Recognition: 2 theorem links
· Lean TheoremCorrect-by-Construction G-Code Generation: A Neuro-Symbolic Approach via Separation Logic
Pith reviewed 2026-05-13 03:00 UTC · model grok-4.3
The pith
A neural G-code generator and separation logic verifier form a loop that turns proof failures into spatial corrections for verified manufacturing code.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
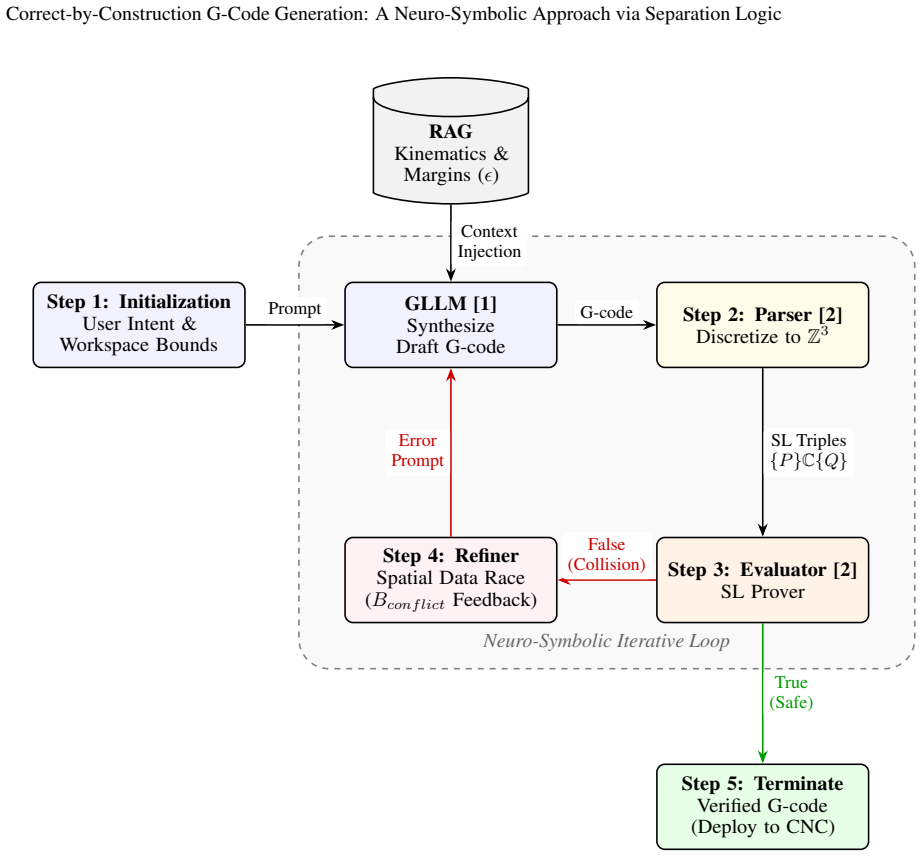
By representing G-code paths inside a spatial heap model, the framework converts any physical overlap into a logical violation of separating conjunction. The verifier then extracts the smallest enclosing box around the violation and returns it to the GLLM, which uses the box to revise its output in the following round. This produces a closed self-correction loop that continues until the generated G-code satisfies the separation-logic invariants for safe, non-intersecting space usage.
What carries the argument
The Spatial Heap model inside separation logic, which encodes tool paths as allocated regions and detects violations of the separating conjunction as spatial data races, then condenses each failure into a minimal bounding box for direct feedback to the generator.
If this is right
- G-code for complex parts can be produced with fewer manual corrections.
- The self-correcting cycle supports safer autonomous manufacturing by catching collisions before execution.
- Formal proof failures become usable spatial instructions rather than opaque error messages.
- The same generator-verifier pairing can be reused across different machine geometries without rewriting the verifier.
Where Pith is reading between the lines
- The same bounding-box feedback technique could be tested on other spatial planning problems such as robotic arm trajectories.
- If the minimal boxes prove too coarse in some geometries, the framework might need a finer-grained extraction step from the separation logic proof tree.
- The approach suggests a general pattern for pairing any neural code generator with a domain-specific verifier that can return localized counterexamples.
Load-bearing premise
That proof failures in the separation logic verifier can be reliably condensed into minimal bounding boxes that serve as precise, actionable spatial directives for the GLLM generator's iterative self-correction.
