Recognition: 2 theorem links
· Lean TheoremCrash Assessment via Mesh-Based Graph Neural Networks and Physics-Aware Attention
Pith reviewed 2026-05-13 04:52 UTC · model grok-4.3
The pith
Hybrid mesh-attention models predict full-vehicle crash deformations with 3.20 mm mean error and better structural plausibility than attention-only baselines.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
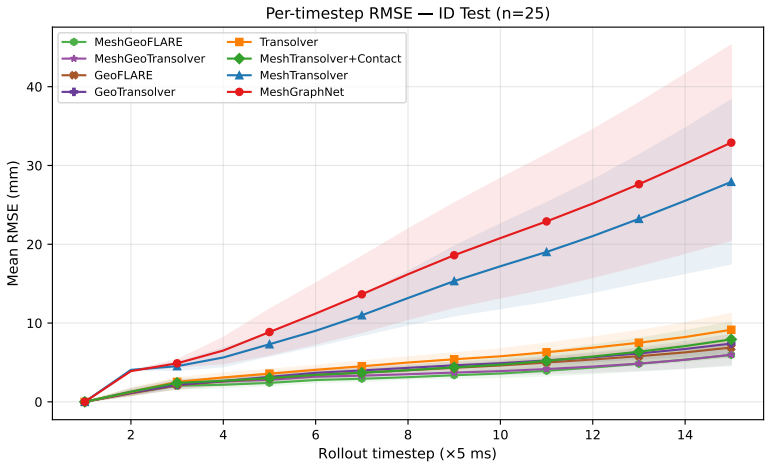
Hybrid architectures that combine local mesh message passing, geometry-aware global attention, and sparse contact-aware correction deliver full-field displacement predictions whose temporal mean root-mean-square error is 3.20 mm on a 25-sample industrial test set, while preserving spatial regularity and survival-space consistency that pure attention baselines lose to local noise.
