Recognition: 2 theorem links
· Lean TheoremEffect of Graph Gluing on Consensus in Networked Multi-Agent Systems
Pith reviewed 2026-05-12 03:17 UTC · model grok-4.3
The pith
Graph gluing raises the Fiedler eigenvalue of the combined Laplacian and accelerates consensus convergence in multi-agent networks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Bridge gluing and interface gluing each increase the algebraic connectivity of the resulting graph in a way that depends on the count and arrangement of the inter-subsystem edges; the new algebraic connectivity then sets the convergence rate of the standard linear consensus dynamics on the full network.
What carries the argument
The Fiedler eigenvalue of the graph Laplacian, which is raised by the addition of gluing edges and directly bounds the exponential decay rate of the consensus error.
If this is right
- Adding more gluing links between subsystems raises algebraic connectivity and shortens consensus settling time.
- Bridge gluing and interface gluing produce measurably different eigenvalue gains even when they use the same number of links.
- Designers can select the gluing pattern to achieve a target convergence speed using only spectral properties of the glued graph.
- The same spectral relation lets engineers predict combined-system performance before the subsystems are physically joined.
Where Pith is reading between the lines
- The gluing analysis could be reused to decide where to add links when networks grow incrementally over time.
- If similar eigenvalue bounds hold for directed graphs, the same gluing rules would apply to one-way communication networks.
- The approach may extend to other collective tasks such as formation control once their convergence is also tied to algebraic connectivity.
Load-bearing premise
That the consensus protocol stays linear and that performance changes come only from the updated Fiedler eigenvalue with no further effects from agent internals or nonlinearities.
What would settle it
A concrete simulation or calculation in which the measured consensus convergence time after a chosen gluing operation fails to match the rate predicted from the new Fiedler eigenvalue.
Figures






read the original abstract
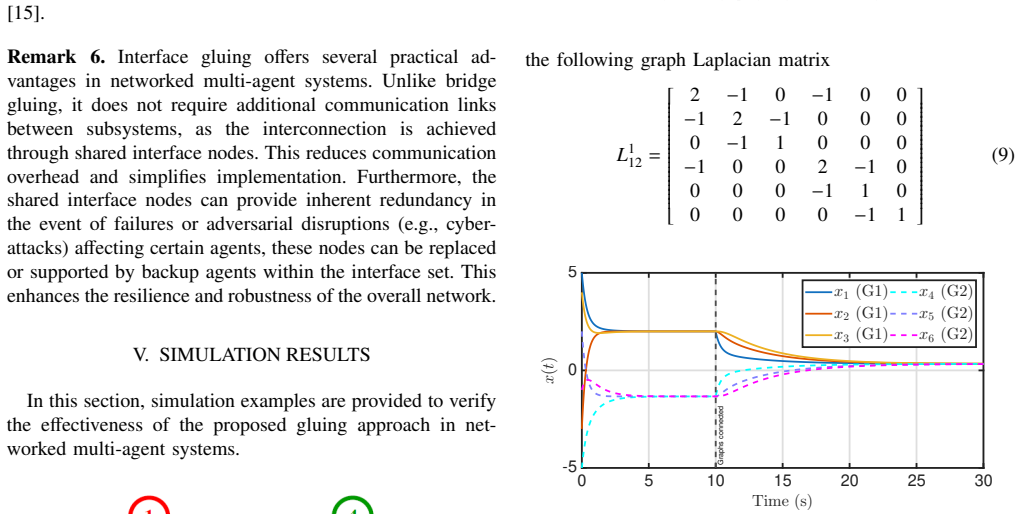
In this paper, the effects of graph gluing operations in networks of multi-agent systems and their impact on system performance are investigated. In many practical applications, multiple multi-agent subsystems must be interconnected through communication links to accomplish complex tasks, resulting in a larger communication network. Such interconnections modify the underlying graph topology and consequently affect the consensus behavior and convergence rate of the network. In particular, this paper examines both bridge gluing and interface gluing and analyzes how the number and structure of communication links between subsystems influence the Fiedler eigenvalue of the resulting graph. Since the Fiedler eigenvalue is directly related to the convergence rate of consensus dynamics, the proposed analysis establishes a clear relationship between interconnection strategies, algebraic connectivity, and system performance. The results provide theoretical insight into how different gluing mechanisms alter the spectral properties of the graph Laplacian and, in turn, the convergence characteristics of the networked multi-agent system. Simulation studies are presented to illustrate the theoretical findings and to validate the effectiveness of the proposed framework.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that bridge gluing and interface gluing operations on multi-agent subsystems modify the Fiedler eigenvalue (algebraic connectivity) of the composite graph Laplacian in a manner determined by the number and structure of inter-subsystem links, thereby controlling the convergence rate of consensus dynamics, with the relationship supported by theoretical analysis and simulation studies.