What would settle it
Apply the system to a G-code task containing known spatial conflicts; observe whether the bounding-box feedback drives the generator to a verified, collision-free output within a bounded number of iterations or whether the loop fails to converge.
Figures



read the original abstract
This paper proposes a neuro-symbolic framework for G-code generation by integrating the GLLM neural method (Abdelaal et al., 2025) with our established Separation Logic (SL) verifier. We introduce a two-component architecture where GLLM serves as a creative generator and the SL Prover, utilizing the Spatial Heap model, acts as a deterministic verifier. By defining physical collisions as logical Spatial Data Races - violations of the separating conjunction in SL - the framework translates proof failures into structured mathematical feedback. These failures are condensed into minimal bounding boxes that act as precise spatial directives for GLLM's iterative self-correction. This synergy establishes a self-correcting generative cycle that reduces the need for manual oversight, supporting the production of verified G-code to enhance safety in autonomous manufacturing.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a neuro-symbolic framework for G-code generation by integrating the GLLM neural method as a creative generator with an established Separation Logic verifier that employs a Spatial Heap model. Physical collisions are defined as spatial data races (violations of the separating conjunction), with proof failures condensed into minimal bounding boxes that provide spatial directives for iterative self-correction by the GLLM, thereby creating a self-correcting generative cycle to produce verified G-code with reduced manual oversight.
Significance. If the translation from separation-logic proof failures to minimal bounding boxes is shown to be sound, minimal, and sufficient to guide repairs, the approach could meaningfully advance automated safety in manufacturing by enabling correct-by-construction G-code generation through a closed neuro-symbolic loop.
major comments (2)
- [Abstract] Abstract: The claim that proof failures are 'condensed into minimal bounding boxes that act as precise spatial directives' for GLLM self-correction is asserted without any definition of the Spatial Heap encoding of tool paths, any algorithm for extracting or minimizing the boxes, or any argument that every physical collision maps to a detectable separating-conjunction violation. This mapping is load-bearing for the self-correcting-cycle claim.
- [Abstract] Abstract: No soundness argument or termination guarantee is supplied for the iterative loop; if the extracted boxes lose geometric detail or become ambiguous, the cycle cannot be guaranteed to terminate with verified G-code. This directly affects the central 'correct-by-construction' assertion.
minor comments (2)
- The citation to 'Abdelaal et al., 2025' should be clarified (preprint, in press, etc.) and the full reference supplied.
- A diagram or pseudocode sketch of the two-component architecture and the feedback loop from verifier to generator would improve readability.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive feedback on our manuscript. We address each major comment point by point below and commit to revisions that strengthen the presentation of the neuro-symbolic framework.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that proof failures are 'condensed into minimal bounding boxes that act as precise spatial directives' for GLLM self-correction is asserted without any definition of the Spatial Heap encoding of tool paths, any algorithm for extracting or minimizing the boxes, or any argument that every physical collision maps to a detectable separating-conjunction violation. This mapping is load-bearing for the self-correcting-cycle claim.
Authors: We acknowledge that the abstract asserts the high-level claim without including the supporting definitions and arguments. In the revision, we will expand the abstract with a concise reference to the Spatial Heap model and add a dedicated subsection that formally defines the encoding of tool paths as spatial heaps, presents the algorithm for extracting minimal bounding boxes from proof failures (leveraging the minimal unsatisfiable core), and provides an argument that physical collisions correspond to separating-conjunction violations. These additions will make the mapping explicit and substantiate the self-correcting cycle. revision: yes
-
Referee: [Abstract] Abstract: No soundness argument or termination guarantee is supplied for the iterative loop; if the extracted boxes lose geometric detail or become ambiguous, the cycle cannot be guaranteed to terminate with verified G-code. This directly affects the central 'correct-by-construction' assertion.
