Recognition: 2 theorem links
· Lean TheoremPhysics-Informed Teacher-Student Ensemble Learning for Traffic State Estimation with a Varying Speed Limit Scenario
Pith reviewed 2026-05-13 01:39 UTC · model grok-4.3
The pith
A teacher-student ensemble of physics-informed neural networks solves traffic state estimation under varying speed limits by using a classifier to select the right model for each condition.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
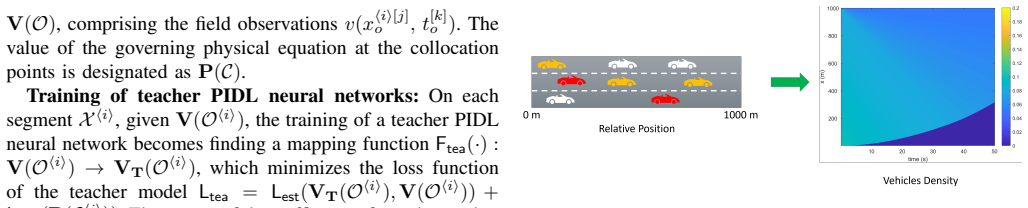
The integrated framework provides a natural solution for capturing the heterogeneity of VSL and accurately addressing the TSE problem. The physics of flow conservation law is encoded locally in the teacher models by PIDL, and the student model uses a multi-layer perceptron classifier to identify traffic characteristics and select the ensemble member of PIDL neural networks for TSE.
What carries the argument
Teacher-student ensemble where PIDL encodes flow conservation locally in each teacher model and an MLP classifier in the student selects the appropriate teacher based on identified traffic characteristics.
If this is right
- The ensemble captures heterogeneity of traffic characteristics induced by varying speed limits.
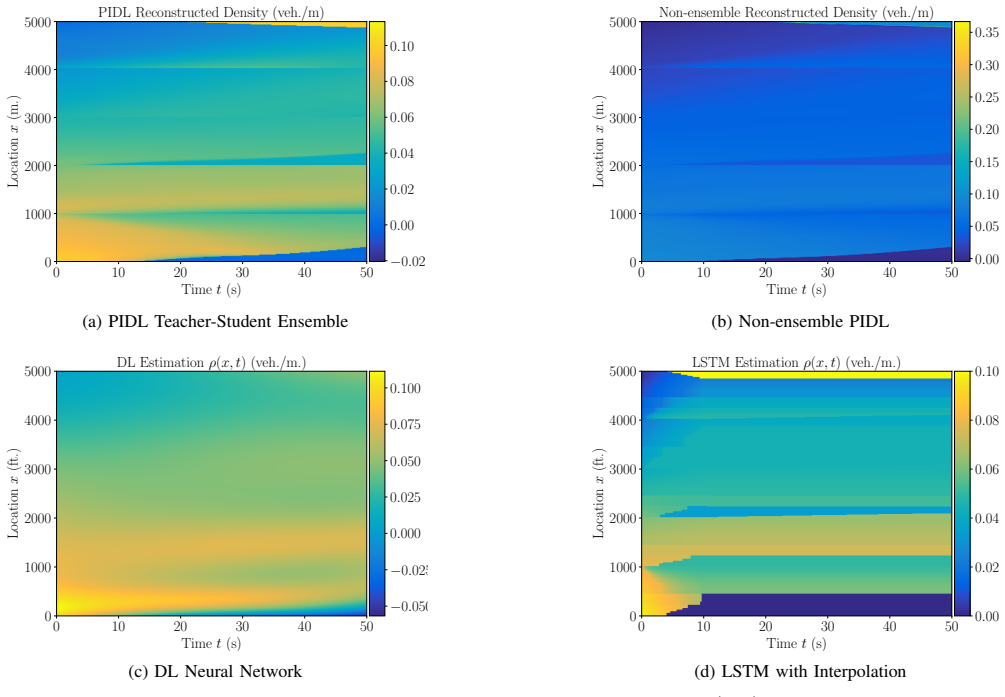
- It achieves superior traffic state estimation performance compared to popular baseline methods as measured by relative L2 error.
