Recognition: 2 theorem links
· Lean TheoremSeparation Logic for Verifying Physical Collisions of CNC Programs
Pith reviewed 2026-05-12 05:05 UTC · model grok-4.3
The pith
Separation logic verifies CNC collisions by modeling the workspace as a spatial heap where tool paths must be disjoint.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
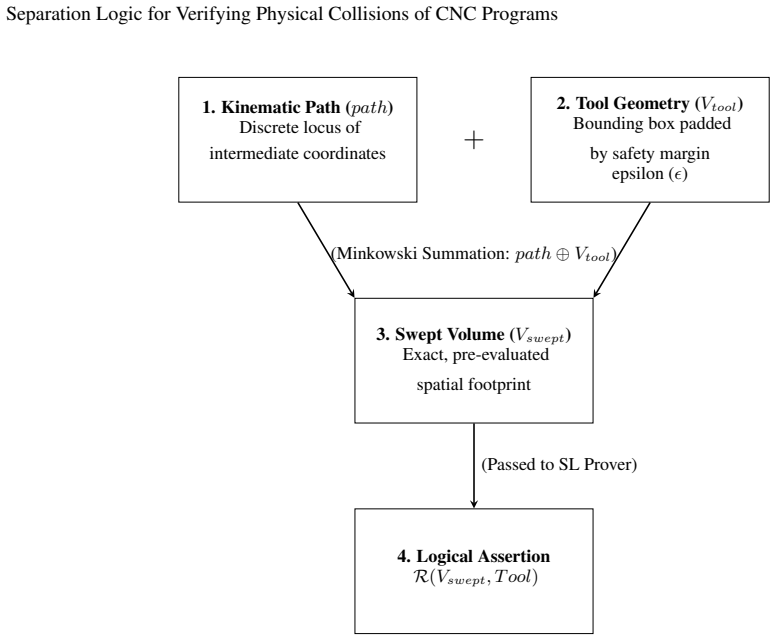
By mapping tool trajectories and safety buffers into a discrete spatial model, physical collisions become logical spatial data races that can be detected by the failure of separating conjunction to establish disjointness. The parser-prover handshake decouples kinematics from the logic engine, allowing standard separation-logic triples to certify safety. In collaborative settings, concurrent separation logic verifies hand-offs as formal ownership transfers, yielding a mathematically grounded alternative to simulation-based testing.
What carries the argument
The Spatial Heap, a discrete model that treats physical occupancy as a managed logical resource, together with the Parser-Prover Handshake that feeds machine trajectories into separation-logic triples.
If this is right
- Safety verification becomes independent of repetitive geometric re-simulation whenever machining requirements change.
- Collaborative CNC environments can be checked by treating machine hand-offs as ownership transfers in concurrent separation logic.
- Zero-collision manufacturing acquires a formal foundation that scales with program complexity rather than simulation effort.
- Collisions are detected at the level of logical resource disjointness rather than numerical geometry.
Where Pith is reading between the lines
- The discrete mapping could be automated inside existing CNC post-processors to provide pre-execution checks.
- The approach may generalize to other path-planning domains such as robotic assembly where physical overlaps must be excluded.
- A direct comparison of verification runtime against commercial collision simulators on standard G-code benchmarks would quantify the claimed scalability gain.
Load-bearing premise
Tool trajectories and safety buffers can be mapped into a discrete spatial model prior to evaluation without losing critical continuous-time collision information or introducing false negatives.
What would settle it
Run the framework on a CNC program whose continuous-time simulation shows a collision that the discrete spatial model does not flag as a data-race violation.
Figures



read the original abstract
Safety verification in Computer Numerical Control (CNC) machining has traditionally relied on simulation-based methods that require repetitive tests when requirements change. This paper introduces a formal verification framework that conceptualizes the physical CNC workspace as a Spatial Heap, treating physical occupancy as a managed logical resource. Central to our approach is a Parser-Prover Handshake that decouples machine kinematics from formal logic. By mapping tool trajectories and safety buffers into a discrete spatial model prior to evaluation, the framework enables the use of Separation Logic (SL) to verify safety via formal triples. Within this model, physical collisions are redefined as logical Spatial Data Races, detected through the failure of the separating conjunction to establish disjointness. Furthermore, we extend the methodology to collaborative environments using Concurrent Separation Logic (CSL), where physical hand-offs are verified as formal ownership transfers. This approach provides a scalable, mathematically grounded alternative to geometric simulation, offering a foundation for autonomous, zero-collision manufacturing.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a Separation Logic (SL) framework for verifying physical collisions in CNC programs. It models the workspace as a Spatial Heap, maps tool trajectories and safety buffers to a discrete spatial model via a Parser-Prover Handshake, redefines collisions as Spatial Data Races detected by failure of the separating conjunction, and extends the approach to Concurrent Separation Logic (CSL) for collaborative hand-offs. The central claim is that this provides a scalable, formal alternative to geometric simulation for zero-collision manufacturing.
