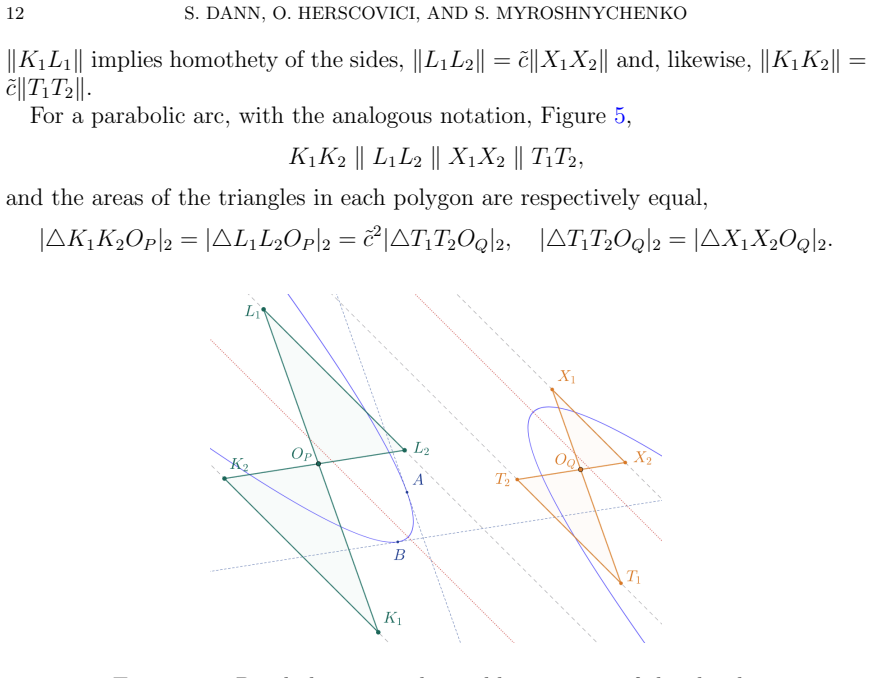
Recognition: 1 theorem link
· Lean TheoremUniqueness of Flotation and Buoyancy Surfaces for Convex Polytopes
Pith reviewed 2026-05-12 02:33 UTC · model grok-4.3
The pith
A convex polytope of uniform density different from one half is uniquely determined by its flotation surface.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We prove that a convex polytope P in R^d for d at least 2, having uniform density delta between 0 and 1, is uniquely determined by its flotation surface P_{[delta]} when floating in a liquid of density 1, provided delta is not 1/2. In the same way, the buoyancy surface C_delta P for such a polytope with given density delta uniquely determines the polytope P itself.
What carries the argument
The flotation surface P_{[delta]}, defined as the intersection of the polytope with the liquid surface at equilibrium, and the buoyancy surface C_delta P, which maps the polytope to the set of its centers of buoyancy; these surfaces serve as the unique identifiers from which the original polytope can be recovered.
If this is right
- The entire geometry of the polytope, including its shape and position, can be recovered from the flotation surface for delta not equal to 1/2.
- Buoyancy surfaces likewise allow full reconstruction of the polytope.
- The uniqueness holds in all dimensions d at least 2.
- Non-uniqueness may occur at delta equal to 1/2 due to possible symmetries.
Where Pith is reading between the lines
- If the result extends beyond polytopes, it could apply to general convex bodies with uniform density.
- Practical applications might include identifying submerged objects from their waterline or buoyancy data.
- For the special case of delta equal to 1/2, counterexamples with multiple polytopes sharing the same surface might exist, such as centrally symmetric ones.
- This uniqueness could connect to other inverse problems in convex geometry, like those involving support functions or width measurements.
Load-bearing premise
The polytope must be convex and have uniform density, with the flotation and buoyancy surfaces defined in the usual geometric manner from the density and equilibrium position.
What would settle it
Two distinct convex polytopes with the same density delta not equal to 1/2 that have identical flotation surfaces would falsify the uniqueness claim.