- Local encoding of physics laws in the teacher models enables adaptation to changing conditions that defeat single PIDL networks.
- Case study validation on freeway scenarios confirms the practical effectiveness of the selection mechanism.
Where Pith is reading between the lines
- The classifier-based selection could be extended to other dynamic controls such as ramp metering or dynamic lanes.
- Real-time use would require checking whether running multiple teachers in parallel remains computationally feasible on embedded hardware.
- Training the classifier on data with added noise or missing sensors would test robustness for field deployment.
Load-bearing premise
The multi-layer perceptron classifier in the student model can accurately and reliably identify traffic characteristics to select the appropriate PIDL teacher model under varying conditions.
What would settle it
A test on new VSL freeway data where the MLP classifier selects the wrong teacher frequently enough that the ensemble's relative L2 error equals or exceeds that of a single PIDL model would falsify the claim of superior performance.
Figures



read the original abstract
Physics-informed deep learning (PIDL) neural networks have shown their capability as a useful instrument for transportation practitioners in utilizing the underlying relationship between the state variables for traffic state estimation (TSE). Another efficient traffic management approach is implementing varying speed limits (VSLs) on transportation corridors to control traffic and mitigate congestion. However, the existing training architecture of PIDL in the literature cannot accommodate the changing traffic characteristics on a freeway with VSL. To tackle this challenge, we propose a novel framework integrating teacher-student ensemble training with PIDL neural networks for TSE under VSL scenarios. The physics of flow conservation law is encoded locally in the teacher models by PIDL, and the student model uses a multi-layer perceptron classifier (MLP) to identify traffic characteristics and selects the ensemble member of PIDL neural networks for TSE. This integrated framework provides a natural solution for capturing the heterogeneity of VSL and accurately addressing the TSE problem. The case study results validate the proposed ensemble approach, demonstrating its superior performance in TSE compared to other popular baseline methods, as indicated by relative L2 error.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a teacher-student ensemble framework for traffic state estimation (TSE) under varying speed limit (VSL) scenarios. Multiple PIDL teacher models locally encode the flow conservation law to capture different traffic regimes induced by VSL heterogeneity. An MLP-based student classifier identifies the regime from state features and routes the input to the matching teacher for TSE. A case study reports that the ensemble achieves lower relative L2 error than popular baseline methods.
Significance. If the central claim holds after proper validation, the framework provides a practical way to adapt physics-informed models to piecewise traffic dynamics created by VSL, which is a common real-world control strategy. The explicit separation of local physics encoding (teachers) from regime selection (student) is a clean architectural choice that could generalize to other heterogeneous traffic settings.
major comments (2)
- [case study results] The superiority claim rests on the MLP student correctly identifying traffic characteristics to select the appropriate PIDL teacher. The case study results report only aggregate relative L2 errors for the full ensemble; no per-regime classification accuracy, confusion matrix, or ablation (ensemble performance versus forced-wrong-teacher) is supplied. Without these, it is impossible to determine whether misclassification rates at VSL transitions are low enough to preserve the reported L2 advantage.
- [case study results] The experimental description provides no details on the dataset (e.g., source, length, sensor density), the precise baseline methods and their hyper-parameters, the training protocol for the MLP classifier, or statistical measures such as standard deviations across runs. These omissions make the quantitative comparison difficult to interpret or reproduce.
minor comments (1)
- [abstract] The abstract states that the student 'selects the ensemble member' but does not indicate how many teachers are used or how the VSL scenarios are partitioned; adding this information would clarify the scale of the ensemble.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments on our manuscript. These observations highlight important aspects of validation and reproducibility that strengthen the presentation of our teacher-student ensemble framework for traffic state estimation under varying speed limits. We address each major comment below and have revised the manuscript to incorporate the requested analyses and details.
read point-by-point responses
-
Referee: [case study results] The superiority claim rests on the MLP student correctly identifying traffic characteristics to select the appropriate PIDL teacher. The case study results report only aggregate relative L2 errors for the full ensemble; no per-regime classification accuracy, confusion matrix, or ablation (ensemble performance versus forced-wrong-teacher) is supplied. Without these, it is impossible to determine whether misclassification rates at VSL transitions are low enough to preserve the reported L2 advantage.