Significance. If the discretization operator preserves all continuous-time collisions and the SL triples are shown sound for the spatial model, the framework could supply a mathematically grounded verification method that avoids repeated simulations when requirements change. The manuscript supplies no machine-checked proofs, reproducible examples, or falsifiable theorems, so the significance remains prospective rather than demonstrated.
major comments (3)
- [Abstract] Abstract and proposed framework: the claim that physical collisions are detected as failures of the separating conjunction requires a formal definition of the heap construction function and a preservation theorem relating continuous kinematics to the discrete Spatial Heap; none is supplied, leaving open the possibility that collisions between sample points or due to buffer overlap remain invisible to the logic.
- [Proposed Framework] Parser-Prover Handshake description: the decoupling of machine kinematics from formal logic is presented only conceptually; without a precise definition of the mapping operator or an example triple showing how a trajectory is encoded as heap assertions, it is impossible to confirm that the approach detects all relevant collisions.
- [Collaborative Environments] Extension to CSL: the claim that physical hand-offs are verified as ownership transfers rests on standard CSL axioms, but no soundness argument or example is given showing that the spatial model respects the required disjointness and transfer rules for concurrent CNC operations.
minor comments (2)
- [Introduction] The terms 'Spatial Heap', 'Spatial Data Race', and 'Parser-Prover Handshake' are introduced without prior reference to related work on spatial logics or resource logics for physical systems; adding such citations would clarify novelty.
- [Spatial Heap Model] Notation for the discrete spatial model (e.g., how buffers and trajectories become heap cells) is described at a high level; a small illustrative diagram or pseudocode would improve readability.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments, which identify key areas where the formal foundations of our framework require strengthening. We respond point by point to the major comments and indicate the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract and proposed framework: the claim that physical collisions are detected as failures of the separating conjunction requires a formal definition of the heap construction function and a preservation theorem relating continuous kinematics to the discrete Spatial Heap; none is supplied, leaving open the possibility that collisions between sample points or due to buffer overlap remain invisible to the logic.
Authors: We agree that the manuscript currently presents the core claim at a conceptual level and does not yet supply an explicit definition of the heap construction function or a preservation theorem. This leaves open questions about coverage of continuous-time collisions, sample-point gaps, and buffer overlaps. In the revised manuscript we will add a precise definition of the discretization operator that maps continuous trajectories and safety buffers to the Spatial Heap, together with a preservation theorem stating that every collision detectable in the continuous kinematics produces a failure of the separating conjunction in the discrete model. The theorem will incorporate explicit safety margins to ensure buffer overlaps and inter-sample collisions are captured. revision: yes
-
Referee: [Proposed Framework] Parser-Prover Handshake description: the decoupling of machine kinematics from formal logic is presented only conceptually; without a precise definition of the mapping operator or an example triple showing how a trajectory is encoded as heap assertions, it is impossible to confirm that the approach detects all relevant collisions.
Authors: The Parser-Prover Handshake is introduced conceptually to highlight the separation between kinematic parsing and logical reasoning. We acknowledge that a precise mapping operator and a concrete example triple are needed to demonstrate collision detection. The revision will include a formal definition of the mapping operator that translates tool trajectories and buffers into spatial assertions (e.g., points and regions in the heap). We will also supply an illustrative safety triple of the form {P} CNC-program {Q} in which P asserts disjoint spatial regions and the failure of * detects a potential collision, thereby making the detection mechanism explicit. revision: yes
-
Referee: [Collaborative Environments] Extension to CSL: the claim that physical hand-offs are verified as ownership transfers rests on standard CSL axioms, but no soundness argument or example is given showing that the spatial model respects the required disjointness and transfer rules for concurrent CNC operations.
Authors: The extension to Concurrent Separation Logic relies on the standard axioms for ownership transfer, yet the manuscript does not provide a tailored soundness argument or example for the spatial model. We will add a short soundness sketch in the revision showing that the Spatial Heap satisfies the frame rule and the required disjointness conditions because physical workspaces remain spatially separated. We will also include a small collaborative hand-off example formalized as a CSL triple that illustrates the transfer of spatial ownership between CNC agents. revision: yes
Circularity Check
No circularity; standard SL application to new domain
full rationale
The paper applies established Separation Logic and Concurrent Separation Logic axioms to model CNC workspaces as a Spatial Heap, with collisions detected via failure of separating conjunction. No derivation step reduces to its own inputs by construction, no parameters are fitted and then relabeled as predictions, and no load-bearing self-citations or author-specific uniqueness theorems are used. The Parser-Prover Handshake and discrete mapping are presented conceptually without equations that loop back to the target result; the framework is self-contained as a domain application of pre-existing formal methods.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Standard Separation Logic axioms for separating conjunction and disjointness
invented entities (3)
-
Spatial Heap
no independent evidence
-
Spatial Data Race
no independent evidence
-
Parser-Prover Handshake
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclearBy mapping tool trajectories and safety buffers into a discrete spatial model prior to evaluation, the framework enables the use of Separation Logic (SL) to verify safety via formal triples... physical collisions are redefined as logical Spatial Data Races, detected through the failure of the separating conjunction
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclearThe spatial heap h is modeled as a finite partial function mapping discrete physical coordinates to their specific occupancy status: h:Z^3 ⇀ status
Forward citations
Cited by 2 Pith papers
-
Correct-by-Construction G-Code Generation: A Neuro-Symbolic Approach via Separation Logic
A neuro-symbolic system uses separation logic to model physical collisions as spatial data races, feeding proof failures back as bounding-box corrections to a neural G-code generator for verified output.