Authors: We agree that the manuscript describes the iterative loop conceptually but does not supply a formal soundness argument or termination guarantee. We will add a new subsection providing a soundness argument based on the deterministic and sound nature of the SL verifier for the spatial fragment, showing that each iteration reduces violations when guided by the bounding boxes. We will also include a termination analysis under the condition that the GLLM can produce valid configurations, along with a discussion of detail loss in boxes and mitigation via refined localization. This will reinforce the correct-by-construction claim. revision: yes
Circularity Check
Integration of prior GLLM and SL verifier components without self-referential reduction
full rationale
The paper integrates the GLLM neural generator (cited as Abdelaal et al., 2025) with the authors' established Separation Logic verifier using the Spatial Heap model. The abstract defines physical collisions as Spatial Data Races (violations of separating conjunction) and states that proof failures are condensed into minimal bounding boxes for iterative self-correction, but supplies no equations, fitted parameters, or self-definitional mappings that reduce the claimed self-correcting cycle to its inputs by construction. The central claim is an architectural integration whose validity rests on the independent soundness of the two cited components rather than any renaming, ansatz smuggling, or prediction that is forced by prior results within this paper. This is a normal non-circular integration of existing work.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Separation logic axioms for spatial heap and separating conjunction
invented entities (1)
-
Spatial Heap model
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
discretized path step-by-step... discrete 3D integer domain (Z3)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Mohamed Abdelaal, Samuel Lokadjaja, and Gilbert Engert. Gllm: Self-corrective g-code generation using large language models with user feedback.arXiv preprint arXiv:2501.17584, 2025
-
[2]
Separation Logic for Verifying Physical Collisions of CNC Programs
Yeonseok Lee. Separation logic for verifying physical collisions of CNC programs.arXiv preprint arXiv:2605.10437, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[3]
Separation logic: A logic for shared mutable data structures
John Charles Reynolds. Separation logic: A logic for shared mutable data structures. InProceedings 17th Annual IEEE Symposium on Logic in Computer Science, pages 55–74. IEEE, 2002
work page 2002
-
[4]
Resources, concurrency and local reasoning
Peter W O’hearn. Resources, concurrency and local reasoning. InInternational Conference on Concurrency Theory, pages 49–67. Springer, 2004
work page 2004
-
[5]
On the complexity of pointer arithmetic in separation logic
James Brotherston and Max Kanovich. On the complexity of pointer arithmetic in separation logic. InAsian Symposium on Programming Languages and Systems, pages 329–349. Springer, 2018
work page 2018
-
[6]
Spatial planning: A configuration space approach.IEEE Trans
Tomas Lozano-Perez et al. Spatial planning: A configuration space approach.IEEE Trans. Computers, 32(2):108– 120, 1983
work page 1983
-
[7]
Computing swept volumes.The Journal of Visualization and Computer Animation, 11(2):69–82, 2000
Steven Abrams and Peter K Allen. Computing swept volumes.The Journal of Visualization and Computer Animation, 11(2):69–82, 2000
work page 2000
-
[8]
Symbolic execution with separation logic
Josh Berdine, Cristiano Calcagno, and Peter W O’hearn. Symbolic execution with separation logic. InAsian Symposium on Programming Languages and Systems, pages 52–68. Springer, 2005
work page 2005
-
[9]
Habilitationsschrift, Technical University of Kaiserslautern, Kaiserslautern, Germany, 2022
Daniel Neider.Intelligent formal methods: Combining deductive and inductive reasoning to build reliable systems. Habilitationsschrift, Technical University of Kaiserslautern, Kaiserslautern, Germany, 2022
work page 2022
-
[10]
Neural model checking.Advances in Neural Information Processing Systems, 37:86375–86398, 2024
Mirco Giacobbe, Daniel Kroening, Abhinandan Pal, and Michael Tautschnig. Neural model checking.Advances in Neural Information Processing Systems, 37:86375–86398, 2024
work page 2024
-
[11]
An axiomatic basis for computer programming.Communications of the ACM, 12(10):576–580, 1969
Charles Antony Richard Hoare. An axiomatic basis for computer programming.Communications of the ACM, 12(10):576–580, 1969
work page 1969
-
[12]
Minkowski penalties: Robust differentiable constraint enforcement for vector graphics
Jiˇrí Minarˇcík, Sam Estep, Wode Ni, and Keenan Crane. Minkowski penalties: Robust differentiable constraint enforcement for vector graphics. InACM SIGGRAPH 2024 Conference Papers, pages 1–12, 2024
work page 2024
-
[13]
Concurrent separation logic.ACM SIGLOG News, 3(3):47–65, 2016
Stephen Brookes and Peter W O’Hearn. Concurrent separation logic.ACM SIGLOG News, 3(3):47–65, 2016. 11
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.