Recognition: no theorem link
OpenSGA: Efficient 3D Scene Graph Alignment in the Open World
Pith reviewed 2026-05-12 04:55 UTC · model grok-4.3
The pith
Fusing vision-language, text and geometry lets a new framework align objects in partially overlapping 3D scene graphs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
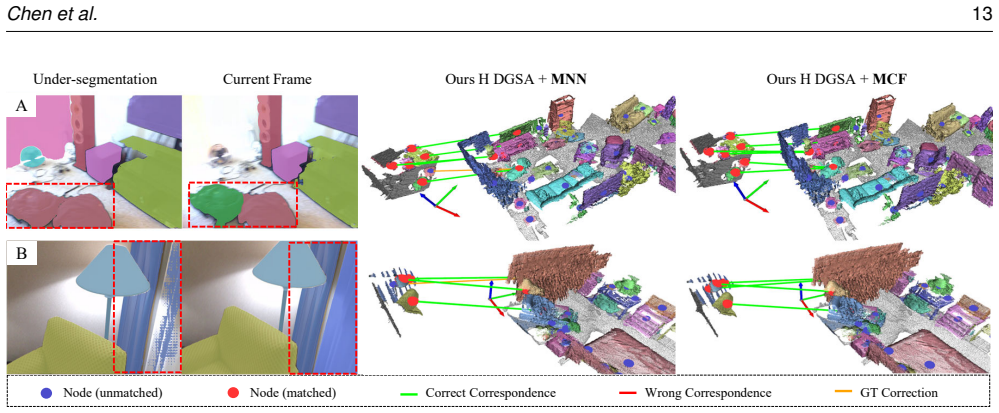
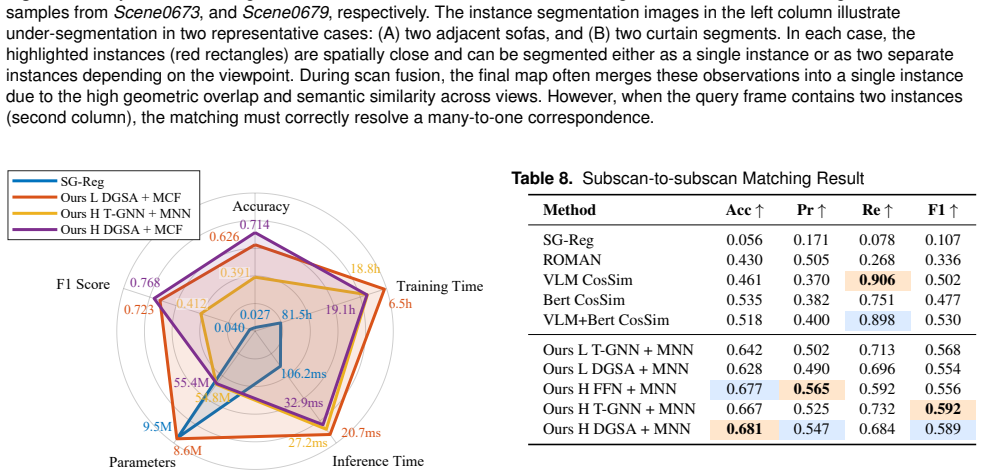
OpenSGA predicts object correspondences in 3D scene graphs by fusing vision-language, textual and geometric features together with spatial context. A distance-gated spatial attention encoder processes the combined features, a minimum-cost-flow allocator assigns matches, and a global scene embedding generator provides additional consistency. The framework handles both frame-to-scan and subscan-to-subscan alignment under large coordinate discrepancies and open-set categories, and it is trained and tested on the newly introduced ScanNet-SG dataset of over 700k samples.
What carries the argument
Multi-modal feature fusion inside a distance-gated spatial attention encoder followed by minimum-cost-flow allocation to establish correspondences.
If this is right
- Robots obtain reliable object-level relocalization when they revisit a location.
- Multiple agents can fuse their individual maps into a consistent global map at the object level.
