Recognition: 2 theorem links
· Lean TheoremDistributed Pose Graph Optimization via Continuous Riemannian Dynamics
Pith reviewed 2026-05-13 01:55 UTC · model grok-4.3
The pith
By modeling pose variables as massive particles subject to damping, equilibria of the Riemannian dynamics coincide with critical points of the pose graph optimization problem.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
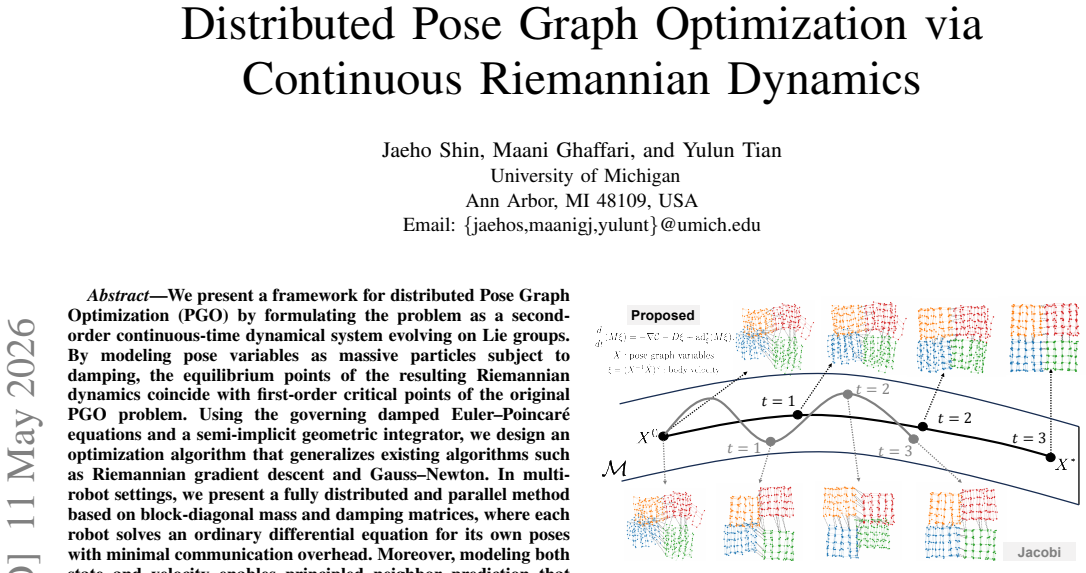
The central claim is that the equilibrium points of the Riemannian dynamics obtained by modeling pose variables as massive particles subject to damping coincide with first-order critical points of the original PGO problem. The governing damped Euler-Poincaré equations together with a semi-implicit geometric integrator produce a discrete algorithm that generalizes existing first- and second-order methods; when mass and damping matrices are block-diagonal the same integrator yields a fully distributed scheme in which each robot solves an ordinary differential equation for its own variables with low communication cost and with neighbor prediction to tolerate delays.
What carries the argument
Damped Euler-Poincaré equations on Lie groups that drive the modeled particles to rest precisely at the critical points of the PGO objective.
If this is right
- Riemannian gradient descent and Gauss-Newton arise as special cases by appropriate choice of mass and damping.
- Each robot can integrate its own ordinary differential equation independently once block-diagonal mass and damping matrices are used.
- Velocity variables enable explicit prediction of neighboring poses, improving convergence when communication is delayed or asynchronous.
- Convergence to first-order critical points is guaranteed whenever the chosen integrator satisfies the energy-dissipation condition.
Where Pith is reading between the lines
- The particle-dynamics view may allow natural addition of extra forces or constraints that represent physical limits in robotic mapping.
- The velocity estimates produced during integration could serve as a built-in measure of local uncertainty around the final poses.
- The same continuous formulation might be combined with discrete steps in hybrid solvers that adapt to problem scale or noise level.
Load-bearing premise
The semi-implicit geometric integrator must dissipate energy so that the discrete updates still converge to critical points of the PGO objective.
What would settle it
A numerical run on a standard PGO benchmark in which the algorithm stops at a configuration whose gradient norm in the original cost function is clearly nonzero.
