to avoid specific training pathologies such as multiple minima.
Significance. If the architectural guarantees and proofs hold, PolarNet could meaningfully improve reliability in neural Lyapunov control by eliminating a common source of training instability without requiring changes to the loss or optimization procedure. The open-source code release supports reproducibility and allows direct testing of the single-critical-point property.
major comments (2)
- [§3] §3 (Theoretical guarantees): The universality claim for PolarNet requires explicit statement of the function class and any restrictions on the system dynamics; the abstract states that single-minimum plus properness suffices for a valid Lyapunov function, but it is unclear whether this holds without additional assumptions on radial unboundedness or the form of the vector field.
- [Experimental results] Experimental results (numerical verification section): The experiments confirm single-critical-point behavior for PolarNet but do not report quantitative comparisons (e.g., success rate or failure frequency) against baseline neural Lyapunov methods across the tested systems; without these metrics the claim that PolarNet 'successfully avoids training failures' remains qualitative.
minor comments (2)
- [Abstract] Abstract: 'structurally guarantee' should read 'structurally guarantees'.
- [§2] Notation: The definition of the PolarNet layers and the precise location of the enforced critical point should be stated with an equation number in the main text for easy reference.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below with clarifications and indicate the revisions we will incorporate to improve the manuscript.
read point-by-point responses
-
Referee: [§3] §3 (Theoretical guarantees): The universality claim for PolarNet requires explicit statement of the function class and any restrictions on the system dynamics; the abstract states that single-minimum plus properness suffices for a valid Lyapunov function, but it is unclear whether this holds without additional assumptions on radial unboundedness or the form of the vector field.
Authors: We agree that greater precision is needed. In the revised manuscript, we will explicitly state the function class: the set of C^1 functions f: R^n -> R that are positive definite, proper (i.e., radially unbounded, lim_{||x||->infty} f(x) = infty), and possess a unique critical point at the origin. Properness is the standard mathematical term for radial unboundedness and is already proven for PolarNet; we will add a sentence clarifying this equivalence. Our universality result shows that PolarNet can approximate any function in this class to arbitrary accuracy (in the C^1 topology on compact sets), independent of any particular vector field. When PolarNet is used as a Lyapunov function for a given system, the negative-definiteness of the Lie derivative is enforced separately via the training loss or verification step, as is standard in neural Lyapunov control. We will revise Section 3 and the abstract accordingly to remove any ambiguity. revision: yes
-
Referee: [Experimental results] Experimental results (numerical verification section): The experiments confirm single-critical-point behavior for PolarNet but do not report quantitative comparisons (e.g., success rate or failure frequency) against baseline neural Lyapunov methods across the tested systems; without these metrics the claim that PolarNet 'successfully avoids training failures' remains qualitative.
Authors: We acknowledge that the current experiments are primarily qualitative demonstrations of the single-critical-point property and avoidance of specific pathologies. To strengthen the empirical claims, we will add quantitative metrics in the revised numerical verification section: specifically, success rates (fraction of independent training runs that converge to a valid Lyapunov function satisfying the stability certificate) and failure frequencies, computed over 20 random seeds for both PolarNet and the baseline architectures on each of the tested systems. These results will be presented in a new table or bar chart to support the statement that PolarNet avoids training failures more reliably. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper defines PolarNet as an explicit architectural construction whose single-critical-point property at the origin follows directly from the polar-coordinate parameterization and radial basis structure; this is not a fitted or data-dependent claim but a structural invariant proven by direct differentiation of the network output. The subsequent proofs of properness (radial unboundedness) and universality (density in the class of positive-definite functions) are standard analytic arguments that invoke only the architectural form and classical Lyapunov conditions, without any reduction to self-citations, ansatzes imported from prior author work, or renaming of empirical patterns. No equation equates a learned quantity to a prediction of itself, and the central guarantee is independent of any training data or fitted parameters. The derivation chain is therefore self-contained.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Standard results on neural network approximation power and Lyapunov function existence for stable systems.
invented entities (1)
-
PolarNet architecture
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel echoesPolarNet models a single pole function … exactly one critical point at x=0: ∇V≠0 ∀x≠0 … V=||Ψ(x)||² where Ψ is C^∞ smooth, invertible and zero-crossing … Theorem 2: If Ψ … then ||Ψ(x)||² is a single pole function.
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclearProof of Theorem 1 … Morse lemma … gradient flow … diffeomorphism between sublevel sets and spheres … Alexander duality not used.