Authors: We agree that aggregate L2 errors alone are insufficient to fully validate the regime-selection mechanism. In the revised manuscript we have added a confusion matrix for the MLP classifier across the traffic regimes induced by VSL, per-regime classification accuracies, and an ablation study that compares ensemble performance against forced routing to an incorrect teacher. These results, now presented in the expanded Section 4.3 and new Figure 5, show that misclassification rates remain low at VSL transitions and that the reported L2 advantage is preserved. We believe this directly addresses the concern about whether the student’s decisions are reliable enough to support the overall claim. revision: yes
-
Referee: [case study results] The experimental description provides no details on the dataset (e.g., source, length, sensor density), the precise baseline methods and their hyper-parameters, the training protocol for the MLP classifier, or statistical measures such as standard deviations across runs. These omissions make the quantitative comparison difficult to interpret or reproduce.
Authors: We acknowledge that the original experimental section lacked sufficient detail for reproducibility. The revised manuscript now provides: (i) the dataset source, corridor length, and sensor density used in the case study; (ii) explicit descriptions and hyper-parameter settings for all baseline methods; (iii) the full training protocol for the MLP classifier (optimizer, learning rate schedule, epochs, batch size, and regularization); and (iv) mean relative L2 errors together with standard deviations computed over multiple independent runs with different random seeds. These additions appear in the expanded Section 4 and its accompanying tables, enabling readers to interpret and replicate the quantitative comparisons. revision: yes
Circularity Check
No significant circularity; derivation is self-contained empirical validation of ensemble architecture
full rationale
The paper defines a teacher-student ensemble where PIDL teachers locally encode the flow conservation law as a standard physics constraint during training, and the student MLP performs classification on state features to route inputs to the appropriate teacher. TSE outputs are then produced by the selected teacher and evaluated via relative L2 error on held-out case-study data against external baselines. No equation or result reduces to a fitted parameter being renamed as a prediction, no self-citation chain supplies the central uniqueness claim, and no ansatz is smuggled in; the performance numbers are direct outputs of standard supervised training plus classification, not tautological re-statements of the inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- Neural network weights and biases
axioms (1)
- domain assumption Flow conservation law holds for traffic flow
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The cost function of a PIDL neural network encodes the physics of traffic flow in the physics cost term J_PHY ... J = μ∗J_PHY + (1−μ)∗J_DL (Eq. 4); J_PHY = 1/Nc Σ |∂ρ̂/∂t + vf(1−2ρ̂/ρm)∂ρ̂/∂x|^2 (Eq. 5)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Traffic state estimation on highway: A comprehensive survey,
T. Seo, A. M. Bayen, T. Kusakabe, and Y . Asakura, “Traffic state estimation on highway: A comprehensive survey,”Annual reviews in control, vol. 43, pp. 128–151, 2017
work page 2017
-
[2]
M. Treiber and A. Kesting, “Traffic flow dynamics,”Traffic Flow Dy- namics: Data, Models and Simulation, Springer-Verlag Berlin Heidel- berg, pp. 983–1000, 2013
work page 2013
-
[3]
Physics informed deep learning for traffic state estimation,
A. J. Huang and S. Agarwal, “Physics informed deep learning for traffic state estimation,” in2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), 2020, pp. 1–6
work page 2020
-
[4]