- Scene understanding and mapping become feasible without limiting the robot to a fixed, closed set of object labels.
- Alignment remains possible even when the coordinate systems of the two observations are poorly aligned.
- Large-scale training and systematic evaluation become practical thanks to the released ScanNet-SG dataset.
Where Pith is reading between the lines
- The same fused representation could support incremental lifelong mapping by reusing prior alignments when a robot returns to an area.
- Adding temporal or motion features to the fusion step might extend the method to dynamic scenes with moving objects.
- The automated annotation pipeline that combines ScanNet labels with GPT-4o tagging could be reused to create open-world benchmarks for other 3D perception tasks.
Load-bearing premise
The combination of vision-language, textual and geometric features plus spatial context is enough to find accurate object matches despite large coordinate differences and open-set categories.
What would settle it
A controlled test set of scene pairs with substantially larger coordinate offsets or many unseen object categories where alignment precision falls below strong geometric baselines would falsify the claim.
Figures










read the original abstract
Scene graph alignment establishes object correspondences between two 3D scene graphs constructed from partially overlapping observations. This enables efficient scene understanding and object-level relocalization when a robot revisits a place, as well as global map fusion across multiple agents. Such capabilities are essential for robots that require long-term memory for long-horizon tasks involving interactions with the environment. Existing approaches mainly focus on subscan-to-subscan (S2S) alignment and depend heavily on geometric point-cloud features, leaving frame-to-scan (F2S) alignment and open-set vision-language features underexplored. In addition, existing datasets for scene graph alignment remain small-scale with limited object diversity, constraining systematic training and evaluation. We present a unified and efficient scene graph alignment framework that predicts object correspondences by fusing vision-language, textual, and geometric features with spatial context. The framework comprises modules such as a distance-gated spatial attention encoder, a minimum-cost-flow-based allocator, and a global scene embedding generator to achieve accurate alignment even under large coordinate discrepancies. We further introduce ScanNet-SG, a large-scale dataset generated via an automated annotation pipeline with over 700k samples, covering 509 object categories from ScanNet labels and over 3k categories from GPT-4o-based tagging. Experiments show that our method achieves the best overall performance on both F2S and S2S tasks, substantially outperforming existing scene graph alignment methods. Our code and dataset are released at: https://autonomousrobots.nl/paper_websites/opensga.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents OpenSGA, a unified framework for 3D scene graph alignment that fuses vision-language, textual, and geometric features with spatial context via a distance-gated spatial attention encoder, a minimum-cost-flow-based allocator, and a global scene embedding generator. It targets both frame-to-scan (F2S) and subscan-to-subscan (S2S) tasks in open-world settings with large coordinate discrepancies. The authors introduce ScanNet-SG, a large-scale dataset of over 700k samples constructed via an automated pipeline that augments 509 ScanNet labels with GPT-4o tagging for more than 3k categories. Experiments claim that OpenSGA achieves the best overall performance on both tasks, substantially outperforming prior scene graph alignment methods. Code and dataset are released.
Significance. If the performance claims are supported by validated data, the work advances open-set 3D scene understanding for robotics by enabling F2S alignment and large-scale training on diverse categories. The explicit release of code and the ScanNet-SG dataset constitutes a clear strength for reproducibility and follow-on research.
major comments (2)
- [Dataset Construction] Dataset Construction section: the ScanNet-SG dataset is generated using GPT-4o tagging for >3k open-set categories to produce >700k samples and correspondence labels, yet no quantitative validation (precision/recall, human agreement, or error rates on object categories) is reported. Because mismatches would directly corrupt positive/negative pair labels and spatial-context features, this undermines isolation of whether reported F2S/S2S gains arise from the fused modules or from dataset artifacts.