Figures



read the original abstract
We present a framework for distributed Pose Graph Optimization (PGO) by formulating the problem as a second-order continuous-time dynamical system evolving on Lie groups. By modeling pose variables as massive particles subject to damping, the equilibrium points of the resulting Riemannian dynamics coincide with first-order critical points of the original PGO problem. Using the governing damped Euler--Poincar\'e equations and a semi-implicit geometric integrator, we design an optimization algorithm that generalizes existing algorithms such as Riemannian gradient descent and Gauss--Newton. In multi-robot settings, we present a fully distributed and parallel method based on block-diagonal mass and damping matrices, where each robot solves an ordinary differential equation for its own poses with minimal communication overhead. Moreover, modeling both state and velocity enables principled neighbor prediction that significantly improves convergence under delayed communication. Theoretically, we present an analysis and establish sufficient condition that ensures energy dissipation under the employed geometric discretization scheme. Experiments on benchmark PGO datasets demonstrate that the proposed solver achieves superior performance compared to state-of-the-art distributed baselines in both synchronous and asynchronous regimes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes formulating distributed pose graph optimization (PGO) as a second-order continuous-time Riemannian dynamical system on Lie groups, modeling pose variables as massive particles subject to damping. Equilibria of the resulting dynamics coincide with first-order critical points of the PGO objective by construction. A semi-implicit geometric integrator discretizes the damped Euler-Poincaré equations, generalizing Riemannian gradient descent and Gauss-Newton; the distributed version uses block-diagonal mass/damping matrices with neighbor prediction for asynchronous communication. A sufficient condition is stated to guarantee energy dissipation under the discretization, and experiments on benchmark datasets are claimed to show superior performance over distributed baselines in synchronous and asynchronous regimes.
Significance. If the sufficient condition for discrete energy dissipation is rigorously established and holds under block-diagonal approximations and delayed inexact coupling, the approach could offer a principled way to incorporate inertia and damping into distributed PGO solvers, potentially improving convergence rates and robustness to communication delays in multi-robot SLAM. The continuous-time modeling naturally supports neighbor prediction, which is a conceptual strength if the discrete guarantees are confirmed.
major comments (3)
- [Theoretical analysis] Theoretical analysis section: The sufficient condition for energy dissipation of the semi-implicit geometric integrator is stated but neither derived nor proved; no verification is provided that it holds for the chosen mass/damping matrices on benchmark graphs, especially under the block-diagonal structure and delayed neighbor predictions required for the distributed asynchronous case. This condition is load-bearing for the central convergence claim.
- [Distributed algorithm] Distributed algorithm and discretization sections: The energy-dissipation analysis does not address survival of the sufficient condition when mass and damping matrices are block-diagonal, coupling forces become inexact due to delays, and neighbor prediction is employed; without this, the guarantee that the discrete algorithm converges to PGO critical points does not extend to the multi-robot asynchronous regime.
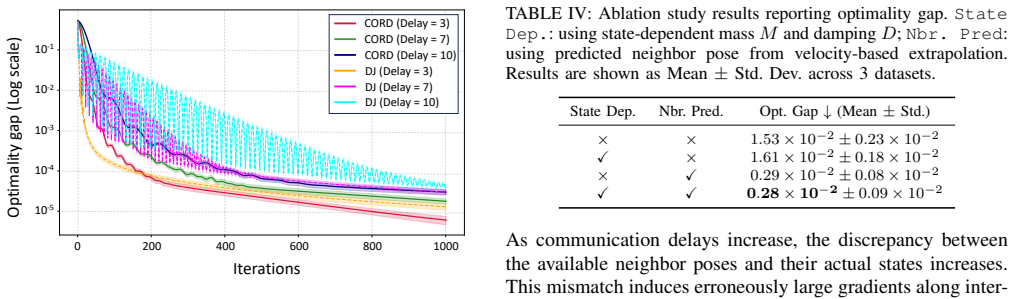
- [Experiments] Experiments section: The abstract asserts superior performance on benchmark PGO datasets relative to state-of-the-art distributed baselines, yet the manuscript supplies no quantitative metrics, error bars, iteration counts, final costs, or ablation studies on the effect of the sufficient-condition parameters, preventing assessment of the practical claims.
minor comments (2)
- [Modeling section] Clarify the precise definition of the Riemannian gradient and the mapping from the PGO cost to the forcing term in the Euler-Poincaré equations to make the first-principles construction more transparent.
