Recognition: 2 theorem links
· Lean TheoremOnline Learning-Based Control with Guaranteed Error Bounds for a Class of Nonlinear Systems
Pith reviewed 2026-05-12 03:14 UTC · model grok-4.3
The pith
Adaptive control using online-learned Gaussian process models guarantees exponential stability and user-defined output error bounds for first-order nonlinear systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By embedding the online-learned Gaussian process submodel into the adaptive controller and using linear matrix inequalities to find peak-to-peak gains, the authors show that the prediction error rate can be limited such that the overall output error is bounded while the closed loop remains exponentially stable.
What carries the argument
The key machinery consists of linear matrix inequalities that certify stability and compute peak-to-peak gains from the closed-loop dynamics including the Gaussian process model; these gains then set the allowable rate of model prediction error.
If this is right
- The closed-loop system exhibits exponential stability whenever the derived linear matrix inequalities are feasible.
- User-specified output error bounds are achieved by adjusting the prediction error rate limit in the disturbance error rate limiting algorithm according to the computed gains.
- The guarantees hold for the class of first-order single-input-single-output nonlinear systems to which the approach applies.
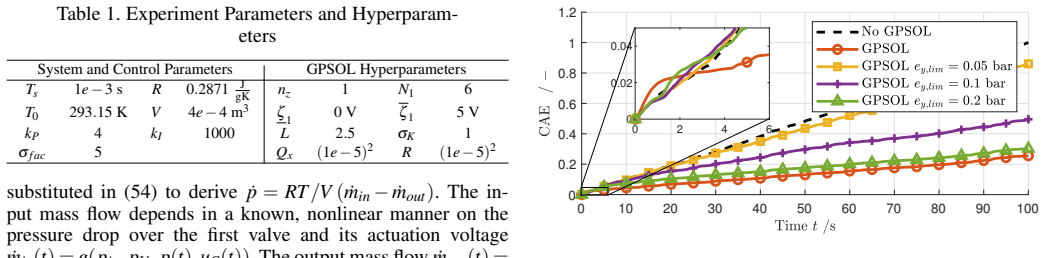
- Both simulation and experimental results on a pneumatic rig confirm that the error bounds are met in practice.
Where Pith is reading between the lines
- If the linear matrix inequality conditions can be formulated and solved for higher-order systems, the same error bounding technique would extend directly.
- The approach allows trading faster model learning, which increases prediction errors, against looser but still guaranteed output error bounds.
- Real-time implementation on embedded hardware could be tested to assess computational feasibility for similar physical plants.
Load-bearing premise
The nonlinear system is first-order and single-input single-output, and the linear matrix inequalities for stability and gain computation admit a feasible solution.
What would settle it
An experiment on a qualifying first-order single-input single-output nonlinear system in which the output error exceeds the prescribed bound, even though the prediction error rate is limited according to the peak-to-peak gain from the linear matrix inequalities, would falsify the result.
Figures
read the original abstract
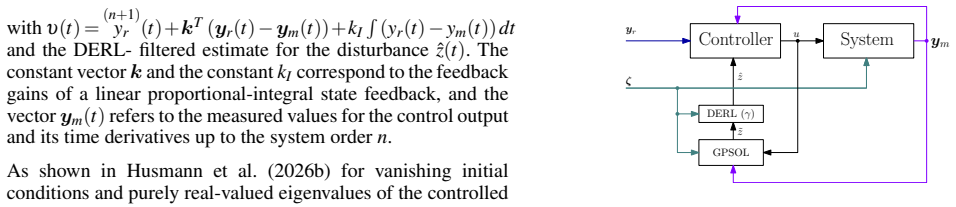
In this paper, we present a learning-based control for a class of nonlinear systems that guarantees exponential stability as well as bounded output errors. The control is based on the Gaussian Process Submodel Online Learning (GPSOL) algorithm and the Disturbance Error Rate Limiting (DERL) algorithm, both of which were developed in previous work. The GPSOL algorithm provides a method to learn Gaussian Process (GP) models for subsystems online, whereas the DERL algorithm allows to limit the rate of the prediction error of these GP models. The focus of this paper is the utilization of the GP model within an adaptive controller and the derivation of corresponding stability conditions and system peak-to-peak gains by means of linear matrix inequalities (LMIs). These peak-to-peak gains are then used to prescribe a desired prediction error rate for the DERL algorithm to achieve user-defined output error bounds. The gains and the related bounds were successfully verified using a simulation model. Furthermore, results form a successful experimental validation of the bounds and the overall control structure on a pneumatic test rig are presented. While the control scheme and error bounds proposed in this paper are limited to first-order single-input-single-output systems, an extension to certain classes of higher-order and multiple-input-multiple-output systems is expected to be forthcoming.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an online learning-based control method for a class of first-order single-input single-output nonlinear systems. It utilizes the GPSOL algorithm for online learning of Gaussian Process submodels and the DERL algorithm to limit the rate of prediction errors. The main technical contribution is the design of an adaptive controller incorporating the GP model, the derivation of closed-loop stability conditions and peak-to-peak gains from the prediction error to the output error using linear matrix inequalities (LMIs), and the use of these gains to set the prediction error rate in DERL to achieve prescribed output error bounds. The method is validated in simulation and through experiments on a pneumatic test rig.