- [Experiments] Experiments section: the headline claim of best overall F2S and S2S performance rests on comparisons against prior methods on ScanNet-SG, but the manuscript provides no ablation studies isolating the contribution of the distance-gated attention or feature-fusion components, no error bars, and no failure-case analysis under large coordinate discrepancies. These omissions make it impossible to verify robustness of the central empirical result.
minor comments (2)
- [Abstract] Abstract: reports superior performance without any quantitative metrics, table references, or result summaries; adding a compact results table would improve clarity.
- [Notation and Presentation] Ensure all acronyms (F2S, S2S, VL) are defined on first use and used consistently in figure captions and tables.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate planned revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Dataset Construction] Dataset Construction section: the ScanNet-SG dataset is generated using GPT-4o tagging for >3k open-set categories to produce >700k samples and correspondence labels, yet no quantitative validation (precision/recall, human agreement, or error rates on object categories) is reported. Because mismatches would directly corrupt positive/negative pair labels and spatial-context features, this undermines isolation of whether reported F2S/S2S gains arise from the fused modules or from dataset artifacts.
Authors: We agree that explicit quantitative validation of the GPT-4o tagging step is important to rule out label noise as a confounding factor. The current manuscript describes the automated pipeline but does not report precision/recall or human agreement metrics. In the revised version we will add a dedicated validation subsection that includes (i) precision/recall on a manually inspected random subset of 5,000 samples and (ii) inter-rater agreement statistics with two human annotators on the same subset. These additions will allow readers to assess label quality independently of the alignment modules. revision: yes
-
Referee: [Experiments] Experiments section: the headline claim of best overall F2S and S2S performance rests on comparisons against prior methods on ScanNet-SG, but the manuscript provides no ablation studies isolating the contribution of the distance-gated attention or feature-fusion components, no error bars, and no failure-case analysis under large coordinate discrepancies. These omissions make it impossible to verify robustness of the central empirical result.
Authors: We concur that the empirical section would benefit from component-wise ablations, statistical variability measures, and targeted failure analysis. The present manuscript reports only aggregate performance numbers. We will revise the Experiments section to include: (i) ablations that isolate the distance-gated spatial attention encoder and the vision-language/geometric feature fusion, (ii) mean and standard deviation results over five independent training runs with different random seeds, and (iii) a qualitative and quantitative failure-case study focused on pairs with large coordinate discrepancies. These changes will directly address concerns about robustness. revision: yes
Circularity Check
No significant circularity in derivation or claims
full rationale
The paper's central claims concern empirical performance of a scene-graph alignment framework on F2S/S2S tasks, supported by experiments on a newly introduced dataset. No equations, predictions, or first-principles derivations are presented that reduce by construction to fitted parameters, self-definitions, or self-citation chains. The method description (distance-gated attention, minimum-cost-flow allocator, feature fusion) is algorithmic and evaluated externally against prior methods; dataset construction details do not alter the non-circular status of the reported results under the specified patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Vision-language and geometric features extracted from partially overlapping 3D observations contain sufficient signal for object correspondence
Reference graph
Works this paper leans on
-
[1]
Grounded SAM: Assembling Open-World Models for Diverse Visual Tasks
Grounded sam: Assembling open-world models for diverse visual tasks , author =. arXiv preprint arXiv:2401.14159 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[2]
European conference on computer vision , pages=
Grounding dino: Marrying dino with grounded pre-training for open-set object detection , author =. European conference on computer vision , pages=. 2024 , organization=