- [Experiments] Add explicit statements of the mass and damping matrix choices used in the experiments and confirm they satisfy the sufficient condition for the reported step sizes.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major point below and will revise the manuscript to strengthen the theoretical foundations, extend the distributed analysis, and improve the experimental reporting.
read point-by-point responses
-
Referee: [Theoretical analysis] Theoretical analysis section: The sufficient condition for energy dissipation of the semi-implicit geometric integrator is stated but neither derived nor proved; no verification is provided that it holds for the chosen mass/damping matrices on benchmark graphs, especially under the block-diagonal structure and delayed neighbor predictions required for the distributed asynchronous case. This condition is load-bearing for the central convergence claim.
Authors: We agree that the derivation of the sufficient condition for energy dissipation should be fully presented. The current manuscript states the condition but condenses the proof. In the revised version, we will expand the theoretical analysis section with a complete step-by-step derivation of the energy dissipation property for the semi-implicit geometric integrator. We will also add numerical verification confirming that the condition holds for the chosen block-diagonal mass and damping matrices on the benchmark graphs, and we will discuss the effect of delayed neighbor predictions on the dissipation property. revision: yes
-
Referee: [Distributed algorithm] Distributed algorithm and discretization sections: The energy-dissipation analysis does not address survival of the sufficient condition when mass and damping matrices are block-diagonal, coupling forces become inexact due to delays, and neighbor prediction is employed; without this, the guarantee that the discrete algorithm converges to PGO critical points does not extend to the multi-robot asynchronous regime.
Authors: We acknowledge that the energy-dissipation analysis in the manuscript is developed primarily for the exact synchronous case and does not explicitly treat the block-diagonal approximation, inexact delayed couplings, or neighbor prediction. In the revision, we will add a dedicated subsection extending the analysis to these distributed settings, deriving conditions under which the sufficient condition remains valid or providing relaxed bounds that account for bounded communication delays. Where a complete guarantee cannot be established without further assumptions, we will clearly delineate the limitations and support the claims with the existing empirical results from the asynchronous experiments. revision: partial
-
Referee: [Experiments] Experiments section: The abstract asserts superior performance on benchmark PGO datasets relative to state-of-the-art distributed baselines, yet the manuscript supplies no quantitative metrics, error bars, iteration counts, final costs, or ablation studies on the effect of the sufficient-condition parameters, preventing assessment of the practical claims.
Authors: We agree that additional quantitative detail is required for a thorough assessment. Although the manuscript reports comparative performance, we will revise the experiments section to include explicit tables with final objective values, iteration counts to convergence, wall-clock times, and error bars computed over multiple runs with varied initializations. We will also add ablation studies examining the sensitivity of performance to the mass and damping parameters tied to the sufficient condition. revision: yes
Circularity Check
The claimed coincidence between equilibria of the damped Riemannian dynamics and PGO critical points holds by construction of the modeling choice.
specific steps
-
self definitional
[Abstract]
"By modeling pose variables as massive particles subject to damping, the equilibrium points of the resulting Riemannian dynamics coincide with first-order critical points of the original PGO problem."
The dynamics are explicitly constructed with a damping term that vanishes at zero velocity, leaving the equations to reduce exactly to the Riemannian gradient equaling zero. The stated coincidence is therefore true by definition of the chosen second-order system rather than a non-trivial consequence of the PGO objective.
full rationale
The paper's central first-principles result is obtained directly from the chosen formulation rather than derived independently. The discrete convergence analysis relies on a stated sufficient condition for energy dissipation whose verification details for the distributed asynchronous setting are not exhibited as reducing to prior inputs. No fitted parameters, self-citations, or renaming of known results appear in the provided text. This produces partial circularity confined to the continuous-time modeling step.
Axiom & Free-Parameter Ledger
free parameters (1)
- damping and mass matrices
axioms (2)
- domain assumption Equilibrium points of the damped Riemannian dynamics coincide with first-order critical points of the PGO cost function.