Significance. If the explicit relationship between gluing parameters and the change in λ₂ is derived rigorously, the work would offer practical guidance on interconnection design for improving consensus performance in distributed multi-agent networks.
major comments (2)
- The abstract asserts that the Fiedler eigenvalue 'is directly related to the convergence rate of consensus dynamics' and that the analysis 'establishes a clear relationship' between gluing and performance. This equivalence is load-bearing but holds only under the first-order linear protocol ẋ = −Lx; the manuscript must explicitly state the system model and confirm that no additional eigenvalues from subsystem dynamics dominate the decay rate.
- In the sections analyzing bridge gluing and interface gluing, the influence of link number and structure on λ₂ is described qualitatively but without explicit bounds, closed-form expressions, or proofs quantifying the change in the Fiedler eigenvalue as a function of the gluing parameters; this omission prevents verification of the claimed quantitative relationship.
minor comments (1)
- The simulation section would benefit from tabulated convergence rates (e.g., time to reach a fixed error threshold) for each gluing configuration to allow direct comparison with the predicted λ₂ values.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our results. We address each major comment below and will revise the manuscript to improve rigor and clarity.
read point-by-point responses
-
Referee: The abstract asserts that the Fiedler eigenvalue 'is directly related to the convergence rate of consensus dynamics' and that the analysis 'establishes a clear relationship' between gluing and performance. This equivalence is load-bearing but holds only under the first-order linear protocol ẋ = −Lx; the manuscript must explicitly state the system model and confirm that no additional eigenvalues from subsystem dynamics dominate the decay rate.
Authors: We agree that the underlying system model must be stated explicitly. The manuscript considers the standard first-order consensus protocol ẋ = −L x on the composite graph, for which the convergence rate is governed by the Fiedler eigenvalue λ₂ of the Laplacian (assuming the graph is connected). We will revise the abstract and add a dedicated paragraph in the introduction to state this model clearly and confirm that no additional subsystem dynamics are present that could introduce faster or slower modes. revision: yes
-
Referee: In the sections analyzing bridge gluing and interface gluing, the influence of link number and structure on λ₂ is described qualitatively but without explicit bounds, closed-form expressions, or proofs quantifying the change in the Fiedler eigenvalue as a function of the gluing parameters; this omission prevents verification of the claimed quantitative relationship.
Authors: The current theoretical analysis relies on established spectral properties of graph Laplacians under gluing operations to demonstrate directional effects on λ₂. We acknowledge that explicit quantitative bounds or closed-form expressions would strengthen verifiability. In the revised manuscript we will derive and include such bounds (using, for example, eigenvalue interlacing theorems and perturbation results for Laplacians) together with the corresponding proofs, expressed as functions of the number and placement of inter-subsystem links. revision: yes
Circularity Check
No circularity; standard application of Laplacian spectral properties to consensus
full rationale
The paper derives relationships between gluing operations, the Fiedler eigenvalue of the composite Laplacian, and consensus convergence rates by invoking the well-known fact that for the linear protocol ẋ = −Lx the decay rate is governed by λ₂. This is an external mathematical fact from algebraic graph theory, not a quantity defined or fitted within the paper itself. No equations reduce by construction to the paper's own inputs, no parameters are fitted on a subset and then relabeled as predictions, and no load-bearing steps rely on self-citations whose validity is internal to the present work. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The Fiedler eigenvalue of the graph Laplacian governs the convergence rate of linear consensus dynamics
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearthe convergence rate is governed by the Fiedler eigenvalue λ₂(L), with the consensus time constant satisfying τ ∝ 1/λ₂(L)