work page 2024
-
[3]
Sentence-bert: Sentence embeddings using siamese bert-networks , author=. Proceedings of the 2019 Conference on Empirical Methods in Natural Language Processing and the 9th International Joint Conference on Natural Language Processing , pages=
work page 2019
-
[4]
Proceedings of the 23rd annual conference on Computer graphics and interactive techniques , pages=
OBBTree: A hierarchical structure for rapid interference detection , author=. Proceedings of the 23rd annual conference on Computer graphics and interactive techniques , pages=
- [5]
-
[6]
Sg-pgm: Partial graph matching network with semantic geometric fusion for 3d scene graph alignment and its downstream tasks , author=
-
[7]
Liu, Chuhao and Qiao, Zhijian and Shi, Jieqi and Wang, Ke and Liu, Peize and Shen, Shaojie , journal=tro, title=. 2025 , volume=
work page 2025
-
[8]
Sgaligner: 3d scene alignment with scene graphs , author=
-
[9]
Advances in neural information processing systems , volume=
Attention is all you need , author=. Advances in neural information processing systems , volume=
-
[10]
Deep residual learning for image recognition , author=
-
[11]
Layer normalization , author=. arXiv preprint arXiv:1607.06450 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[12]
Lightglue: Local feature matching at light speed , author=
-
[13]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Recognize anything: A strong image tagging model , author =. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[14]
Journal of the Operational Research Society , volume=
Network flows: theory, algorithms, and applications , author=. Journal of the Operational Research Society , volume=. 1994 , publisher=
work page 1994
-
[15]
Exploring network structure, dynamics, and function using NetworkX , author=. 2008 , institution=
work page 2008
-
[16]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Learning 3d semantic scene graphs from 3d indoor reconstructions , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[17]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Rio: 3d object instance re-localization in changing indoor environments , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[18]
Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
Scannet: Richly-annotated 3d reconstructions of indoor scenes , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
-
[19]
Communications of the ACM , volume=
Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography , author=. Communications of the ACM , volume=. 1981 , publisher=
work page 1981
-
[20]
Sensor fusion IV: control paradigms and data structures , volume=
Method for registration of 3-D shapes , author=. Sensor fusion IV: control paradigms and data structures , volume=. 1992 , organization=
work page 1992
-
[21]
OpenAI , month = oct, year =. doi:10.48550/arXiv.2410.21276 , language =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2410.21276
-
[22]
International Conference on Machine Learning , year=
Learning Transferable Visual Models from Natural Language Supervision , author =. International Conference on Machine Learning , year=
-
[23]
International Conference on Learning Representations , year=
Decoupled Weight Decay Regularization , author=. International Conference on Learning Representations , year=
-
[24]
Peterson, Mason B and Jia, Yi Xuan and Tian, Yulun and Thomas, Annika and How, Jonathan P , booktitle=
-
[25]
Fast segment anything , author=. arXiv preprint arXiv:2306.12156 , year=
-
[26]
Optuna: A Next-generation Hyperparameter Optimization Framework , author=. Proceedings of the 25th
-
[27]
A density-based algorithm for discovering clusters in large spatial databases with noise , author=. kdd , volume=
-
[28]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , month=
Geometric Transformer for Fast and Robust Point Cloud Registration , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , month=. 2022 , pages=
work page 2022
-
[29]
3d scene graph: A structure for unified semantics, 3d space, and camera , author=
-
[30]
Robotics: Science and Systems (RSS) , year =
Nathan Hughes and Yun Chang and Luca Carlone , title =. Robotics: Science and Systems (RSS) , year =
-
[31]
The International Journal of Robotics Research , volume=
Foundations of spatial perception for robotics: Hierarchical representations and real-time systems , author=. The International Journal of Robotics Research , volume=. 2024 , publisher=
work page 2024
-
[32]