- ad hoc to paper A sufficient condition exists that guarantees energy dissipation for the chosen semi-implicit geometric integrator.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearBy modeling pose variables as massive particles subject to damping, the equilibrium points of the resulting Riemannian dynamics coincide with first-order critical points of the original PGO problem... establish sufficient condition that ensures energy dissipation under the employed geometric discretization scheme.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearthe total kinetic energy is defined as T:= ½ ξ⊤M ξ... damped Euler-Poincaré Equation... ΔE_k ≤ ... damping term dominates
Reference graph
Works this paper leans on
-
[1]
Shin, Sungho , month = may, year =. Graph-. 2023. doi:10.23919/ACC55779.2023.10155947 , language =
-
[2]
Shin, Sungho and Anitescu, Mihai and Zavala, Victor , pages =. Overlapping. 2020 59th. doi:10.1109/CDC42340.2020.9304139 , abstract =
-
[3]
Na, Sen and Shin, Sungho and Anitescu, Mihai and Zavala, Victor , journal=. On the. 2022 , month=mar, volume=
work page 2022
-
[4]
Exponential Decay of Sensitivity in Graph-Structured Nonlinear Programs
Shin, Sungho and Anitescu, Mihai and Zavala, Victor , month = dec, year =. Exponential. doi:10.48550/arXiv.2101.03067 , abstract =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2101.03067
-
[5]
IEEE Trans.\ on Control of Network Systems , author =
Decentralized. IEEE Trans.\ on Control of Network Systems , author =. 2020 , keywords =. doi:10.1109/TCNS.2020.2967805 , abstract =
- [6]
-
[7]
D. McGann and M. Kaess , fullauthor =. Proc. Robotics: Science and Systems (RSS) , address =
-
[11]
and Dellaert, Frank , month = sep, year =
Choudhary, Siddharth and Carlone, Luca and Christensen, Henrik I. and Dellaert, Frank , month = sep, year =. Exactly sparse memory efficient. 2015. doi:10.1109/IROS.2015.7353543 , abstract =
-
[12]
2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Cross-agent relocalization for decentralized collaborative SLAM , author=. 2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2023 , organization=
work page 2023
-
[13]
Distributed Pose Graph Optimization via Contractive Belief Sharing , year=
Liu, Xiangyu and Chli, Margarita , journal=. Distributed Pose Graph Optimization via Contractive Belief Sharing , year=
-
[14]
doi:10.48550/arXiv.2010.00156 , abstract =
Cristofalo, Eric and Montijano, Eduardo and Schwager, Mac , month = oct, year =. doi:10.48550/arXiv.2010.00156 , abstract =
-
[15]
Carlone, Luca and Tron, Roberto and Daniilidis, Kostas and Dellaert, Frank , pages =. Initialization techniques for. 2015. doi:10.1109/ICRA.2015.7139836 , abstract =
-
[16]
Fan, Taosha and Murphey, Todd , editor =. Generalized. Robotics. 2022 , doi =
work page 2022
-
[17]
Fan, Taosha and Ortiz, Joseph and Hsiao, Ming and Monge, Maurizio and Dong, Jing and Murphey, Todd and Mukadam, Mustafa , month = jul, year =. Decentralization and. Robotics:. doi:10.15607/RSS.2023.XIX.111 , abstract =
-
[18]
Konolige, K and Grisetti, G and Kümmerle, Rainer and Burgard, W and Limketkai, B and Vincent, R , pages =. Efficient. 2010. doi:10.1109/IROS.2010.5649043 , abstract =
-
[19]
A fast and accurate approximation for planar pose graph optimization , volume =. The Int. Journal of Robotics Research , author =. 2014 , pages =. doi:10.1177/0278364914523689 , abstract =
-
[20]
Wei, Ermin and Ozdaglar, Asuman , month = dec, year =. On the. 2013. doi:10.1109/GlobalSIP.2013.6736937 , language =
-
[21]
Wei, Ermin and Ozdaglar, Asuman , month = dec, year =. Distributed. 2012. doi:10.1109/CDC.2012.6425904 , language =
-
[23]
Halsted, Trevor and Shorinwa, Ola and Yu, Javier and Schwager, Mac , month = mar, year =. A. doi:10.48550/arXiv.2103.12840 , abstract =
-
[24]
Karypis, G. and Kumar, V. , month = nov, year =. Multilevel. doi:10.1109/SC.1998.10018 , abstract =
- [25]
-
[27]
Liu, Xu and Lei, Jiuzhou and Prabhu, Ankit and Tao, Yuezhan and Spasojevic, Igor and Chaudhari, Pratik and Atanasov, Nikolay and Kumar, Vijay , month = jul, year =. doi:10.48550/arXiv.2406.17249 , abstract =
-
[32]
Learning Feature Maps of the Koopman Operator: A Subspace Viewpoint,