——, “Physics-informed deep learning for traffic state estimation: Il- lustrations with lwr and ctm models,”IEEE Open Journal of Intelligent Transportation Systems, vol. 3, pp. 503–518, 2022
work page 2022
-
[5]
T. Seo, T. T. Tchrakian, S. Zhuk, and A. M. Bayen, “Filter comparison for estimation on discretized pdes modeling traffic: Ensemble kalman filter and minimax filter,” in2016 IEEE 55th Conference on Decision and Control (CDC). IEEE, 2016, pp. 3979–3984
work page 2016
-
[6]
A. Sumalee, R. Zhong, T. Pan, and W. Szeto, “Stochastic cell trans- mission model (sctm): A stochastic dynamic traffic model for traffic state surveillance and assignment,”Transportation Research Part B: Methodological, vol. 45, no. 3, pp. 507–533, 2011
work page 2011
-
[7]
C. M. Tamp `ere and L. Immers, “An extended kalman filter application for traffic state estimation using ctm with implicit mode switching and dynamic parameters,” in2007 IEEE Intelligent Transportation Systems Conference. IEEE, 2007, pp. 209–216
work page 2007
-
[8]
An adaptive freeway traffic state estimator,
Y . Wang, M. Papageorgiou, A. Messmer, P. Coppola, A. Tzimitsi, and A. Nuzzolo, “An adaptive freeway traffic state estimator,”Automatica, vol. 45, no. 1, pp. 10–24, 2009
work page 2009
-
[9]
A data fusion approach for real-time traffic state estimation in urban signalized links,
M. R. Shahrbabaki, A. A. Safavi, M. Papageorgiou, and I. Papami- chail, “A data fusion approach for real-time traffic state estimation in urban signalized links,”Transportation research part C: emerging technologies, vol. 92, pp. 525–548, 2018
work page 2018
-
[10]
Road traffic data: Collection methods and applic- ations,
G. Leducet al., “Road traffic data: Collection methods and applic- ations,”Working Papers on Energy, Transport and Climate Change, vol. 1, no. 55, pp. 1–55, 2008
work page 2008
-
[11]
Dynamic data- driven local traffic state estimation and prediction,
C. Antoniou, H. N. Koutsopoulos, and G. Yannis, “Dynamic data- driven local traffic state estimation and prediction,”Transportation Research Part C: Emerging Technologies, vol. 34, pp. 89–107, 2013
work page 2013
-
[12]
Coordinated variable speed limit, ramp metering and lane change control of highway traffic,
Y . Zhang and P. A. Ioannou, “Coordinated variable speed limit, ramp metering and lane change control of highway traffic,”IFAC- PapersOnLine, vol. 50, no. 1, pp. 5307–5312, 2017
work page 2017
-
[13]
Event-triggered varying speed limit control of stop-and-go traffic,
N. Espitia, H. Yu, and M. Krstic, “Event-triggered varying speed limit control of stop-and-go traffic,”IFAC-PapersOnLine, vol. 53, no. 2, pp. 7509–7514, 2020
work page 2020
-
[14]
Applications of variable speed drive (vsd) in electrical motors energy savings,
R. Saidur, S. Mekhilef, M. B. Ali, A. Safari, and H. A. Mohammed, “Applications of variable speed drive (vsd) in electrical motors energy savings,”Renewable and sustainable energy reviews, vol. 16, no. 1, pp. 543–550, 2012
work page 2012
-
[15]
Evaluation of variable speed limits to improve traffic safety,
C. Lee, B. Hellinga, and F. Saccomanno, “Evaluation of variable speed limits to improve traffic safety,”Transportation research part C: emerging technologies, vol. 14, no. 3, pp. 213–228, 2006
work page 2006
-
[16]
Analysis and control of a non-standard hyperbolic pde traffic flow model,
I. Karafyllis, N. Bekiaris-Liberis, and M. Papageorgiou, “Analysis and control of a non-standard hyperbolic pde traffic flow model,”arXiv preprint arXiv:1707.02209, 2017
-
[17]
Y . LeCun, Y . Bengio, and G. Hinton, “Deep learning,”nature, vol. 521, no. 7553, pp. 436–444, 2015
work page 2015
-
[18]
Data-driven projection method in fluid simulation,
C. Yang, X. Yang, and X. Xiao, “Data-driven projection method in fluid simulation,”Computer Animation and Virtual Worlds, vol. 27, no. 3-4, pp. 415–424, 2016
work page 2016
-
[19]