Figures





read the original abstract
We prove that a convex polytope $P \subset \mathbb{R}^d$, $d \ge 2$, of uniform density $\delta \in (0,1)$ floating in a liquid of density $1$, is uniquely determined by its surface of flotation $P_{[\delta]}$ whenever $\delta \neq \tfrac{1}{2}$. Analogously, we show that the buoyancy surface $\mathcal{C}_\delta P$ of a convex polytope $P$ with prescribed density $\delta \in (0,1)$ uniquely determines $P$.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proves that a convex polytope P ⊂ R^d (d ≥ 2) of uniform density δ ∈ (0,1) is uniquely determined by its flotation surface P_{[δ]} when floating in a liquid of density 1, provided δ ≠ 1/2. It further shows that the buoyancy surface C_δ P uniquely determines P for any prescribed δ ∈ (0,1). The arguments rely on the standard geometric definitions of these surfaces via liquid-plane intersections and center-of-mass conditions.
Significance. If the proofs are complete, the results constitute a solid contribution to convex geometry by establishing injectivity of the maps from polytopes to their flotation and buoyancy surfaces. This provides parameter-free uniqueness in the stated regimes and parallels other reconstruction theorems in the field. The explicit restriction to δ ≠ 1/2 correctly isolates the symmetric case where uniqueness may fail. The focus on polytopes is appropriate given their discrete structure, and the work supplies the claimed proofs as a strength.
minor comments (2)
- [§2] §2 (Definitions): The construction of the flotation surface P_{[δ]} for a general polytope would benefit from an explicit coordinate formula or algorithmic description to make the subsequent uniqueness argument easier to follow.
- [Introduction] Introduction: Adding one or two sentences comparing the result to existing uniqueness theorems (e.g., from the support function or the brightness function) would better situate the contribution within the literature.
Simulated Author's Rebuttal
We thank the referee for the positive summary, recognition of the contribution, and recommendation for minor revision. We are pleased that the work is viewed as establishing solid injectivity results in convex geometry. No specific major comments were raised, so we address the provided summary below and confirm the completeness of the proofs.
read point-by-point responses
-
Referee: The manuscript proves that a convex polytope P ⊂ R^d (d ≥ 2) of uniform density δ ∈ (0,1) is uniquely determined by its flotation surface P_{[δ]} when floating in a liquid of density 1, provided δ ≠ 1/2. It further shows that the buoyancy surface C_δ P uniquely determines P for any prescribed δ ∈ (0,1). The arguments rely on the standard geometric definitions of these surfaces via liquid-plane intersections and center-of-mass conditions.
Authors: This is an accurate summary of our main theorems. The manuscript contains complete proofs of both uniqueness statements for convex polytopes, based precisely on the standard definitions of the surfaces via supporting hyperplanes and center-of-mass conditions. We have no changes to make in response to this description. revision: no
Circularity Check
No significant circularity; uniqueness theorem is self-contained
full rationale
The paper states a direct uniqueness theorem: convex polytopes of uniform density δ ≠ 1/2 are uniquely recovered from their flotation surface P_[δ] (and analogously from the buoyancy surface) via standard geometric definitions of center-of-mass and liquid-plane intersection. No derivation step reduces by construction to its own inputs, no parameters are fitted then renamed as predictions, and no load-bearing uniqueness is imported solely via self-citation. The argument is presented as following from the definitions without ansatz smuggling or renaming of known results, rendering the claim independent of the listed circularity patterns.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption P is a convex polytope in R^d for d ≥ 2
- domain assumption Uniform density δ ∈ (0,1) with δ ≠ 1/2 for the flotation case
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearWe prove that a convex polytope P ⊂ R^d ... is uniquely determined by its surface of flotation P_[δ] whenever δ ≠ 1/2. Analogously ... the buoyancy surface C_δP ... uniquely determines P.