Significance. This approach is significant because it provides a framework for guaranteeing exponential stability and user-specified error bounds in learning-based control systems, which is crucial for applications where safety and performance guarantees are required. The use of LMIs to derive the necessary gains offers a systematic way to analyze the closed-loop system. The successful experimental validation demonstrates the practical feasibility for the considered class of systems. The work builds upon previous contributions on GPSOL and DERL, extending them with stability analysis.
minor comments (3)
- [Abstract] The phrase 'results form a successful experimental validation' in the abstract contains a typographical error and should read 'results from a successful experimental validation'.
- [Abstract] The final sentence of the abstract states that an extension to higher-order and MIMO systems is 'expected to be forthcoming'; this could be clarified to indicate whether this is planned future work by the authors or simply a possibility.
- [Introduction] The introduction should include a brief, self-contained recap of the key properties of GPSOL and DERL (e.g., the exact form of the prediction-error bound provided by DERL) so that readers do not need to consult the prior references to follow the LMI derivation.
Simulated Author's Rebuttal
We thank the referee for the positive summary of our work, the recognition of its significance, and the recommendation for minor revision. The referee's description accurately captures the technical contributions, including the use of GPSOL, DERL, LMI-based stability analysis, and experimental validation on the pneumatic rig. Since no specific major comments appear in the report, we have no points requiring rebuttal or clarification at this stage.
Circularity Check
No significant circularity; new LMI analysis and validation are independent
full rationale
The paper's derivation begins with the GPSOL algorithm (from prior work) to learn a GP submodel online for a first-order SISO nonlinear system, embeds this model in an adaptive controller, derives closed-loop exponential stability and peak-to-peak gains from prediction error to output error via new LMI conditions, and then uses those gains to select a DERL prediction-error rate that enforces user-specified output bounds. The LMI step and the subsequent bound prescription constitute independent first-principles analysis that does not reduce by construction to the inputs or to the cited prior algorithms; the manuscript further supplies simulation verification of the gains/bounds and experimental confirmation on a pneumatic rig. Reliance on the earlier GPSOL/DERL results is ordinary incremental use of established tools rather than a self-definitional loop, fitted-input renaming, or load-bearing uniqueness claim that collapses the central result. No step matches any enumerated circularity pattern.