N. Geneva and N. Zabaras, “Quantifying model form uncertainty in reynolds-averaged turbulence models with bayesian deep neural networks,”Journal of Computational Physics, vol. 383, pp. 125–147, 2019
work page 2019
-
[20]
Artificial neural networks for solving ordinary and partial differential equations,
I. E. Lagaris, A. Likas, and D. I. Fotiadis, “Artificial neural networks for solving ordinary and partial differential equations,”IEEE transac- tions on neural networks, vol. 9, no. 5, pp. 987–1000, 1998
work page 1998
-
[21]
M. Raissi, P. Perdikaris, and G. E. Karniadakis, “Physics informed deep learning (part i): Data-driven solutions of nonlinear partial differential equations,”arXiv preprint arXiv:1711.10561, 2017
work page Pith review arXiv 2017
-
[22]
——, “Physics informed deep learning (part ii): Data-driven dis- covery of nonlinear partial differential equations,”arXiv preprint arXiv:1711.10566, 2017
-
[23]
A physics-informed deep learning framework for inversion and surrogate modeling in solid mechanics,
E. Haghighat, M. Raissi, A. Moure, H. Gomez, and R. Juanes, “A physics-informed deep learning framework for inversion and surrogate modeling in solid mechanics,”Computer Methods in Applied Mechan- ics and Engineering, vol. 379, p. 113741, 2021
work page 2021
-
[24]
A survey on ensemble learning,
X. Dong, Z. Yu, W. Cao, Y . Shi, and Q. Ma, “A survey on ensemble learning,”Frontiers of Computer Science, vol. 14, pp. 241–258, 2020
work page 2020
-
[25]
Research on ensemble learning,
F. Huang, G. Xie, and R. Xiao, “Research on ensemble learning,” in 2009 International Conference on Artificial Intelligence and Compu- tational Intelligence, vol. 3. IEEE, 2009, pp. 249–252
work page 2009
-
[26]
J. Wu and J. M. Rehg, “Object detection,”Ensemble machine learning: Methods and applications, pp. 225–250, 2012
work page 2012
-
[27]
Classifier boosting for human activity recognition,
R. Hamid, “Classifier boosting for human activity recognition,”En- semble Machine Learning: Methods and Applications, pp. 251–272, 2012
work page 2012
-
[28]
R. Polikar, “Ensemble learning,”Ensemble machine learning: Methods and applications, pp. 1–34, 2012
work page 2012
-
[29]
B. D. Greenshields, J. Bibbins, W. Channing, and H. Miller, “A study of traffic capacity,” inHighway research board proceedings, vol. 14, no. 1. Washington, DC, 1935, pp. 448–477
work page 1935
-
[30]
On kinematic waves ii. a theory of traffic flow on long crowded roads,
M. J. Lighthill and G. B. Whitham, “On kinematic waves ii. a theory of traffic flow on long crowded roads,”Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences, vol. 229, no. 1178, pp. 317–345, 1955
work page 1955
-
[31]
A physics-informed deep learning paradigm for traffic state and fundamental diagram estimation,
R. Shi, Z. Mo, K. Huang, X. Di, and Q. Du, “A physics-informed deep learning paradigm for traffic state and fundamental diagram estimation,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 8, pp. 11 688–11 698, 2022
work page 2022
-
[32]
A. J. Huang and S. Agarwal, “On the limitations of physics-informed deep learning: Illustrations using first order hyperbolic conservation law-based traffic flow models,”IEEE Open Journal of Intelligent Transportation Systems, vol. 4, pp. 279–293, 2023
work page 2023
-
[33]
Physics-informed deep learning for traffic state estimation: A survey and the outlook,
X. Di, R. Shi, Z. Mo, and Y . Fu, “Physics-informed deep learning for traffic state estimation: A survey and the outlook,”arXiv preprint arXiv:2303.02063, 2023
-
[34]
Analytical and grid-free solutions to the lighthill–whitham–richards traffic flow model,
P.-E. Mazar ´e, A. H. Dehwah, C. G. Claudel, and A. M. Bayen, “Analytical and grid-free solutions to the lighthill–whitham–richards traffic flow model,”Transportation Research Part B: Methodological, vol. 45, no. 10, pp. 1727–1748, 2011
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.