Cristofalo, Eric and Montijano, Eduardo and Schwager, Mac , month = dec, year =. Consensus-based. 2019. doi:10.1109/CDC40024.2019.9029792 , abstract =
-
[34]
Journal of Intelligent & Robotic Systems , author =
Distributed. Journal of Intelligent & Robotic Systems , author =. 2025 , pages =. doi:10.1007/s10846-025-02257-w , abstract =
-
[35]
Chang, Yun and Tian, Yulun and How, Jonathan P. and Carlone, Luca , keywords =. Kimera-. 2021. doi:10.1109/ICRA48506.2021.9561090 , abstract =
-
[36]
IEEE Trans. on Robotics , author =. 2021 , keywords =. doi:10.1109/TRO.2021.3075644 , abstract =
-
[37]
IEEE Robotics and Automation Letters , author =. 2020 , keywords =. doi:10.1109/LRA.2020.2967681 , abstract =
-
[38]
Towards. Field Robotics , author =. 2022 , keywords =. doi:10.55417/fr.2022032 , abstract =
-
[39]
Streaming. IEEE Trans. on Signal Processing , author =. 2022 , keywords =. doi:10.1109/TSP.2022.3188208 , abstract =
-
[40]
Zhang, Yetong and Hsiao, Ming and Dong, Jing and Engel, Jakob and Dellaert, Frank , keywords =. 2021. doi:10.1109/IROS51168.2021.9636687 , abstract =
-
[41]
Decentralised cooperative localisation for heterogeneous teams of mobile robots , doi =
Bailey, Tim and Bryson, Mitch and Mu, Hua and Vial, John and McCalman, Lachlan and Durrant-Whyte, Hugh , keywords =. Decentralised cooperative localisation for heterogeneous teams of mobile robots , doi =. 2011
work page 2011
-
[42]
Andersson, Lars A. A. and Nygards, Jonas , pages =. C-. 2008. doi:10.1109/ROBOT.2008.4543634 , abstract =
-
[43]
Spectral. IEEE Trans. on Robotics , author =. 2024 , pages =. doi:10.1109/TRO.2023.3327635 , abstract =
-
[44]
IEEE Robotics and Automation Letters , author =. 2022 , keywords =. doi:10.1109/LRA.2022.3191204 , abstract =
-
[46]
Li, Fu and Yang, Shaowu and Yi, Xiaodong and Yang, Xuejun , year =. Collaborative. doi:10.1007/978-3-030-00916-8_45 , abstract =
-
[47]
Rotation. Int. Journal of Computer Vision , author =. 2013 , pages =. doi:10.1007/s11263-012-0601-0 , abstract =
-
[48]
Communication- and. IEEE Trans. on Robotics , author =. 2025 , pages =. doi:10.1109/TRO.2025.3567540 , abstract =
-
[49]
IEEE Transactions on Robotics , volume=
Kimera-multi: Robust, distributed, dense metric-semantic slam for multi-robot systems , author=. IEEE Transactions on Robotics , volume=. 2022 , publisher=
work page 2022
-
[50]
Barrau, Axel and Bonnabel, Silvere , journal=. The invariant extended. 2016 , publisher=
work page 2016
-
[51]
Frank Dellaert and. borglab/gtsam , month = May, year = 2022, publisher =. doi:10.5281/zenodo.5794541 , url =
-
[53]
IEEE Robotics and Automation Letters , volume=
Cartan-sync: Fast and global SE (d)-synchronization , author=. IEEE Robotics and Automation Letters , volume=. 2017 , publisher=
work page 2017
-
[54]
Journal of Machine Learning Research , year=
A differential equation for modeling Nesterov's accelerated gradient method: Theory and insights , author=. Journal of Machine Learning Research , year=
-
[55]
Soviet Mathematics Doklady , year=
A method for solving the convex programming problem with convergence rate O (1/k2) , author=. Soviet Mathematics Doklady , year=
-
[56]
proceedings of the National Academy of Sciences , volume=
A variational perspective on accelerated methods in optimization , author=. proceedings of the National Academy of Sciences , volume=. 2016 , publisher=
work page 2016
-
[57]
Journal of Machine Learning Research , pages=
A Lyapunov analysis of accelerated methods in optimization , author=. Journal of Machine Learning Research , pages=
-
[59]
Advances in Neural Information Processing Systems , volume=
Acceleration via symplectic discretization of high-resolution differential equations , author=. Advances in Neural Information Processing Systems , volume=
-
[60]
Optimization Methods and Software , volume=
Practical perspectives on symplectic accelerated optimization , author=. Optimization Methods and Software , volume=. 2023 , publisher=
work page 2023
-
[61]
Geometric numerical integration , volume=
Structure-preserving algorithms for ordinary differential equations , author=. Geometric numerical integration , volume=. 2006 , publisher=
work page 2006
-
[62]
2016 54th Annual Allerton Conference on Communication, Control, and Computing (Allerton) , year=