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclearProposition 4.1: λ₂(G) ≤ k/|V(G₁)| + k/|V(G₂)| for bridge gluing
Reference graph
Works this paper leans on
-
[1]
Consensus and cooperation in networked multi-agent systems,
R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and cooperation in networked multi-agent systems,”Proceedings of the IEEE, vol. 95, pp. 215–233, Jan 2007
work page 2007
-
[2]
Information flow and cooperative control of vehicle formations,
J. Fax and R. Murray, “Information flow and cooperative control of vehicle formations,”IEEE Transactions on Automatic Control, vol. 49, no. 9, pp. 1465–1476, 2004. cited By 2455
work page 2004
-
[3]
Coordination of groups of mobile autonomous agents using nearest neighbor rules,
A. Jadbabaie, J. Lin, and A. S. Morse, “Coordination of groups of mobile autonomous agents using nearest neighbor rules,”IEEE Transactions on Automatic Control, vol. 48, pp. 988–1001, June 2003
work page 2003
-
[4]
A survey of cooperative multi-agent reinforcement learning for multi-task scenarios,
J. Chai, Z. Zhao, Y . Zhu, and D. Zhao, “A survey of cooperative multi-agent reinforcement learning for multi-task scenarios,”Artificial Intelligence Science and Engineering, vol. 1, no. 2, pp. 98–121, 2025
work page 2025
-
[5]
X. Cao, M. Li, Y . Tao, and P. Lu, “Hma-sar: Multi-agent search and rescue for unknown located dynamic targets in completely unknown environments,”IEEE Robotics and Automation Letters, vol. 9, no. 6, pp. 5567–5574, 2024
work page 2024
-
[6]
Multi-uav search and rescue in wilderness using smart agent-based probability models,
Z. Ge, J. Jiang, and M. Coombes, “Multi-uav search and rescue in wilderness using smart agent-based probability models,”IEEE Transactions on Aerospace and Electronic Systems, vol. 62, pp. 1649– 1662, 2026
work page 2026
-
[7]
Lectures on quantization of gauge systems,
N. Reshetikhin, “Lectures on quantization of gauge systems,” inNew Paths Towards Quantum Gravity, pp. 125–190, Springer, 2010
work page 2010
-
[8]
Two-dimensional perturbative scalar qft and atiyah-segal gluing,
S. Kandel, P. Mnev, and K. Wernli, “Two-dimensional perturbative scalar qft and atiyah-segal gluing,”Advances In Theoretical and Mathematical Physics, vol. 25, no. 7, pp. 1847–1952, 2021
work page 1952
-
[9]
On spectral clustering: Analysis and an algorithm,
A. Ng, M. Jordan, and Y . Weiss, “On spectral clustering: Analysis and an algorithm,”Advances in neural information processing systems, vol. 14, 2001
work page 2001
-
[10]
Gluing of graph laplacians and their spectra,
I. Contreras, M. Toriyama, and C. Yu, “Gluing of graph laplacians and their spectra,”Linear and Multilinear Algebra, vol. 68, no. 4, pp. 710–749, 2020
work page 2020
-
[11]
Combinatorial qft on graphs: first quantization formalism,
I. Contreras, S. Kandel, P. Mnev, and K. Wernli, “Combinatorial qft on graphs: first quantization formalism,”Annales de l’Institut Henri Poincar´ e D, 2024
work page 2024
-
[12]
S. Brar, S.-C. Chen, S. Ghosh Hajra, and S. Kandel, “Gluing formula for the pseudo-determinant of the graph laplacian and its applications to spanning trees,” 2025. Preprint
work page 2025
- [13]
-
[14]
Algebraic connectivity of graphs,
M. Fiedler, “Algebraic connectivity of graphs,”Czechoslovak mathe- matical journal, vol. 23, no. 2, pp. 298–305, 1973
work page 1973
-
[15]
C. W. Wu,Synchronization in complex networks of nonlinear dynam- ical systems. World scientific, 2007
work page 2007
-
[16]
Sturm–liouville estimates for the spectrum and cheeger constant,
B. Benson, “Sturm–liouville estimates for the spectrum and cheeger constant,”International Mathematics Research Notices, vol. 2015, pp. 7510–7551, 10 2014
work page 2015
-
[17]
On the eigenvalues of weighted directed graphs,
M. Balti, “On the eigenvalues of weighted directed graphs,”Complex analysis and operator theory, vol. 11, no. 6, pp. 1387–1406, 2017
work page 2017
-
[18]
An internal model principle for the attacker in distributed control systems,
R. Moghadam and H. Modares, “An internal model principle for the attacker in distributed control systems,” in2017 IEEE 56th Annual Conference on Decision and Control (CDC), pp. 6604–6609, Dec 2017
work page 2017
-
[19]
Physical safety and cyber security analysis of multi-agent systems: A survey of recent advances,
D. Zhang, G. Feng, Y . Shi, and D. Srinivasan, “Physical safety and cyber security analysis of multi-agent systems: A survey of recent advances,”IEEE/CAA Journal of Automatica Sinica, vol. 8, no. 2, pp. 319–333, 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.