Axiom & Free-Parameter Ledger
free parameters (1)
- LMI-derived peak-to-peak gains
axioms (2)
- domain assumption The nonlinear system can be modeled with Gaussian Process submodels learned online
- domain assumption The DERL algorithm can effectively limit the prediction error rate as prescribed
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearderivation of corresponding stability conditions and system peak-to-peak gains by means of linear matrix inequalities (LMIs)... peak-to-peak gains are then used to prescribe a desired prediction error rate for the DERL algorithm
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclearquasi-linear error dynamics... polytopic vertices A1, A2... LMIs (18) and (36)
Reference graph
Works this paper leans on
-
[1]
Aschemann, H., Ritzke, J., and Schulte, H. (2009). Model-based nonlinear trajectory control of a drive chain with hydrostatic transmission. IFAC Proceedings Volumes, 42(13), 461--466. 14th IFAC Conference on Methods and Models in Automation and Robotics
work page 2009
-
[2]
str \"o m, K. and Wittenmark, B. (2008). Adaptive Control (2 rev. Dover ed.). Dover Publications
work page 2008
-
[3]
Berberich, J., Köhler, J., Müller, M.A., and Allgöwer, F. (2021). Data-driven model predictive control with stability and robustness guarantees. IEEE Transactions on Automatic Control, 66(4), 1702--1717
work page 2021
-
[4]
Boyd, S., El Ghaoui, L., Feron, E., and Balakrishnan, V. (1994). Linear Matrix Inequalities in System and Control Theory. Society for Industrial and Applied Mathematics
work page 1994
-
[5]
Bradford, E., Imsland, L., Zhang, D., and del Rio Chanona , E.A. (2020). Stochastic data-driven model predictive control using Gaussian processes. Computers & Chemical Engineering, 139, 106844
work page 2020
-
[6]
Calise, A.J. and Rysdyk, R.T. (1998). Nonlinear adaptive flight control using neural networks. IEEE Control Systems Magazine, 18(6), 14--25
work page 1998
-
[7]
Chen, W.H., Yang, J., Guo, L., and Li, S. (2016). Disturbance-observer-based control and related methods—an overview. IEEE Transactions on Industrial Electronics, 63(2), 1083--1095
work page 2016
-
[8]
Chen, Z., Renda, F., Le Gall, A., Mocellin, L., Bernabei, M., Dangel, T., Ciuti, G., Cianchetti, M., and Stefanini, C. (2025). Data-driven methods applied to soft robot modeling and control: A review. IEEE Transactions on Automation Science and Engineering, 22, 2241--2256
work page 2025
-
[9]
Cuomo, S., Di Cola, V.S., Giampaolo, F., Rozza, G., Raissi, M., and Piccialli, F. (2022). Scientific machine learning through physics--informed neural networks: Where we are and what’s next. Journal of Scientific Computing, 92(3), 88
work page 2022
-
[10]
Gr \"o tschel, M., Lov \'a sz, L., and Schrijver, A. (1993). The Ellipsoid Method, 64--101. Springer Berlin Heidelberg, Berlin, Heidelberg
work page 1993
-
[11]
Haseltine, E.L. and Rawlings, J.B. (2005). Critical evaluation of extended Kalman filtering and moving-horizon estimation. Industrial & Engineering Chemistry Research, 44(8), 2451--2460
work page 2005
-
[12]
Huber, M.F. (2013). Recursive Gaussian process regression. In 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, 3362--3366
work page 2013
- [13]
-
[14]
Husmann, R., Weishaupt, S., and Aschemann, H. (2025 b ). Recursive Gaussian process regression with integrated monotonicity assumptions for control applications. In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics - Volume 1: ICINCO. INSTICC, SciTePress
work page 2025
- [15]
- [16]
-
[17]
Julier, S.J. and Uhlmann, J.K. (1997). A new extension of the Kalman filter to nonlinear systems. In Proc. of AeroSense: The 11th Int. Symp. on Aerospace/Defence Sensing Simulation and Controls
work page 1997
-
[18]
Khalil, H.K. and Grizzle, J.W. (2002). Nonlinear systems, volume 3. Prentice hall Upper Saddle River, NJ
work page 2002
-
[19]
Krstic, M., Kokotovic, P.V., and Kanellakopoulos, I. (1995). Nonlinear and Adaptive Control Design. John Wiley & Sons, Inc., USA, 1st edition
work page 1995
-
[20]
L \" o fberg, J. (2004). Yalmip : A toolbox for modeling and optimization in matlab. In In Proceedings of the CACSD Conference. Taipei, Taiwan