Projected gradient descent on Riemannian manifolds with applications to online power system optimization , author=. 2016 54th Annual Allerton Conference on Communication, Control, and Computing (Allerton) , year=
work page 2016
-
[63]
Journal of Nonlinear Science , volume=
Accelerated optimization on Riemannian manifolds via discrete constrained variational integrators , author=. Journal of Nonlinear Science , volume=. 2022 , publisher=
work page 2022
-
[64]
Proceedings of the IEEE conference on computer vision and pattern recognition , year=
Gravitational approach for point set registration , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , year=
-
[65]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Accelerated gravitational point set alignment with altered physical laws , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[66]
IEEE Transactions on Image Processing , volume=
GraphReg: Dynamical point cloud registration with geometry-aware graph signal processing , author=. IEEE Transactions on Image Processing , volume=. 2022 , publisher=
work page 2022
-
[67]
2018 International Conference on 3D Vision (3DV) , pages=
Nrga: Gravitational approach for non-rigid point set registration , author=. 2018 International Conference on 3D Vision (3DV) , pages=. 2018 , organization=
work page 2018
-
[68]
IEEE transactions on pattern analysis and machine intelligence , volume=
Efficient registration of high-resolution feature enhanced point clouds , author=. IEEE transactions on pattern analysis and machine intelligence , volume=. 2018 , publisher=
work page 2018
-
[69]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Dynamical pose estimation , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[70]
Bloch, Anthony and Krishnaprasad, PS and Marsden, Jerrold E and Ratiu, Tudor S , journal=. The Euler-Poincar. 1996 , publisher=
work page 1996
-
[71]
IMA Journal of Numerical Analysis , volume=
Global rates of convergence for nonconvex optimization on manifolds , author=. IMA Journal of Numerical Analysis , volume=. 2019 , publisher=
work page 2019
-
[72]
SIAM Journal on Optimization , volume=
Asynchronous stochastic coordinate descent: Parallelism and convergence properties , author=. SIAM Journal on Optimization , volume=. 2015 , publisher=
work page 2015
-
[73]
International conference on machine learning , pages=
Asynchronous decentralized parallel stochastic gradient descent , author=. International conference on machine learning , pages=. 2018 , organization=
work page 2018
-
[74]
Georgia Institute of Technology, Tech
Factor graphs and GTSAM: A hands-on introduction , author=. Georgia Institute of Technology, Tech. Rep , volume=
-
[75]
Mathematical programming , volume=
Benchmarking optimization software with performance profiles , author=. Mathematical programming , volume=. 2002 , publisher=
work page 2002
-
[76]
Global formulations of Lagrangian and Hamiltonian dynamics on manifolds , author=. 2018 , publisher=
work page 2018
-
[77]
The International Journal of Robotics Research , volume=
Convex geometric motion planning of multi-body systems on lie groups via variational integrators and sparse moment relaxation , author=. The International Journal of Robotics Research , volume=. 2025 , publisher=
work page 2025
-
[78]
IEEE Transactions on Robotics , year=
Port-Hamiltonian neural ODE networks on Lie groups for robot dynamics learning and control , author=. IEEE Transactions on Robotics , year=
-
[79]
Optimization algorithms on matrix manifolds , author=. 2008 , publisher=
work page 2008
-
[81]
Computer Methods in Applied Mechanics and Engineering , volume=
Lie group variational integrators for the full body problem , author=. Computer Methods in Applied Mechanics and Engineering , volume=. 2007 , publisher=
work page 2007
-
[82]
Kamak Ebadi, Lukas Bernreiter, Harel Biggie, Gavin Catt, Yun Chang, Arghya Chatterjee, Christopher E. Denniston, Simon-Pierre Deschênes, Kyle Harlow, Shehryar Khattak, Lucas Nogueira, Matteo Palieri, Pavel Petráček, Matěj Petrlík, Andrzej Reinke, Vít Krátký, Shibo Zhao, Ali-akbar Agha-mohammadi, Kostas Alexis, Christoffer Heckman, Kasra Khosoussi, Navinda...