-
Correct-by-Construction G-Code Generation: A Neuro-Symbolic Approach via Separation Logic
A neuro-symbolic framework combines neural G-code generation with separation logic verification to create self-correcting, verified manufacturing instructions by treating collisions as spatial data races.
Reference graph
Works this paper leans on
-
[1]
Separation logic: A logic for shared mutable data structures
John Charles Reynolds. Separation logic: A logic for shared mutable data structures. InProceedings 17th Annual IEEE Symposium on Logic in Computer Science, pages 55–74. IEEE, 2002. 16 Separation Logic for Verifying Physical Collisions of CNC Programs
work page 2002
-
[2]
Symbolic execution with separation logic
Josh Berdine, Cristiano Calcagno, and Peter W O’hearn. Symbolic execution with separation logic. InAsian Symposium on Programming Languages and Systems, pages 52–68. Springer, 2005
work page 2005
-
[3]
Resources, concurrency and local reasoning
Peter W O’hearn. Resources, concurrency and local reasoning. InInternational Conference on Concurrency Theory, pages 49–67. Springer, 2004
work page 2004
-
[4]
Mechanized semantics for correctness of the rs274 additive manufacturing command language
Mohit Tekriwal and Matthew Sottile. Mechanized semantics for correctness of the rs274 additive manufacturing command language. InNASA Formal Methods Symposium, pages 341–359. Springer, 2025
work page 2025
-
[5]
An axiomatic basis for computer programming.Communications of the ACM, 12(10):576–580, 1969
Charles Antony Richard Hoare. An axiomatic basis for computer programming.Communications of the ACM, 12(10):576–580, 1969
work page 1969
-
[6]
On the complexity of pointer arithmetic in separation logic
James Brotherston and Max Kanovich. On the complexity of pointer arithmetic in separation logic. InAsian Symposium on Programming Languages and Systems, pages 329–349. Springer, 2018
work page 2018
-
[7]
Tractable reasoning in a fragment of separation logic
Byron Cook, Christoph Haase, Joël Ouaknine, Matthew Parkinson, and James Worrell. Tractable reasoning in a fragment of separation logic. InInternational Conference on Concurrency Theory, pages 235–249. Springer, 2011
work page 2011
-
[8]
Spatial planning: A configuration space approach.IEEE Trans
Tomas Lozano-Perez et al. Spatial planning: A configuration space approach.IEEE Trans. Computers, 32(2):108– 120, 1983
work page 1983
-
[9]
A simple method for computing minkowski sum boundary in 3d using collision detection
Jyh-Ming Lien. A simple method for computing minkowski sum boundary in 3d using collision detection. In Algorithmic Foundation of Robotics VIII: Selected Contributions of the Eight International Workshop on the Algorithmic Foundations of Robotics, pages 401–415. Springer, 2009
work page 2009
-
[10]
Minkowski penalties: Robust differentiable constraint enforcement for vector graphics
Jiˇrí Minarˇcík, Sam Estep, Wode Ni, and Keenan Crane. Minkowski penalties: Robust differentiable constraint enforcement for vector graphics. InACM SIGGRAPH 2024 Conference Papers, pages 1–12, 2024
work page 2024
-
[11]
Concurrent separation logic.ACM SIGLOG News, 3(3):47–65, 2016
Stephen Brookes and Peter W O’Hearn. Concurrent separation logic.ACM SIGLOG News, 3(3):47–65, 2016
work page 2016
-
[12]
Computing swept volumes.The Journal of Visualization and Computer Animation, 11(2):69–82, 2000
Steven Abrams and Peter K Allen. Computing swept volumes.The Journal of Visualization and Computer Animation, 11(2):69–82, 2000
work page 2000
-
[13]
The pointer assertion logic engine.ACM SIGPLAN Notices, 36(5):221–231, 2001
Anders Møller and Michael I Schwartzbach. The pointer assertion logic engine.ACM SIGPLAN Notices, 36(5):221–231, 2001
work page 2001
-
[14]
Charis Stamouli, Lars Lindemann, and George Pappas. Recursively feasible shrinking-horizon mpc in dynamic environments with conformal prediction guarantees. In6th Annual Learning for Dynamics & Control Conference, pages 1330–1342. PMLR, 2024
work page 2024
-
[15]
Algorithm for computer control of a digital plotter
Jack E Bresenham. Algorithm for computer control of a digital plotter. InSeminal graphics: pioneering efforts that shaped the field, pages 1–6. ACM, 1998
work page 1998
-
[16]
Local reasoning about the presence of bugs: Incorrectness separation logic
Azalea Raad, Josh Berdine, Hoang-Hai Dang, Derek Dreyer, Peter O’Hearn, and Jules Villard. Local reasoning about the presence of bugs: Incorrectness separation logic. InInternational Conference on Computer Aided Verification, pages 225–252. Springer, 2020. 17
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.