What carries the argument
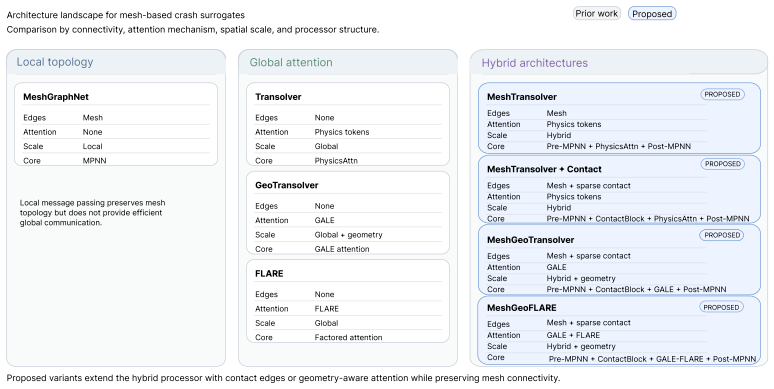
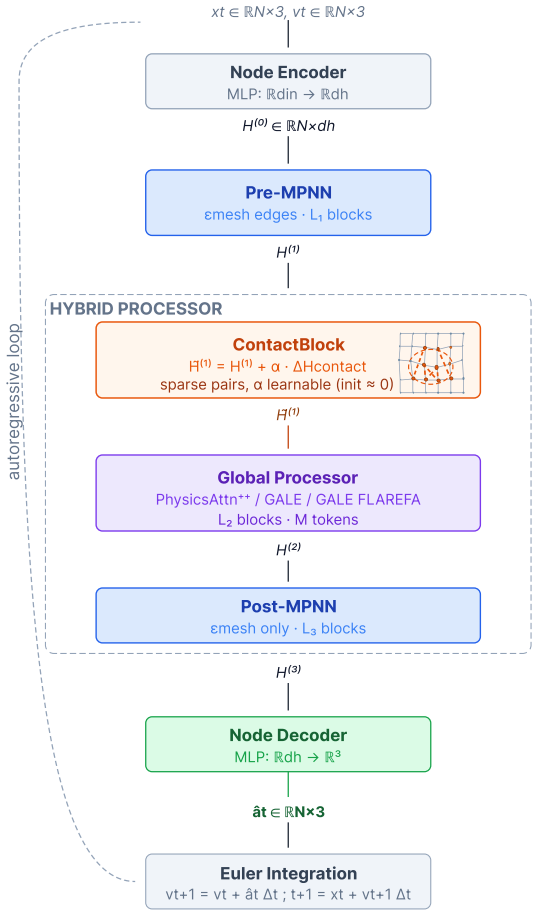
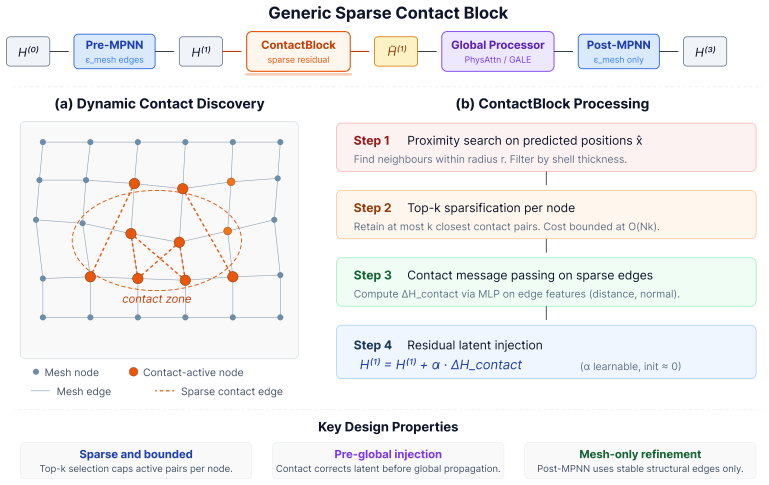
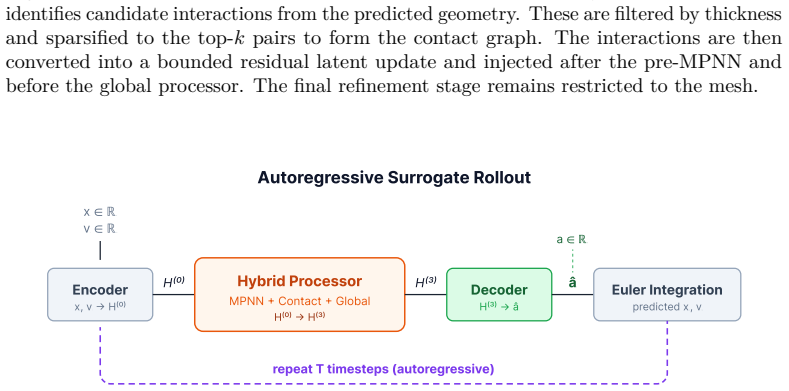
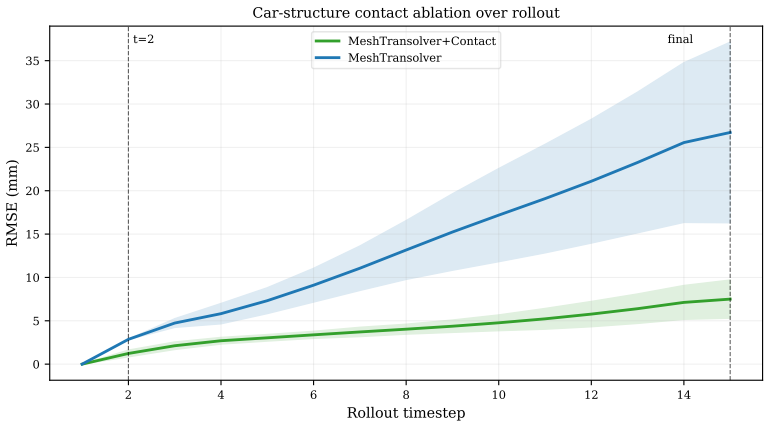
Hybrid mesh-attention architecture that pairs local mesh-graph message passing for short-range structural interactions with global geometry-aware attention for long-range deformation patterns, plus sparse contact correction for autoregressive rollout.
If this is right
- Faster full-field predictions allow more design iterations before full simulations are run.
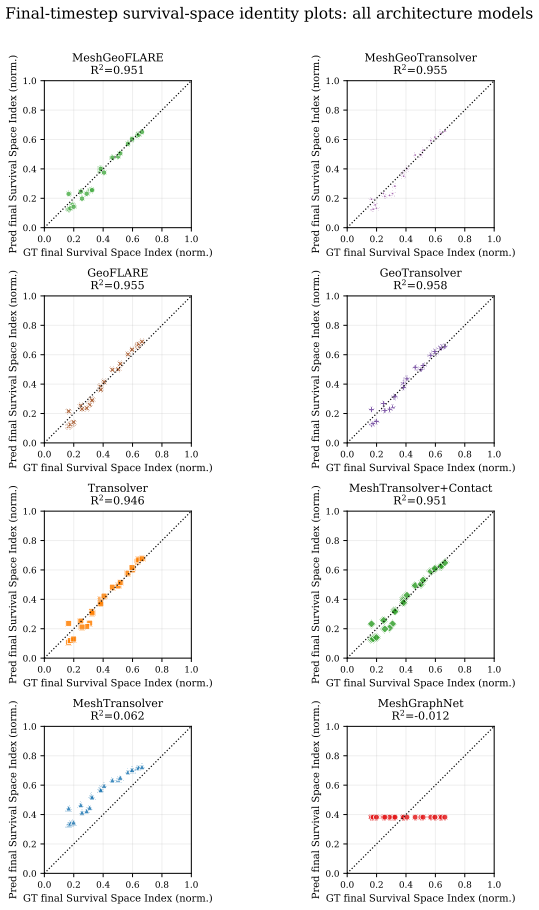
- Assessment must combine global error with survival-space metrics and side-view field inspection to catch irregularities.