-
[83]
Kimera-multi: Robust, distributed, dense metric-semantic slam for multi-robot systems
Yulun Tian, Yun Chang, Fernando Herrera Arias, Carlos Nieto-Granda, Jonathan P How, and Luca Carlone. Kimera-multi: Robust, distributed, dense metric-semantic slam for multi-robot systems. IEEE Transactions on Robotics, 38 0 (4), 2022
work page 2022
-
[84]
Xu Liu, Jiuzhou Lei, Ankit Prabhu, Yuezhan Tao, Igor Spasojevic, Pratik Chaudhari, Nikolay Atanasov, and Vijay Kumar. SlideSLAM : Sparse , Lightweight , Decentralized Metric - Semantic SLAM for Multi - Robot Navigation , July 2024. arXiv:2406.17249
-
[85]
Pierre-Yves Lajoie and Giovanni Beltrame. Swarm- SLAM : Sparse Decentralized Collaborative Simultaneous Localization and Mapping Framework for Multi - Robot Systems . IEEE Robotics and Automation Letters, 9(1): 0 475--482, January 2024. ISSN 2377-3766, 2377-3774. doi:10.1109/LRA.2023.3333742
-
[86]
COVINS : Visual - Inertial SLAM for Centralized Collaboration
Patrik Schmuck, Thomas Ziegler, Marco Karrer, Jonathan Perraudin, and Margarita Chli. COVINS : Visual - Inertial SLAM for Centralized Collaboration . In 2021 IEEE Int. Symposium on Mixed and Augmented Reality Adjunct , pages 171--176, October 2021. doi:10.1109/ISMAR-Adjunct54149.2021.00043
-
[87]
Yulun Tian, Kasra Khosoussi, David M. Rosen, and Jonathan P. How. Distributed Certifiably Correct Pose - Graph Optimization . IEEE Trans. on Robotics, 37(6): 0 2137--2156, December 2021. ISSN 1941-0468. doi:10.1109/TRO.2021.3072346
-
[88]
Asynchronous Distributed Smoothing and Mapping via On - Manifold Consensus ADMM
Daniel McGann, Kyle Lassak, and Michael Kaess. Asynchronous Distributed Smoothing and Mapping via On - Manifold Consensus ADMM . In IEEE Int. Conf. on Robotics and Automation, pages 4577--4583, 2024
work page 2024
-
[89]
Taosha Fan and Todd D. Murphey. Majorization Minimization Methods for Distributed Pose Graph Optimization . IEEE Trans.\ on Robotics, 40: 0 22--42, 2024. ISSN 1941-0468. doi:10.1109/TRO.2023.3324818
-
[90]
Riku Murai, Joseph Ortiz, Sajad Saeedi, Paul H. J. Kelly, and Andrew J. Davison. A Robot Web for Distributed Many - Device Localization . IEEE Trans. on Robotics, 40: 0 121--138, 2024. ISSN 1941-0468. doi:10.1109/TRO.2023.3324127
-
[91]
Yulun Tian, Alec Koppel, Amrit Singh Bedi, and Jonathan P. How. Asynchronous and Parallel Distributed Pose Graph Optimization . IEEE Robotics and Automation Letters, 5(4): 0 5819--5826, October 2020. ISSN 2377-3766. doi:10.1109/LRA.2020.3010216
-
[92]
The euler-poincar \'e equations and double bracket dissipation
Anthony Bloch, PS Krishnaprasad, Jerrold E Marsden, and Tudor S Ratiu. The euler-poincar \'e equations and double bracket dissipation. Communications in mathematical physics, 175 0 (1): 0 1--42, 1996
work page 1996
-
[93]
Port-hamiltonian neural ode networks on lie groups for robot dynamics learning and control
Thai Duong, Abdullah Altawaitan, Jason Stanley, and Nikolay Atanasov. Port-hamiltonian neural ode networks on lie groups for robot dynamics learning and control. IEEE Transactions on Robotics, 2024
work page 2024
-
[94]
Sangli Teng, Ashkan Jasour, Ram Vasudevan, and Maani Ghaffari. Convex geometric motion planning of multi-body systems on lie groups via variational integrators and sparse moment relaxation. The International Journal of Robotics Research, 44 0 (10-11): 0 1784--1813, 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.