work page 2004
-
[21]
Lutter, M., Ritter, C., and Peters, J. (2019). Deep lagrangian networks: Using physics as model prior for deep learning. In 7th International Conference on Learning Representations (ICLR). ICLR
work page 2019
-
[22]
Nguyen, N.T. (2018). Model-Reference Adaptive Control. Springer Cham
work page 2018
-
[23]
Scherer, C. and Weiland, S. (2015). Linear matrix inequalities in control. Lecture notes, Department of Mathematics, University of Stuttgart, Germany
work page 2015
-
[24]
Scholl, P., Iskandar, M., Wolf, S., Lee, J., Bacho, A., Dietrich, A., Albu-Schäffer, A., and Kutyniok, G. (2024). Learning-based adaption of robotic friction models. Robotics and Computer-Integrated Manufacturing, 89, 102780
work page 2024
-
[25]
Sch \"u rch, M., Azzimonti, D., Benavoli, A., and Zaffalon, M. (2020). Recursive estimation for sparse Gaussian process regression. Automatica, 120
work page 2020
-
[26]
Sena, H.J., da Silva, F.V., and Fileti, A.M.F. (2021). ANN model adaptation algorithm based on extended Kalman filter applied to ph control using mpc. Journal of Process Control, 102, 15--23
work page 2021
-
[27]
Sturm, J.F. (1999). Using sedumi 1.02, a matlab toolbox for optimization over symmetric cones. Optimization Methods and Software, 11(1-4), 625--653
work page 1999
-
[28]
Wache, A. and Aschemann, H. (2021). Self-tuning of adaptive backstepping control for reference tracking. IFAC-PapersOnLine, 54(14), 313--318. 3rd IFAC Conference on Modelling, Identification and Control of Nonlinear Systems MICNON 2021
work page 2021
-
[29]
Wietzke, T., Landgraf, D., and Graichen, K. (2025). Application of stochastic model predictive control for building energy systems using latent force models. at - Automatisierungstechnik, 73(6), 441--450
work page 2025
-
[30]
Liu, Liuchen and Zhu, Tong and Gao, Naiping and Gan, Zhongxue , year =
-
[31]
Keller, Martin and Neumann, Marcel and Eichler, Katharina and Pischinger, Stefan and Abel, Dirk and Albin, Thivaharan , booktitle=. Model Predictive Control for an Organic Rankine Cycle System applied to a Heavy-Duty Diesel Engine , year=
-
[32]
A dynamic model of a vapor compression cycle with shut-down and start-up operations , journal =. 2010 , issn =
work page 2010
-
[33]
Multiphysics Modeling , publisher =
5 - Stabilization schemes for highly nonlinear problems , editor =. Multiphysics Modeling , publisher =
- [34]
-
[35]
Christa L\"udecke and Dorothea L\"udecke , YEAR =. Thermodynamik (in German) , SUBTITLE =
-
[36]
A comparative analysis of dynamic evaporator models for organic Rankine cycle waste heat recovery systems , journal =. 2020 , author =
work page 2020
- [37]
-
[38]
Desideri, Adriano and Dechesne, Bertrand and Wronski, Jorrit and Van den Broek, Martijn and Gusev, Sergei and Lemort, Vincent and Quoilin, Sylvain , TITLE =. Energies , VOLUME =. 2016 , NUMBER =
work page 2016
-
[39]
and Wronski, Jorrit and Quoilin, Sylvain and Lemort, Vincent , title =
Bell, Ian H. and Wronski, Jorrit and Quoilin, Sylvain and Lemort, Vincent , title =. Industrial & Engineering Chemistry Research , volume =
-
[40]
Jakob Munch Jensen and Hubertus Tummescheit , title=. Modelica 2002 Proceedings
work page 2002
- [41]
-
[42]
D. Schmidt and C. Goetschkes and C. Pollerberg , title=. 2020 , address=
work page 2020
-
[43]
Regelungstechnik 2 (in German) , SUBTITLE =
Jan Lunze , YEAR =. Regelungstechnik 2 (in German) , SUBTITLE =
-
[44]
Optimierung (in German) , SUBTITLE =
Markos Papageorgiou and Marion Leibold and Martin Buss , YEAR =. Optimierung (in German) , SUBTITLE =
-
[45]
Krener and Kayo Ide , booktitle=
Arthur J. Krener and Kayo Ide , booktitle=. Measures of unobservability , year=
-
[46]
Bastian Ritter and Edwin Mora and Axel Schild , title =. 2018 , publisher =
work page 2018
- [47]
-
[48]
A. Conley and M.E. Salgado , booktitle=. Gramian based interaction measure , year=
-
[49]
B. Moore , journal=. Principal component analysis in linear systems: Controllability, observability, and model reduction , year=
-
[50]
Thomas Maurer , YEAR =. K
-
[51]
Dynamic Modeling of a Vapor Compression Cycle , journal =