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Hydra-multi: Collaborative online construction of 3d scene graphs with multi-robot teams , author=. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2023 , organization=
work page 2023
-
[33]
Open3dsg: Open-vocabulary 3d scene graphs from point clouds with queryable objects and open-set relationships , author=
-
[34]
Clip-driven open-vocabulary 3d scene graph generation via cross-modality contrastive learning , author=
-
[35]
Clio: Real-time task-driven open-set 3d scene graphs , author=. 2024 , publisher=
work page 2024
-
[36]
Open-vocabulary functional 3d scene graphs for real-world indoor spaces , author=
-
[37]
Incremental 3d semantic scene graph prediction from rgb sequences , author=
-
[38]
Indoor and outdoor 3d scene graph generation via language-enabled spatial ontologies , author=. 2024 , publisher=
work page 2024
-
[39]
arXiv preprint arXiv:2411.02938 , year=
Multi-modal 3D scene graph updater for shared and dynamic environments , author=. arXiv preprint arXiv:2411.02938 , year=
-
[40]
Proceedings of the IEEE/CVF international conference on computer vision , pages=
Segment anything , author=. Proceedings of the IEEE/CVF international conference on computer vision , pages=
-
[41]
IEEE Robotics and Automation Letters , year=
MR-COGraphs: Communication-efficient multi-robot open-vocabulary mapping system via 3D scene graphs , author=. IEEE Robotics and Automation Letters , year=
-
[42]
Conceptgraphs: Open-vocabulary 3d scene graphs for perception and planning , author =. 2024 , organization=
work page 2024
-
[43]
Language-grounded dynamic scene graphs for interactive object search with mobile manipulation , author=. 2024 , publisher=
work page 2024
-
[44]
Conference on Robot Learning (CoRL) , year=
SayPlan: Grounding Large Language Models using 3D Scene Graphs for Scalable Robot Task Planning , author=. Conference on Robot Learning (CoRL) , year=
-
[45]
Delta: Decomposed efficient long-term robot task planning using large language models , author=. 2025 , organization=
work page 2025
-
[46]
Optimal scene graph planning with large language model guidance , author=. 2024 , organization=
work page 2024
-
[47]
Open-Architecture End-to-End System for Real-World Autonomous Robot Navigation
Orionnav: Online planning for robot autonomy with context-aware llm and open-vocabulary semantic scene graphs , author=. arXiv preprint arXiv:2410.06239 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[48]
Openobject-nav: Open-vocabulary object-oriented navigation based on dynamic carrier-relationship scene graph , author=. 2025 , organization=
work page 2025
-
[49]
Synergai: Perception alignment for human-robot collaboration , author=. 2025 , organization=
work page 2025
-
[50]
Commonsense scene graph-based target localization for object search , author=. 2024 , organization=
work page 2024
-
[51]
S-Graphs+: Real-Time Localization and Mapping Leveraging Hierarchical Representations , author=. 2023 , publisher=
work page 2023
-
[52]
REGRACE: A Robust and Efficient Graph-based Re-localization Algorithm using Consistency Evaluation , author=. 2025 , organization=
work page 2025
-
[53]
IEEE Robotics and Automation Letters , volume=
Long-term human trajectory prediction using 3d dynamic scene graphs , author=. IEEE Robotics and Automation Letters , volume=. 2024 , publisher=
work page 2024
-
[54]
Controllable 3D outdoor scene generation via scene graphs , author=
-
[55]
arXiv preprint arXiv:2509.20401 , year=
SGAligner++: Cross-Modal Language-Aided 3D Scene Graph Alignment , author=. arXiv preprint arXiv:2509.20401 , year=
-
[56]
Advances in Neural Information Processing Systems , volume=
Commonscenes: Generating commonsense 3d indoor scenes with scene graph diffusion , author=. Advances in Neural Information Processing Systems , volume=
-
[57]
arXiv preprint arXiv:2411.03540 , year=
Vla-3d: A dataset for 3d semantic scene understanding and navigation , author=. arXiv preprint arXiv:2411.03540 , year=
-
[58]
arXiv preprint arXiv:2408.04034 , year=
Task-oriented Sequential Grounding and Navigation in 3D Scenes , author=. arXiv preprint arXiv:2408.04034 , year=
-
[59]
European Conference on Computer Vision (ECCV) , year=
SceneGraphLoc: Cross-Modal Coarse Visual Localization on 3D Scene Graphs , author=. European Conference on Computer Vision (ECCV) , year=
-
[60]
arXiv preprint arXiv:2602.20972 , year=
Are Multimodal Large Language Models Good Annotators for Image Tagging? , author=. arXiv preprint arXiv:2602.20972 , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.