Reference graph
Works this paper leans on
-
[1]
Archimedes, The works of Archimedes, translated by T. Heath, Dover 2002
work page 2002
-
[2]
On flotation, stability and related questions: A survey
M. Alfonseca, A. Stancu, D. Ryabogin, V. Yaskin, “On flotation, stability and related questions: A survey”, to appear in New Probes into Discrete and Convex Geometry (J. Pach and G. Toth, eds.), Bolyai Society Mathematical Studies, Vol.32, Springer-Verlag, Berlin
-
[3]
Characterizations of balls and ellipsoids by infinitesimal homothetic conditions
M. Alfonseca, D. Ryabogin, A. Stancu, V. Yaskin, “Characterizations of balls and ellipsoids by infinitesimal homothetic conditions”, Acta Math. Sci. Ser. B (Engl. Ed.)45, no. 1, 280–290 (2025)
work page 2025
-
[4]
Carousels, Zindler curves and the floating body problem
J. Bracho, L. Montejano, D. Oliveros, “Carousels, Zindler curves and the floating body problem”, Period. Math. Hungar49(2004), 9–23. 16 S. DANN, O. HERSCOVICI, AND S. MYROSHNYCHENKO
work page 2004
-
[5]
Theory of bodies floating in liquids in equilibrium
A. Davidov, “Theory of bodies floating in liquids in equilibrium”, Master Thesis, Moscow State University, 1848, found in Life and works of A. Yu. Davidov, (in Russian), by N.E. Zhukovsky, P.A. Nekrasov and P.M. Pokrovsky, Math. Sb.15(1890), 1–57
-
[6]
Applications de G´ eom´ etrie et de M´ echanique ´ a la marine, aux ponts et chauss´ ees
C. Dupin, “Applications de G´ eom´ etrie et de M´ echanique ´ a la marine, aux ponts et chauss´ ees”, Paris (1822)
- [7]
-
[8]
H. Huang, B. Slomka, E. Werner, “Ulam floating bodies”, J. of London Math. Soc.100(2019), 425–446
work page 2019
-
[9]
A Primer of Real Analytic Functions
S. Krantz, H. R. Parks, “A Primer of Real Analytic Functions”, Birkh¨ auser (2002)
work page 2002
-
[10]
Y. Martinez-Maure, “Hedgehog Theory”, hal-04404176v1f, available at https://hal.science/hal- 04404176v1/document
-
[11]
A geometric property of the boundary of symmetric convex bodies and convexity of flotation surfaces
M. Meyer, S. Reisner, “A geometric property of the boundary of symmetric convex bodies and convexity of flotation surfaces”, Geom. Dedicata37(1991), 327–337
work page 1991
-
[12]
On polytopes with congruent projections or sections
S. Myroshnychenko, D. Ryabogin, “On polytopes with congruent projections or sections”, Ad- vances in Mathematics, 2018 (325) 482–504
work page 2018
-
[13]
Calculating the area and centroid of a polygon in 2d
R. Nurnberg, “Calculating the area and centroid of a polygon in 2d”, Imperial College London (2013)
work page 2013
-
[14]
Ueber eine kennzeichnende Eigenschaft des Ellipsoides
S. P. Olovjanischnikoff, “Ueber eine kennzeichnende Eigenschaft des Ellipsoides”, Leningrad State Univ. Ann. (Uchen. Zap.),83(1941), 113–128
work page 1941
-
[15]
A negative answer to Ulam’s problem 19 from the Scottish Book
D. Ryabogin, “A negative answer to Ulam’s problem 19 from the Scottish Book”, Ann. of Math. (2)195(2022), 1111–1150
work page 2022
-
[16]
On bodies floating in equilibrium in every orientation
D. Ryabogin, “On bodies floating in equilibrium in every orientation”, Geom. Dedicata (4)217 (2023), Paper No. 70, 17 pp
work page 2023
-
[17]
Convex Bodies: The Brunn–Minkowski Theory
R. Schneider, “Convex Bodies: The Brunn–Minkowski Theory”, Encyclopedia of Mathematics and its Applications, 2nd ed. 2014
work page 2014
-
[18]
C. Sch¨ utt, E. Werner, “The convex floating body”, Math. Scand.66(1990), 275–290
work page 1990
-
[19]
Le¸ cons de M´ ecanique Analytique
C.-J. De la Vall´ ee-Poussin, “Le¸ cons de M´ ecanique Analytique”, vol II, Paris, Gautier Villars Editeur, Louvain (1925)
work page 1925
-
[20]
Floating Bodies and Illumination Bodies
E. Werner, “Floating Bodies and Illumination Bodies”, Integral Geometry and Convexity, pp. 129–140 (2006)
work page 2006
-
[21]
N.E. Zhukovskii, “Classical Mechanics”, Moscow (1936), in Russian. S. Dann, Departamento de Matem ´aticas, Universidad de los Andes, Carrera 1 #18A – 12 Bogota, 111711, Colombia Email address:s.dann@uniandes.edu.co O. Herscovici, Department of Mathematics and Computer Science, St. John’s University, 8000 Utopia Parkway, Queens, NY 11439, USA Email address...
work page 1936
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.