Ricus Husmann and Harald Aschemann , keywords =. Dynamic Modeling of a Vapor Compression Cycle , journal =. 2022 , note =
work page 2022
-
[52]
Analysis and Qualitative Observability of Two Vapor Compression Cycle Models , year=
Ricus Husmann and Harald Aschemann , booktitle=. Analysis and Qualitative Observability of Two Vapor Compression Cycle Models , year=
- [53]
-
[54]
Jackson B. Marcinichen and Thiago N. del Holanda and Claudio Melo , booktitle=. A dual
-
[55]
Cornell University Library , year =
Qingfu Zhang and Xu Zhang , title =. Cornell University Library , year =
-
[56]
Neera Jain and Andrew G. Alleyne , booktitle=. Comparison of. 2009 , pages=
work page 2009
-
[57]
Nonlinear Model Order Reduction for Feedforward Control of an Air Conditioning System in an Electric Vehicle , journal =. 2022 , note =
work page 2022
- [58]
-
[59]
Flatness-Based Control for an Internal Combustion Engine Cooling System , year=
Aschemann, Prabel , booktitle=. Flatness-Based Control for an Internal Combustion Engine Cooling System , year=
- [60]
-
[61]
Nonlinear Control of a Vapor Compression Cycle by Input-Output Linearisation , year=
Ricus Husmann and Sven Weishaupt and Harald Aschemann , booktitle=. Nonlinear Control of a Vapor Compression Cycle by Input-Output Linearisation , year=
-
[62]
Cascaded Sliding-Mode Control of a Vapor Compression Cycle , year=
Ricus Husmann and Sven Weishaupt and Harald Aschemann , booktitle=. Cascaded Sliding-Mode Control of a Vapor Compression Cycle , year=
- [63]
-
[64]
Handbook of Discrete and Computational Geometry , publisher =
Martin Dyer and Bernd G\". Handbook of Discrete and Computational Geometry , publisher =
- [65]
-
[66]
Mathematical Programming Computation , volume =
Joel A E Andersson and Joris Gillis and Greg Horn and James B Rawlings and Moritz Diehl , title =. Mathematical Programming Computation , volume =. 2019 , publisher =
work page 2019
-
[67]
Eduardo D. Sontag , chapter =. Nonlinear and Optimal Control Theory , publisher =
- [68]
-
[69]
Gilbert and Ilya Kolmanovsky , title =
Jelmer G. Gilbert and Ilya Kolmanovsky , title =. International Journal of Robust and Nonlinear Control , volume =
-
[70]
A survey of industrial model predictive control technology , journal =. 2003 , issn =
work page 2003
-
[71]
Ahmad Taher Azar and Fernando E. Serrano. Design and Modeling of Anti Wind Up PID Controllers. Complex System Modelling and Control Through Intelligent Soft Computations. 2015
work page 2015
-
[72]
Optimal Control with Engineering Applications , author=. 2007 , publisher=
work page 2007
-
[73]
A moving-boundary formulation for modeling time-dependent two-phase flows , journal =. 1992 , author =
work page 1992
-
[74]
Accurate low-order dynamic model of a compact plate heat exchanger , journal =. 2013 , author =
work page 2013
-
[75]
A Moving Boundary Modeling Approach for Heat Exchangers with Binary Mixtures , volume =
Donghun Kim and Davide Ziviani and James Braun and Eckhard Groll , year =. A Moving Boundary Modeling Approach for Heat Exchangers with Binary Mixtures , volume =
-
[76]
Sigurd Skogestad and Manfred Morari and John C. Doyle , journal=. Robust control of ill-conditioned plants: high-purity distillation , year=
-
[77]
Control of a Vapor Compression Cycle Based on a Moving-Boundary Model
Ricus Husmann and Sven Weishaupt and Harald Aschemann. Control of a Vapor Compression Cycle Based on a Moving-Boundary Model
-
[78]
Control of a Vapor Compression Cycle Based on a Moving-Boundary Model , year=
Ricus Husmann and Sven Weishaupt and Harald Aschemann , booktitle=. Control of a Vapor Compression Cycle Based on a Moving-Boundary Model , year=
-
[79]
Nonlinear Control of a Vapor Compression Cycle Based on a Partial
Husmann, Ricus and Weishaupt, Sven and Aschemann, Harald , booktitle=. Nonlinear Control of a Vapor Compression Cycle Based on a Partial. 2024 , volume=
work page 2024
-
[80]
Tracking Control for Thermofluidic Systems With Input Constraints and Relative Degree One , year=
Husmann, Ricus and Aschemann, Harald , booktitle=. Tracking Control for Thermofluidic Systems With Input Constraints and Relative Degree One , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.