- Hybrid models achieve better balance of scalar accuracy and physical interpretability than single-component architectures.
- Sparse contact modeling influences dynamic proximity effects during long rollouts.
- The approach supports industrial crash-engineering workflows that need both speed and structural fidelity.
Where Pith is reading between the lines
- Training on broader crash-mode distributions could extend the surrogates to frontal or offset impacts without retraining from scratch.
- Embedding the models inside gradient-based optimization loops would let engineers directly optimize geometry for crash metrics.
- Adding explicit conservation-law penalties during training might reduce the need for post-hoc qualitative checks.
Load-bearing premise
That accuracy and visual plausibility on 25 samples are enough to confirm the models remain structurally valid and useful for engineering across different crash types.
What would settle it
A quantitative check on an unseen crash configuration that measures whether the predicted fields violate global momentum or energy conservation relative to a full finite-element reference run.
Figures








read the original abstract
Full-vehicle crash simulations are computationally expensive, limiting their use in iterative design exploration. This work investigates learned hybrid surrogate models (MeshTransolver, MeshGeoTransolver, and MeshGeoFLARE) for predicting time-resolved structural deformation fields in an industrial lateral pole-impact benchmark. We evaluate whether neural surrogates can reproduce full-field crash kinematics with sufficient accuracy, spatial regularity, and structural plausibility for engineering interpretation. The proposed architectures combine local mesh message passing, geometry-aware global attention, and sparse contact-aware correction for autoregressive crash rollout. We compare mesh-based graph neural networks, attention-based geometric models, and hybrid architectures under a common training and hyperparameter configuration. The hybrid models capture both short-range structural interactions and long-range deformation patterns, while a sparse contact-aware variant assesses the effect of dynamic proximity interactions during rollout. On a 25-sample full-vehicle test set, the best hybrid model achieves a temporal mean root-mean-square error of 3.20 mm. While geometry-aware attention baselines are quantitatively competitive, qualitative side-view inspection shows they can introduce local spatial noise and deformation irregularities that complicate structural interpretation. In contrast, hybrid mesh-attention models provide the best balance between scalar accuracy, survival-space consistency, and physically interpretable displacement fields. These results suggest that crash surrogate assessment should combine global error metrics with downstream safety-relevant quantities and qualitative field inspection. The proposed methodology enables fast full-field predictions while preserving essential structural information for industrial crash-engineering analysis.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes hybrid mesh-based graph neural network architectures (MeshTransolver, MeshGeoTransolver, MeshGeoFLARE) that combine local mesh message passing, geometry-aware global attention, and sparse contact-aware correction to serve as fast surrogates for time-resolved full-vehicle crash deformation prediction in a lateral pole-impact benchmark. It reports that the best hybrid model attains a temporal mean RMSE of 3.20 mm on a 25-sample held-out test set and argues that these hybrids achieve the best trade-off among scalar accuracy, survival-space consistency, and physically interpretable displacement fields relative to pure attention or mesh baselines.
Significance. If the central accuracy and plausibility claims are substantiated by additional physical-consistency diagnostics, the work would offer a practical route to accelerating iterative crash-design loops in industry, where full finite-element simulations remain prohibitively expensive. The emphasis on combining global error metrics with downstream safety quantities and qualitative field inspection is a constructive methodological suggestion for surrogate assessment in structural mechanics.
major comments (2)
- [Evaluation / Results] The evaluation on the 25-sample full-vehicle test set reports a temporal mean RMSE of 3.20 mm but provides no information on training/validation splits, error bars across multiple runs, or the hyperparameter search protocol. Without these details the quantitative superiority of the hybrid models over geometry-aware attention baselines cannot be assessed for statistical robustness.