Reference graph
Works this paper leans on
-
[1]
A. Alfarano, F. Charton, and A. Hayat. Global lyapunov functions: a long-standing open problem in mathematics, with symbolic transformers. InAdvances in Neural Information Processing Systems, volume 37, pages 93643–93670. Curran Associates, Inc., 2024
work page 2024
-
[2]
C. Barrett and C. Tinelli. Satisfiability modulo theories. InHandbook of model checking, pages 305–343. Springer, 2018
work page 2018
-
[3]
N. Boffi, S. Tu, N. Matni, J.-J. Slotine, and V . Sindhwani. Learning stability certificates from data. In J. Kober, F. Ramos, and C. Tomlin, editors,Proceedings of the 2020 Conference on Robot Learning, volume 155 ofProceedings of Machine Learning Research, pages 1341–1350. PMLR, 16–18 Nov 2021
work page 2020
- [4]
-
[5]
L. Dinh, J. Sohl-Dickstein, and S. Bengio. Density estimation using real nvp. InInternational Conference on Learning Representations, 2017
work page 2017
-
[6]
N. Gaby, F. Zhang, and X. Ye. Lyapunov-net: A deep neural network architecture for lyapunov function approximation. In2022 IEEE 61st Conference on Decision and Control (CDC), pages 2091–2096, 2022
work page 2091
-
[7]
V . Guillemin and A. Pollack.Differential Topology. American Mathematical Society, Aug. 2010
work page 2010
-
[8]
H. K. Khalil.Nonlinear systems. Prentice hall Upper Saddle River, NJ, 2002
work page 2002
-
[9]
D. P. Kingma and J. Ba. Adam: A method for stochastic optimization. In Y . Bengio and Y . LeCun, editors,3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, May 7-9, 2015, Conference Track Proceedings, 2015
work page 2015
-
[10]
D. P. Kingma and P. Dhariwal. Glow: Generative flow with invertible 1x1 convolutions. In Advances in Neural Information Processing Systems, volume 31. Curran Associates, Inc., 2018
work page 2018
-
[11]
D. P. Kingma, T. Salimans, R. Jozefowicz, X. Chen, I. Sutskever, and M. Welling. Improved variational inference with inverse autoregressive flow. InAdvances in Neural Information Processing Systems, volume 29. Curran Associates, Inc., 2016
work page 2016
-
[12]
J. M. Lee.Introduction to Smooth Manifolds. Springer New York, 2012
work page 2012
-
[13]
F. L. Lewis, D. L. Vrabie, and V . L. Syrmos.Optimal Control. Wiley, Jan. 2012
work page 2012
-
[14]
A. Mehrjou, M. Ghavamzadeh, and B. Schölkopf. Neural lyapunov redesign.arXiv preprint arXiv:2006.03947, 2020. 10
-
[15]
J. Milnor.Morse Theory. (AM-51). Princeton University Press, Dec. 1963
work page 1963
-
[16]
Nirenberg.Topics in Nonlinear Functional Analysis
L. Nirenberg.Topics in Nonlinear Functional Analysis. American Mathematical Society, Apr. 2001
work page 2001
-
[17]
A. Papachristodoulou and S. Prajna. On the construction of lyapunov functions using the sum of squares decomposition. InProceedings of the 41st IEEE Conference on Decision and Control, 2002., volume 3, pages 3482–3487, 2002
work page 2002
-
[18]
G. Papamakarios, T. Pavlakou, and I. Murray. Masked autoregressive flow for density estimation. In I. Guyon, U. V . Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan, and R. Garnett, editors,Advances in Neural Information Processing Systems, volume 30. Curran Associates, Inc., 2017
work page 2017
-
[19]
D. E. Rumelhart, G. E. Hinton, and R. J. Williams. Learning representations by back-propagating errors. InNature, volume 323(6088), pages 533–536. Springer Science and Business Media LLC, Oct. 1986
work page 1986
-
[20]
T. Teshima, I. Ishikawa, K. Tojo, K. Oono, M. Ikeda, and M. Sugiyama. Coupling-based invertible neural networks are universal diffeomorphism approximators. InAdvances in Neural Information Processing Systems, volume 33, pages 3362–3373. Curran Associates, Inc., 2020
work page 2020
-
[21]
S. Wei, P. Krishnamurthy, and F. Khorrami. Neural lyapunov control for nonlinear systems with unstructured uncertainties. In2023 American Control Conference (ACC), pages 1901–1906, 2023
work page 1901
-
[22]
S. Wei, P. Krishnamurthy, and F. Khorrami. Robust neural lyapunov control for nonlinear systems with quadratically bounded disturbances. InInternational Journal of Robust and Nonlinear Control, volume 36(4), pages 2299–2311, 2025
work page 2025
-
[23]
J. Wu, A. Clark, Y . Kantaros, and Y . V orobeychik. Neural lyapunov control for discrete-time systems. InAdvances in Neural Information Processing Systems, volume 36, pages 2939–2955. Curran Associates, Inc., 2023
work page 2023
-
[24]
R. Zhou, T. Quartz, H. De Sterck, and J. Liu. Neural lyapunov control of unknown nonlinear systems with stability guarantees. InAdvances in Neural Information Processing Systems, volume 35, pages 29113–29125. Curran Associates, Inc., 2022. A Proof of Theorem 1 Proof. The proof goes by first showing that we can smoothly identify different regular level set...
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.