- [Results (25-sample test set)] Autoregressive rollout performance is assessed solely via point-wise RMSE and qualitative side-view inspection. No quantitative verification of global invariants (linear or angular momentum, total energy balance) or contact-force consistency is presented, leaving open the possibility that low local errors mask accumulated dynamic drift that would be unacceptable for engineering use.
minor comments (1)
- [Abstract] The abstract states that the contact-aware correction is 'sparse' but does not specify whether the correction is learned end-to-end or applied as a post-processing step; clarifying this architectural choice would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on evaluation robustness and physical consistency. We address each major comment point by point below, indicating revisions where appropriate to strengthen the manuscript.
read point-by-point responses
-
Referee: [Evaluation / Results] The evaluation on the 25-sample full-vehicle test set reports a temporal mean RMSE of 3.20 mm but provides no information on training/validation splits, error bars across multiple runs, or the hyperparameter search protocol. Without these details the quantitative superiority of the hybrid models over geometry-aware attention baselines cannot be assessed for statistical robustness.
Authors: We agree that these experimental details are essential for assessing statistical robustness. The manuscript provides the test set size and overall dataset description but does not fully specify the split methodology, hyperparameter search protocol, or run-to-run variability. In the revised manuscript we will expand the Experimental Setup section to include: (1) explicit training/validation/test split details and how the 25-sample held-out set was selected, (2) the hyperparameter tuning procedure (including search space and selection criteria), and (3) error bars or standard deviations computed from multiple independent training runs with different random seeds, reported where computationally feasible given the cost of full-vehicle mesh training. This will enable a clearer evaluation of performance differences. revision: yes
-
Referee: [Results (25-sample test set)] Autoregressive rollout performance is assessed solely via point-wise RMSE and qualitative side-view inspection. No quantitative verification of global invariants (linear or angular momentum, total energy balance) or contact-force consistency is presented, leaving open the possibility that low local errors mask accumulated dynamic drift that would be unacceptable for engineering use.
Authors: We acknowledge that point-wise RMSE and qualitative inspection alone do not fully rule out accumulated dynamic inconsistencies in autoregressive rollouts. Our evaluation emphasizes engineering-relevant quantities such as displacement accuracy and survival-space consistency, but we agree that explicit checks on physical invariants would provide stronger evidence of plausibility. In the revision we will add quantitative diagnostics: time-averaged relative errors in linear and angular momentum, total energy balance, and contact-force consistency (where ground-truth contact data are available) computed on the test-set predictions. These will be presented in an additional table or figure to complement the existing RMSE and qualitative results. revision: yes
Circularity Check
No circularity: empirical evaluation on held-out test set
full rationale
The paper reports training hybrid mesh-based GNN and attention models on crash simulation data, then evaluates temporal mean RMSE (3.20 mm) and qualitative properties on a separate 25-sample full-vehicle test set. No derivation chain, first-principles result, or prediction is claimed that reduces by construction to fitted inputs or self-citations. Standard supervised learning with independent test evaluation is used; the central performance claims are direct measurements on unseen data and do not rely on any self-referential reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
EURO NCAP, EURO NCAP lateral pole test protocol, v10.1,https: //www.euroncap.com(2023)
work page 2023
-
[2]
National Highway Traffic Safety Administration, FMVSS 214 side impact protection standard, Tech. rep., NHTSA (2022)
work page 2022
- [3]
-
[4]
A. Sanchez-Gonzalez, J. Godwin, T. Pfaff, R. Ying, J. Leskovec, P. Battaglia, Learning to simulate complex physics with graph networks, in: International Conference on Machine Learning (ICML), PMLR, 2020, pp. 8459–8468
work page 2020
-
[5]
H. Wu, H. Luo, H. Wang, J. Wang, M. Long, Transolver: A fast trans- former solver for PDEs on general geometries, in: Proceedings of the International Conference on Machine Learning (ICML), 2024
work page 2024
- [6]
-
[7]
H.Luo, H.Wu, H.Zhou, L.Xing, Y.Di, J.Wang, M.Long, Transolver++: An accurate neural solver for PDEs on million-scale geometries, in: Pro- ceedings of the International Conference on Machine Learning (ICML), 2025
work page 2025
- [8]
- [9]
- [10]
-
[11]
NVIDIA, PhysicsNeMo: Open-source framework for physics- ai model development, https://docs.nvidia.com/physicsnemo/ latest/overview.html, accessed: 2026-04-08 (2025)
work page 2026
-
[12]
M. D. McKay, R. J. Beckman, W. J. Conover, A comparison of three methods for selecting values of input variables in the analysis of output from a computer code, Technometrics 21 (2) (1979) 239–245
work page 1979
-
[13]
I. Loshchilov, F. Hutter, Decoupled weight decay regularization, interna- tional Conference on Learning Representations (ICLR) (2019)
work page 2019
-
[14]
I. Loshchilov, F. Hutter, SGDR: Stochastic gradient descent with warm restarts, international Conference on Learning Representations (ICLR) (2017). 40
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.